- USRP X440
东枫科技
fpga开发
产品概述USRPX440是EttusResearch推出的高性能、多通道、宽带软件定义无线电(SDR)系统。基于XilinxZynqUltraScale+RFSoC架构,它提供高密度、相干性的信号收发能力,帮助您快速构建雷达、电子战(EW)、卫星通信(SATCOM)及毫米波原型系统。核心特性8路独立可调谐Tx/Rx通道支持高达8路发射和8路接收,通道间时钟共享实现相位相干(同设备内< 1° RMS
- 《用上位机控制无人机:Python+MAVLink协议飞行实验》
欧振芳
python
1.实验目标-通过Python编写的上位机程序,基于MAVLink协议控制无人机(如PX4/ArduPilot固件的无人机)。-实现基础飞行指令:解锁、起飞、悬停、降落。-探索MAVLink消息的构造与解析机制。2.实验环境准备硬件-无人机硬件:支持MAVLink协议的飞控(如Pixhawk系列)。-通信链路:USB直连、数传电台(3DRRadio)或WiFi(如通过UDP)。-安全环境:空旷无干
- Pixhawk源码笔记五:存储与EEPROM管理
zhouxinlin2009
这里,我们对APMEEPROM存储接口进行讲解。如有问题,可以交流
[email protected]。新浪@WalkAnt,转载本博客文章,请注明出处,以便更大范围的交流,谢谢。第六部分存储与EEPROM管理详细参考:http://dev.ardupilot.com/wiki/learning-ardupilot-storage-and-eeprom-management/用户参数、航点、集结点、地图
- 【飞控】PX4固件和APM固件
琛:D
飞控px4
背景记录:PIXHAWK2.4.8在刷固件时,PX4固件的官配是px4_fmu-v3_default.px4,在实际中很多资料中使用的是APM固件。疑问点:PIXHAWK兼容APM固件吗?APM固件与PX4固件的关系?一、硬件:APM与PIXHAWK1.APM硬件定位:早期开源飞控硬件标杆,基于ArduinoMega2560开发(8位AVR架构),代表型号包括APM2.5、APM2.6。特点:集成
- Px4+gazebo+ros2+QGC实现轨迹跟踪仿真
我心爱的px4
ubuntu无人机目标跟踪
本次教程是我走了很多弯路摸索出来的,如果和我一样使用的是Ubuntu22.04版本的话应该不会有什么问题,其他版本的ubuntu可能会有版本不兼容的问题,仅供参考下图是本次环境配置的构架图,以PX4为中心来实现Ubuntu中的无人机轨迹跟踪仿真一、gazebo仿真环境搭建与px4的编译这里我使用的Ubuntu版本是22.04,安装的是较新的gazebogarden,不是传统的gazeboclass
- mavros安装——解决疑难杂症- PX4无人机配置流程(三)
天月风沙
PX4无人机配置流程无人机
介绍Ubuntu机载计算机:树莓派4,安装Ubuntu20.04的教程我主页有飞控:微空科技MICOAIR_H743坑:mavros运行所必须要需要的GeographicLib太难下了,一直下不下来,在网上各种百度,没找到有用的,最后在csdn里面找到了答案。注:mavros和其他包一样,有两种安装方法,一个是源码,另一个是二进制。区别是二进制版的只能用ros命令调用mavros,看不到源代码,优
- 在ROS2(humble)+Gazebo+rqt下,实时显示仿真无人机的相机图像
风暴智能
从零开始开发无人机无人机linux
文章目录前言一、版本检查检查ROS2版本二、步骤1.下载对应版本的PX4(1)检查PX4版本(2)修改文件名(3)下载正确的PX4版本2.下载对应版本的Gazebo(1)检查Gazebo版本(2)卸载不正确的Gazebo版本(3)下载正确的Gazebo版本3.安装bridge包4.启动总结前言在ROS2的环境下,进行无人机仿真的过程中,有时需要调取无人机的相机图像信息,这里使用rqt获取。提示:注
- XTDrone 无人机仿真平台教程
叶展冰Guy
XTDrone无人机仿真平台教程项目地址:https://gitcode.com/gh_mirrors/xt/XTDrone1.项目介绍XTDrone是一个基于PX4、ROS和Gazebo的开源无人机仿真平台,支持多种类型的无人机模拟,包括多旋翼(四轴和六轴)、固定翼以及复合翼(quadplanetailsitter和tiltrotor)。此外,它还能够模拟无人车、无人船和机械臂等其他无人系统。通
