PCL1.11.1_(win10+vs2019)/(win10+cmake编译)/(ubuntu18.04+cmake编译)
pcl配置
- 一、windows10使用PCL库
-
- VS2019安装
- 安装PCL库
- PCL库和win10//VS2019关联
-
- 1、为了让win10认识PCL。
- 2、为了让vs2019认识PCL。
- 3、运行rabbit
- 二、cmake编译改进的pcl库
-
- 引言
- 准备工作
- cmake生成工程
- vs2019编译链接pcl工程
- 使用编译好的库
- 三、ubuntu18.04使用PCL库
-
- 前提,安装各种依赖包
- 开始安装PCL库
- 测试
-
- 1、测试pcl库中pcd文件
- 2、测试自己的cpp
- VScode的头文件路径和库路径
更新时间:2021/10/20
更新内容:cmake编译自己修改的pcl库,方便算法的复现以及改进。
一、windows10使用PCL库
参考博文:
安装vs2019
安装PCL+vs2019
下载链接:
- for pcl–>tags–>PCL 1.11.1

- for vs2019–>下载社(mian)区(fei)版

- for test rabbit.pcd
提取码:l9m0
准备安装包:
PCL-1.11.1-AllInOne-msvc2019-win64.exe
pcl-1.11.1-pdb-msvc2019-win64.zip
vs_community__353155754.1618454139.exe
rabbit.pcd
VS2019安装
1、安装Installer
使用初始安装包安装。

2、挑选喜欢的安装项目
- 工作负载:使用C++的桌面开发;Visual Studio扩展开支。
- 单个组件:默认,如果安装python请点击。
- 语言包:默认中文。
- 安装位置:选择你喜欢的安装路径(注:共享组件的路径太长,它就不干了,那就给它改小)
3、开始安装。。。耐心等待