- docker部署XTdrone
淮北494
docker容器运维
目录一、前置准备二、依赖安装三、ros安装四、gazebo安装五、mavros安装六、PX4的配置七、Xtdrone源码下载八、xtdrone与gazebo(实际上应该是第四步之后做这件事)九、键盘控制参考链接:仿真平台基础配置·语雀一、前置准备1.在docker创建ros-noetic环境,并实现gazebo和rviz可视化参考:如何使用docker配置ros-noetic环境并使用rviz,g
- 【NextPilot日志移植】ULog
hallo-ooo
NextPilot日志移植日志系统
ULog日志系统详解关键词:结构化日志、飞行数据记录、自描述格式、嵌入式系统、PX4、NextPilot一、ULog是什么?ULog(UniversalLog)是PX4/NextPilot飞控系统中使用的结构化日志格式,用于记录飞行过程中的传感器数据、参数、状态信息、错误日志等。✅主要用途:飞行数据记录(如IMU、GPS、电池状态)参数变化记录(PID调整、RC映射等)调试输出(如PX4_INFO
- 大模型驱动的智能无人机应用开发2:无人机基本控制
yc_AI
无人机大模型无人机pythonnlptransformerchatgpt大模型深度学习
AirSim中无人机控制主要分为手动控制和编程(API)控制两大类。手动控制依赖于RC遥控器、键盘或游戏手柄等外部输入设备;而编程控制则通过AirSim各语言客户端提供的RPC接口,按需调用相应命令,实现无人机的自动化飞行。1.手动控制1.1RC遥控器控制AirSim支持硬件在环(HIL),可以将真实的飞控(如PX4)和RC遥控器信号桥接到模拟环境中进行测试。通过在settings.json中配置
- px4+gazebo仿真环境搭建
我心爱的px4
ubuntu无人机
一、网络配置首先最重要的是能够正常使用谷歌浏览器(正常上网),网络问题欢迎私信交流二、先安装gazebogarden这里我使用的Ubuntu版本是22.04,安装的是较新的gazebogarden,不是传统的gazeboclassic,gazeboclassic容易出现无人机显示不出来的问题。接下来是安装步骤:1、添加软件源:sudowgethttps://packages.osrfoundati
- ubuntu22.04编译PX4无人机仿真实践
不要绝望总会慢慢变强
视觉大作战无人机
克隆PX4源码,并且更新子模块gitclonehttps://github.com/PX4/PX4-Autopilot.git--recursivegitsubmoduleupdate--init--recursive#强制同步所有子模块接着安装相关依赖:bash./PX4-Autopilot/Tools/setup/ubuntu.sh运行以下命令进行编译:cd~/PX4-Autopilot/ma
- uORB_发布-订阅消息通信框架
hallo-ooo
uORB
uORB通信机制详解uORB(microObjectRequestBroker)是PX4系统中的发布-订阅消息通信框架,负责在系统模块之间传递结构化的数据。uORB是什么是PX4内部模块间通信的“消息总线”。实现模块之间解耦通信:发送者和接收者不需要彼此知道对方是谁。每个通信数据结构叫做一个“Topic”。基本概念术语含义Topic定义好的数据结构,用于在模块之间传输数据Publisher向某个T
- 开源飞控软件:推动无人机技术进步的引擎
老猿讲编程
开源无人机
在过去的二十年里,众多开源自动驾驶仪项目极大地推动了无人机技术的发展。像MatrixPilot、Baseflight、TauLabs、OpenPilot、Cleanflight、MultiWii和dRonin等一些开源自动驾驶仪项目已经停止开发,然而,Ardupilot/APM、Pixhawk/PX4、Paparazzi、LibrePilot、Betaflight和iNAV等项目至今仍具有重要意义
- 从零开始学习PX4源码6(uORB)
魔城烟雨
从零开始学习PX4学习log4j