4、启动 for helloworld
- 创建新项目
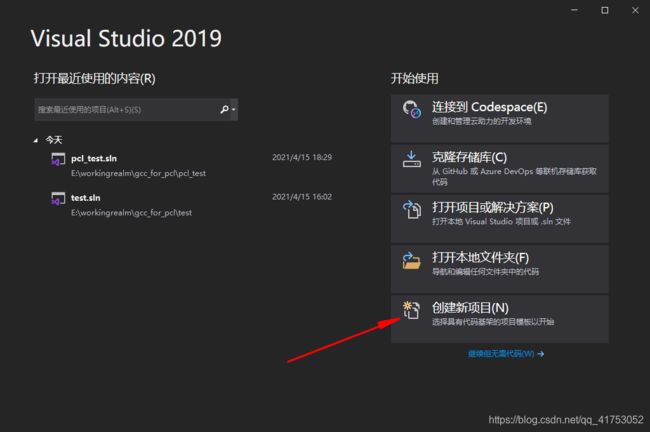
- 空项目

- 设置名儿&&路径

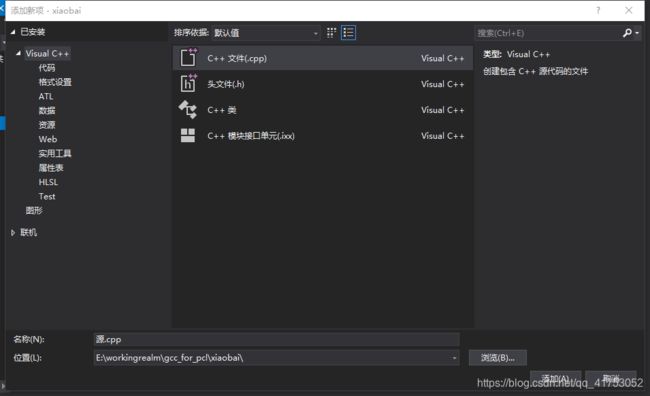
- 新建.cpp文件
源文件右键–>添加–>新建项–>选C++
- 选择自己平台的32位/64位
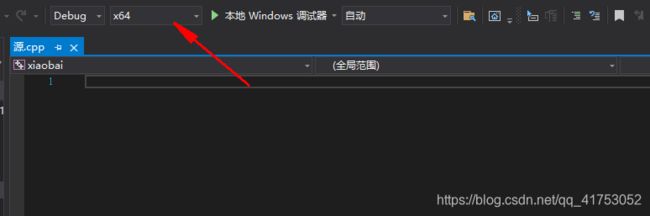
- 自己编个Hello world,测试一下,点
绿三角运行。
#include 安装PCL库
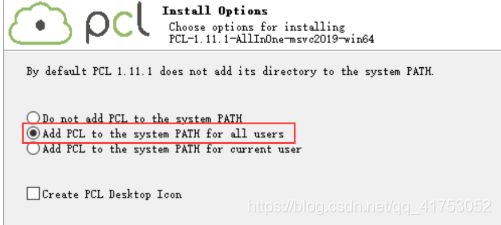
- 执行PCL-1.11.1-AllInOne-msvc2019-win64.exe
过程中要勾选添加环境变量。
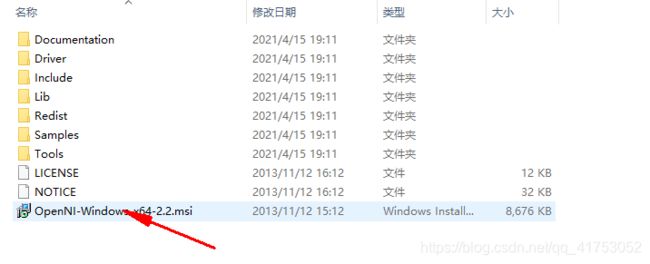
- OpenNI2安装路径的矫正
OpenNI2会默认安装到C盘。
D:...\PCL 1.11.1\3rdParty\OpenNI2路径下:OpenNI-Windows-x64-2.2.msi为OpenNI2安装管理器,remove后重新安装到D:...\PCL 1.11.1\3rdParty\
- 将pcl-1.11.1-pdb-msvc2019-win64.zip解压缩,并将解压缩文件拷贝到
D:...\PCL 1.11.1\bin\文件夹下。
PCL库和win10//VS2019关联
就是添加一大堆环境变量
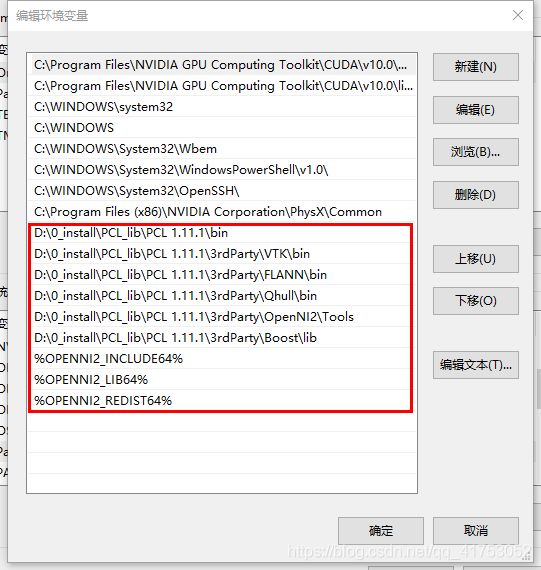
1、为了让win10认识PCL。
成功安装OPENNI2以后就能看到其环境变量。
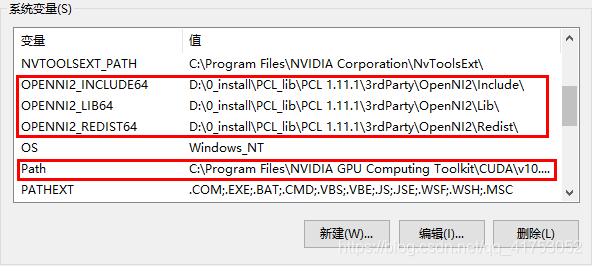
接下来我们配置Path,添加这么多环境变量。
2、为了让vs2019认识PCL。
如果想为了以后的项目方便属性配置,请先翻到本节结尾,一看便知。
-
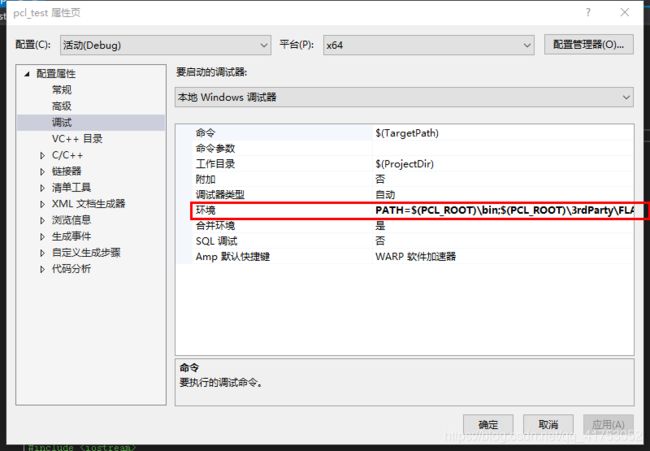
项目–>属性