目录文章目录目录摘要0.为什么要学习uORB0.1uORB?0.2控制协议与逻辑0.3在整个代码框架中的位置1.uORB简介1.1uORB的主要特点1.2使用uORB的基本步骤1.3使用uORB的实例2.uORB常用函数解析2.1发布一个主题用到的函数2.2订阅一个主题用到的函数3.自定义uORB消息3.1定义msg文件3.2uORB消息发布和订阅3.3修改飞控.cmake文件摘要本节主要讲义px
- PX4飞控固件软硬件架构介绍
符旭煊Richard
PX4飞控固件软硬件架构介绍【下载地址】PX4飞控固件软硬件架构介绍PX4开源飞控固件是一款专为无人机设计的高性能控制系统,采用模块化架构,支持多种硬件平台。其硬件架构集成微控制器、传感器和通信接口,确保稳定飞行;软件架构涵盖驱动、控制、任务调度和通信模块,实现精准的飞行控制与任务管理。PX4支持多种接收器协议,如PPM、PWM和SBUS,并采用先进的PID控制和卡尔曼滤波算法,确保姿态稳定与位置
- ardupilot罗盘校准代码分析
魔城烟雨
ardupilot学习
目录文章目录目录摘要第一节:原理图学习第二节:飞控代码学习如何启动罗盘校准?1.通过地面站开启罗盘校准2.通过遥控器开启罗盘校准第三节:如何获取采样数据?第四节:如何进行罗盘校准?第五节:校准后的偏移量如何参与计算偏航第六节:如何提示校准数据到地面站1.发送校准进程2.发送校准结果摘要本节主要学习ardupilot如何实现罗盘校准,采用的飞控硬件是pixhawk_v5,软件代码版本3.6.8,欢迎
- 【无人机】无人机遥控器设置与校准,飞行模式的选择,无线电控制 (RC) 设置
月阳羊
无人机无人机
目录1、遥控器校准1.1、校准步骤2、飞行模式选择,遥控器通道映射2.1、配置步骤1、遥控器校准在校准无线电系统之前,必须连接/绑定接收器和发射器。绑定发射器和接收器对的过程是特定于硬件的(有关说明,请参阅RC手册)。参考:RadioControl(RC)Setup|PX4Guide(v1.15)1.1、校准步骤校准过程很简单-系统会要求您以屏幕右上角的发射器图上显示的特定模式移动摇杆。要校准无线
- 【无人机】无人机测距仪测距模块的配置,PX4使用手册的详细介绍
月阳羊
无人机无人机cocos2d游戏引擎人工智能
距离传感器(测距仪)参考:DistanceSensors(Rangefinders)|PX4Guide(v1.15)距离传感器可提供距离测量数据,这些数据可用于地形跟踪、地形保持(例如用于摄影的精确悬停)、改善着陆性能(条件测距辅助)、警示规定高度限制、预防碰撞等。本节列出了PX4支持的距离传感器(并链接到更详细的文档),所有测距仪所需的通用配置、测试方法以及Gazebo-Classic仿真信息。
- Margin和Padding在WPF和CSS中的不同
Zhen (Evan) Wang
C#WPFwpfcss
CSS和WPF中margin与padding在方向上的规定基本一致,但在使用场景和一些细节上有所不同。CSS-方向规定:margin和padding属性可以分别指定上、右、下、左四个方向的值。例如margin:10px20px30px40px;表示上外边距为10px、右外边距为20px、下外边距为30px、左外边距为40px。padding的用法同理。如果只设置一个值,则表示四个方向统一的外边距或
- MAVLink 通信协议简介:无人机与机器人系统的轻量级解决方案
爱素颜的露西
无人机机器人
MAVLink是一种轻量级、二进制的消息传输协议,广泛应用于无人机和机器人系统中,用于系统与控制台或地面站之间的通信。MAVLink的全称是MicroAirVehicleLink,它最早由LorenzMeier在2009年开发,并逐渐成为开源无人机控制软件如PX4和ArduPilot的标准通信协议。MAVLink的设计特点包括:轻量级:MAVLink消息使用小于255字节的包,因此非常适合带宽有限
- 无人机:PX4 based drones_(2).无人机系统架构
zhubeibei168
无人机无人机系统架构cocos2d