-
调试:
PATH=$(PCL_ROOT)\bin;$(PCL_ROOT)\3rdParty\FLANN\bin;$(PCL_ROOT)\3rdParty\OpenNI2\Tools\bin;$(PCL_ROOT)\3rdParty\Qhull\bin;$(PCL_ROOT)\3rdParty\VTK\bin
-
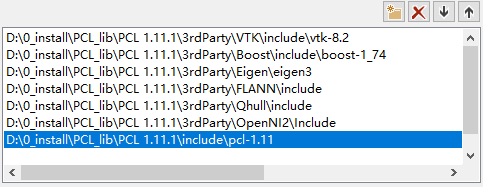
VC++目录
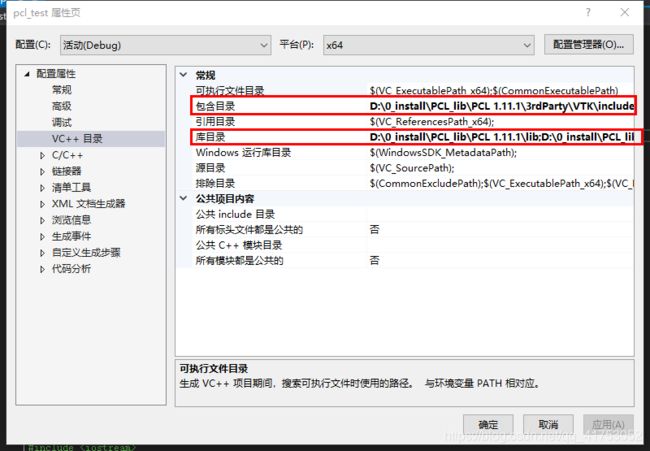
包含目录:
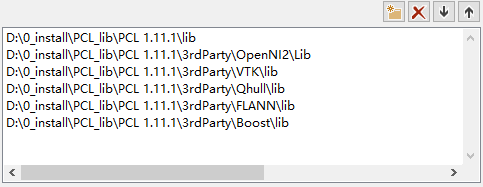
库目录:
-
C/C++ -->常规
-
预处理
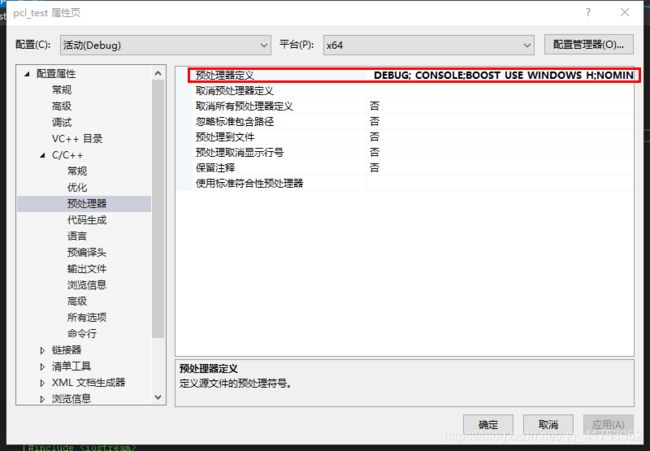