无人机系统架构在本节中,我们将详细介绍无人机系统的架构,特别是基于PX4的无人机。PX4是一种开源的无人机自驾仪,广泛应用于各种无人机项目中。了解无人机系统的架构对于进行二次开发和自定义控制至关重要。本节将涵盖以下几个方面:硬件架构软件架构通信架构传感器与执行器飞控算法1.硬件架构无人机的硬件架构是整个系统的基础,决定了无人机的性能、可靠性和扩展性。典型的PX4基无人机硬件架构包括以下几个部分:1
- make: *** [Makefile:226:px4_sitl_default] 错误 1
davidson1471
git
makepx4_sitl_defaultgazebo时出现错误make:***[Makefile:226:px4_sitl_default]错误1cdPX4-Autopilotgitsubmoduleupdate--recursivemakedistcleanmakepx4_sitl_defaultgazebo
- PX4垂起(Tiltrotor)偏航控制研究
zhao23333
PX4
PX4垂起(Tiltrotor)偏航控制研究PX4垂起(Tiltrotor)偏航控制研究1.问题描述2.过渡过程中为什么没有偏航角度控制问题1:为什么在过渡阶段固定翼位置控制没有起作用?问题2:关于virtual_attitude_setpoint的使用问题3:为什么过渡状态姿态角给定值是固定的姿态控制给出的?3.如何修改固件使倾转旋翼在过渡状态也控制角度PX4垂起(Tiltrotor)偏航控制研
- PX4飞控之位置控制(1)整体架构
Felix_ZL
px4飞控PX4位置控制架构
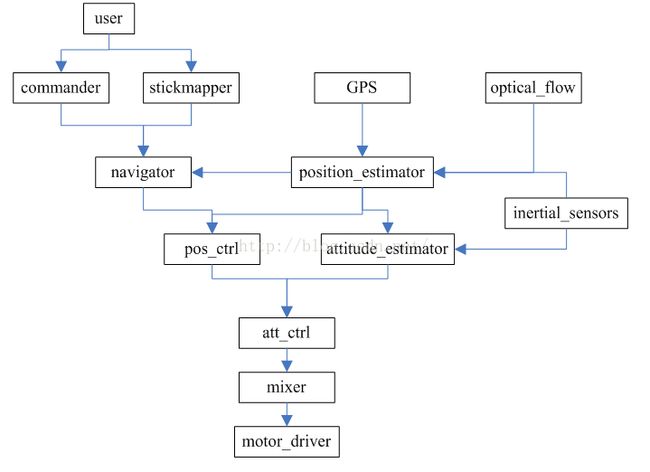
位置控制是无人机飞控的核心算法之一,一方面根据commander中的flag标志位和Navigator中提供的航点信息进行控制(自主模式下),另一方面得到期望姿态角(setpoint)的四元数信息,给到姿态控制模块进行姿态控制。本文重点PX4飞控的位置控制的代码整体架构(mc_pos_control),具体的控制算法将在后续文章中陆续奉上。位置控制模块的主函数:task_main()1.订阅结构体
- ubuntu20 安装px4、mavros、QGroundControl
jjm2002
ROSgitlinuxubuntubash机器人
一、安装PX4jjm2是我的主文件夹名,可以根据自己的主文件夹名修改下载PX4gitclonehttps://github.com/PX4/PX4-Autopilot.git--recursive由于网速原因,我用的是别人已经下载好的压缩包。链接:https://pan.baidu.com/s/1WskxL3EYWfPUrKDwc3X2Ng提取码:wstc里面有PX4-Autopilot压缩包,l
- 【CSS 面经】如何画一条 0.5px 的线 ️
Peter-Lu
#CSS面经css前端javascriptcss3html
文章目录一、为什么浏览器中0.5px难以实现?二、实现0.5px线条的几种方法1.使用`transform:scale()`实现缩放2.使用`border`和`transform`结合3.使用`box-shadow`实现0.5px4.使用伪元素`::after`结合`transform`三、如何选择合适的方法?在前端开发中,我们经常会遇到这样一个问题:如何画一条0.5px的线?由于像素是浏览器渲染
- 无人机仿真XTDrone学习四:XTDrone键盘控制无人机程序分析(MAVRos)一
狮城乐哥
XTDrone学习硬件工程
在XTDrone安装完成后,运行一个键盘控制无人机程序测试XTDrone安装是否存在问题。通过分析该例程,理解ROS对无人机的控制方法与控制过程。XTDrone键盘控制无人机例程仿真XTDrone键盘控制无人机例程CSDN学习与转载仿真用键盘控制无人机飞行在一个终端运行(启动gazebo,出现了场景和飞机)cd~/PX4_Firmwareroslaunchpx4indoor1.launchGaze
- 【PX4】Ubuntu20.04安装PX4教程
davidson1471
PX4git无人机linuxubuntu
*建议早上安装*1.下载以往版本从github上clone源码gitclonehttps://github.com/PX4/PX4-Autopilot.git进入PX4-Autopilot文件夹cdPX4-Autopilot查看当前分支,位于origin/maingitstatus查看所有远程分支,带release的gitbranch-r|grep"release"切换到发行分支v1.12gitc
- java线程的无限循环和退出
3213213333332132
java
最近想写一个游戏,然后碰到有关线程的问题,网上查了好多资料都没满足。
突然想起了前段时间看的有关线程的视频,于是信手拈来写了一个线程的代码片段。
希望帮助刚学java线程的童鞋
package thread;
import java.text.SimpleDateFormat;
import java.util.Calendar;
import java.util.Date
- tomcat 容器
BlueSkator
tomcatWebservlet
Tomcat的组成部分 1、server
A Server element represents the entire Catalina servlet container. (Singleton) 2、service
service包括多个connector以及一个engine,其职责为处理由connector获得的客户请求。
3、connector
一个connector
- php递归,静态变量,匿名函数使用
dcj3sjt126com
PHP递归函数匿名函数静态变量引用传参
<!doctype html>
<html lang="en">
<head>
<meta charset="utf-8">
<title>Current To-Do List</title>
</head>
<body>
- 属性颜色字体变化
周华华
JavaScript
function changSize(className){
var diva=byId("fot")
diva.className=className;
}
</script>
<style type="text/css">
.max{
background: #900;
color:#039;
- 将properties内容放置到map中
g21121
properties
代码比较简单:
private static Map<Object, Object> map;
private static Properties p;
static {
//读取properties文件
InputStream is = XXX.class.getClassLoader().getResourceAsStream("xxx.properti
- [简单]拼接字符串
53873039oycg
字符串
工作中遇到需要从Map里面取值拼接字符串的情况,自己写了个,不是很好,欢迎提出更优雅的写法,代码如下:
import java.util.HashMap;
import java.uti
- Struts2学习
云端月影
最近开始关注struts2的新特性,从这个版本开始,Struts开始使用convention-plugin代替codebehind-plugin来实现struts的零配置。
配置文件精简了,的确是简便了开发过程,但是,我们熟悉的配置突然disappear了,真是一下很不适应。跟着潮流走吧,看看该怎样来搞定convention-plugin。
使用Convention插件,你需要将其JAR文件放
- Java新手入门的30个基本概念二
aijuans
java新手java 入门
基本概念: 1.OOP中唯一关系的是对象的接口是什么,就像计算机的销售商她不管电源内部结构是怎样的,他只关系能否给你提供电就行了,也就是只要知道can or not而不是how and why.所有的程序是由一定的属性和行为对象组成的,不同的对象的访问通过函数调用来完成,对象间所有的交流都是通过方法调用,通过对封装对象数据,很大限度上提高复用率。 2.OOP中最重要的思想是类,类是模板是蓝图,
- jedis 简单使用
antlove
javarediscachecommandjedis
jedis.RedisOperationCollection.java
package jedis;
import org.apache.log4j.Logger;
import redis.clients.jedis.Jedis;
import java.util.List;
import java.util.Map;
import java.util.Set;
pub
- PL/SQL的函数和包体的基础
百合不是茶
PL/SQL编程函数包体显示包的具体数据包
由于明天举要上课,所以刚刚将代码敲了一遍PL/SQL的函数和包体的实现(单例模式过几天好好的总结下再发出来);以便明天能更好的学习PL/SQL的循环,今天太累了,所以早点睡觉,明天继续PL/SQL总有一天我会将你永远的记载在心里,,,
函数;
函数:PL/SQL中的函数相当于java中的方法;函数有返回值
定义函数的
--输入姓名找到该姓名的年薪
create or re
- Mockito(二)--实例篇
bijian1013
持续集成mockito单元测试
学习了基本知识后,就可以实战了,Mockito的实际使用还是比较麻烦的。因为在实际使用中,最常遇到的就是需要模拟第三方类库的行为。
比如现在有一个类FTPFileTransfer,实现了向FTP传输文件的功能。这个类中使用了a
- 精通Oracle10编程SQL(7)编写控制结构
bijian1013
oracle数据库plsql
/*
*编写控制结构
*/
--条件分支语句
--简单条件判断
DECLARE
v_sal NUMBER(6,2);
BEGIN
select sal into v_sal from emp
where lower(ename)=lower('&name');
if v_sal<2000 then
update emp set
- 【Log4j二】Log4j属性文件配置详解
bit1129
log4j
如下是一个log4j.properties的配置
log4j.rootCategory=INFO, stdout , R
log4j.appender.stdout=org.apache.log4j.ConsoleAppender
log4j.appender.stdout.layout=org.apache.log4j.PatternLayout
log4j.appe
- java集合排序笔记
白糖_
java
public class CollectionDemo implements Serializable,Comparable<CollectionDemo>{
private static final long serialVersionUID = -2958090810811192128L;
private int id;
private String nam
- java导致linux负载过高的定位方法
ronin47
定位java进程ID
可以使用top或ps -ef |grep java
![图片描述][1]
根据进程ID找到最消耗资源的java pid
比如第一步找到的进程ID为5431
执行
top -p 5431 -H
![图片描述][2]
打印java栈信息
$ jstack -l 5431 > 5431.log
在栈信息中定位具体问题
将消耗资源的Java PID转
- 给定能随机生成整数1到5的函数,写出能随机生成整数1到7的函数
bylijinnan
函数
import java.util.ArrayList;
import java.util.List;
import java.util.Random;
public class RandNFromRand5 {
/**
题目:给定能随机生成整数1到5的函数,写出能随机生成整数1到7的函数。
解法1:
f(k) = (x0-1)*5^0+(x1-
- PL/SQL Developer保存布局
Kai_Ge
近日由于项目需要,数据库从DB2迁移到ORCAL,因此数据库连接客户端选择了PL/SQL Developer。由于软件运用不熟悉,造成了很多麻烦,最主要的就是进入后,左边列表有很多选项,自己删除了一些选项卡,布局很满意了,下次进入后又恢复了以前的布局,很是苦恼。在众多PL/SQL Developer使用技巧中找到如下这段:
&n
- [未来战士计划]超能查派[剧透,慎入]
comsci
计划
非常好看,超能查派,这部电影......为我们这些热爱人工智能的工程技术人员提供一些参考意见和思想........
虽然电影里面的人物形象不是非常的可爱....但是非常的贴近现实生活....
&nbs
- Google Map API V2
dai_lm
google map
以后如果要开发包含google map的程序就更麻烦咯
http://www.cnblogs.com/mengdd/archive/2013/01/01/2841390.html
找到篇不错的文章,大家可以参考一下
http://blog.sina.com.cn/s/blog_c2839d410101jahv.html
1. 创建Android工程
由于v2的key需要G
- java数据计算层的几种解决方法2
datamachine
javasql集算器
2、SQL
SQL/SP/JDBC在这里属于一类,这是老牌的数据计算层,性能和灵活性是它的优势。但随着新情况的不断出现,单纯用SQL已经难以满足需求,比如: JAVA开发规模的扩大,数据量的剧增,复杂计算问题的涌现。虽然SQL得高分的指标不多,但都是权重最高的。
成熟度:5星。最成熟的。
- Linux下Telnet的安装与运行
dcj3sjt126com
linuxtelnet
Linux下Telnet的安装与运行 linux默认是使用SSH服务的 而不安装telnet服务 如果要使用telnet 就必须先安装相应的软件包 即使安装了软件包 默认的设置telnet 服务也是不运行的 需要手工进行设置 如果是redhat9,则在第三张光盘中找到 telnet-server-0.17-25.i386.rpm
- PHP中钩子函数的实现与认识
dcj3sjt126com
PHP
假如有这么一段程序:
function fun(){
fun1();
fun2();
}
首先程序执行完fun1()之后执行fun2()然后fun()结束。
但是,假如我们想对函数做一些变化。比如说,fun是一个解析函数,我们希望后期可以提供丰富的解析函数,而究竟用哪个函数解析,我们希望在配置文件中配置。这个时候就可以发挥钩子的力量了。
我们可以在fu
- EOS中的WorkSpace密码修改
蕃薯耀
修改WorkSpace密码
EOS中BPS的WorkSpace密码修改
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 201
- SpringMVC4零配置--SpringSecurity相关配置【SpringSecurityConfig】
hanqunfeng
SpringSecurity
SpringSecurity的配置相对来说有些复杂,如果是完整的bean配置,则需要配置大量的bean,所以xml配置时使用了命名空间来简化配置,同样,spring为我们提供了一个抽象类WebSecurityConfigurerAdapter和一个注解@EnableWebMvcSecurity,达到同样减少bean配置的目的,如下:
applicationContex
- ie 9 kendo ui中ajax跨域的问题
jackyrong
AJAX跨域
这两天遇到个问题,kendo ui的datagrid,根据json去读取数据,然后前端通过kendo ui的datagrid去渲染,但很奇怪的是,在ie 10,ie 11,chrome,firefox等浏览器中,同样的程序,
浏览起来是没问题的,但把应用放到公网上的一台服务器,
却发现如下情况:
1) ie 9下,不能出现任何数据,但用IE 9浏览器浏览本机的应用,却没任何问题
- 不要让别人笑你不能成为程序员
lampcy
编程程序员
在经历六个月的编程集训之后,我刚刚完成了我的第一次一对一的编码评估。但是事情并没有如我所想的那般顺利。
说实话,我感觉我的脑细胞像被轰炸过一样。
手慢慢地离开键盘,心里很压抑。不禁默默祈祷:一切都会进展顺利的,对吧?至少有些地方我的回答应该是没有遗漏的,是不是?
难道我选择编程真的是一个巨大的错误吗——我真的永远也成不了程序员吗?
我需要一点点安慰。在自我怀疑,不安全感和脆弱等等像龙卷风一
- 马皇后的贤德
nannan408
马皇后不怕朱元璋的坏脾气,并敢理直气壮地吹耳边风。众所周知,朱元璋不喜欢女人干政,他认为“后妃虽母仪天下,然不可使干政事”,因为“宠之太过,则骄恣犯分,上下失序”,因此还特地命人纂述《女诫》,以示警诫。但马皇后是个例外。
有一次,马皇后问朱元璋道:“如今天下老百姓安居乐业了吗?”朱元璋不高兴地回答:“这不是你应该问的。”马皇后振振有词地回敬道:“陛下是天下之父,
- 选择某个属性值最大的那条记录(不仅仅包含指定属性,而是想要什么属性都可以)
Rainbow702
sqlgroup by最大值max最大的那条记录
好久好久不写SQL了,技能退化严重啊!!!
直入主题:
比如我有一张表,file_info,
它有两个属性(但实际不只,我这里只是作说明用):
file_code, file_version
同一个code可能对应多个version
现在,我想针对每一个code,取得它相关的记录中,version 值 最大的那条记录,
SQL如下:
select
*
- VBScript脚本语言
tntxia
VBScript
VBScript 是基于VB的脚本语言。主要用于Asp和Excel的编程。
VB家族语言简介
Visual Basic 6.0
源于BASIC语言。
由微软公司开发的包含协助开发环境的事
- java中枚举类型的使用
xiao1zhao2
javaenum枚举1.5新特性
枚举类型是j2se在1.5引入的新的类型,通过关键字enum来定义,常用来存储一些常量.
1.定义一个简单的枚举类型
public enum Sex {
MAN,
WOMAN
}
枚举类型本质是类,编译此段代码会生成.class文件.通过Sex.MAN来访问Sex中的成员,其返回值是Sex类型.
2.常用方法
静态的values()方