-
语言
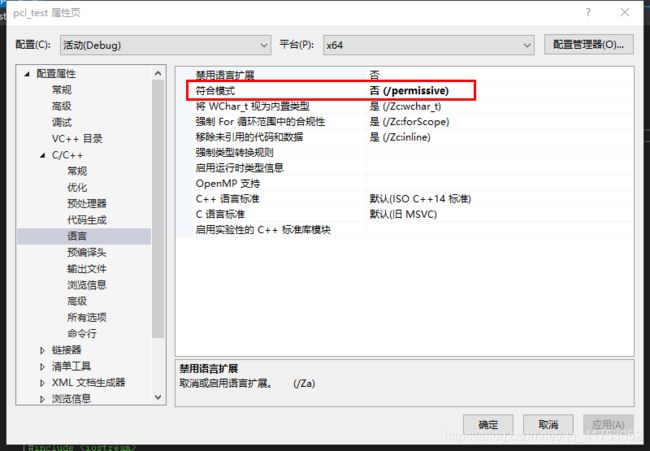
-
链接器–>输入
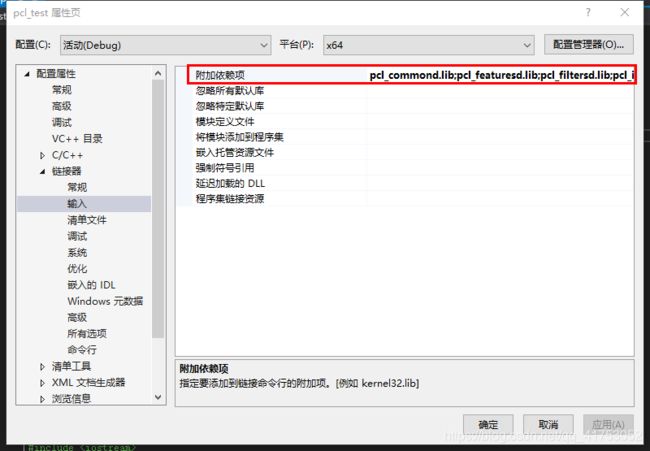
Debug下的依赖项,文件名末尾带d即为debug下的库文件:
pcl_commond.lib
pcl_featuresd.lib
pcl_filtersd.lib
pcl_iod.lib
pcl_io_plyd.lib
pcl_kdtreed.lib
pcl_keypointsd.lib
pcl_mld.lib
pcl_octreed.lib
pcl_outofcored.lib
pcl_peopled.lib
pcl_recognitiond.lib
pcl_registrationd.lib
pcl_sample_consensusd.lib
pcl_searchd.lib
pcl_segmentationd.lib
pcl_stereod.lib
pcl_surfaced.lib
pcl_trackingd.lib
pcl_visualizationd.lib
vtkChartsCore-8.2-gd.lib
vtkCommonColor-8.2-gd.lib
vtkCommonComputationalGeometry-8.2-gd.lib
vtkCommonCore-8.2-gd.lib
vtkCommonDataModel-8.2-gd.lib
vtkCommonExecutionModel-8.2-gd.lib
vtkCommonMath-8.2-gd.lib
vtkCommonMisc-8.2-gd.lib
vtkCommonSystem-8.2-gd.lib
vtkCommonTransforms-8.2-gd.lib
vtkDICOMParser-8.2-gd.lib
vtkDomainsChemistry-8.2-gd.lib
vtkDomainsChemistryOpenGL2-8.2-gd.lib
vtkdoubleconversion-8.2-gd.lib
vtkexodusII-8.2-gd.lib
vtkexpat-8.2-gd.lib
vtkFiltersAMR-8.2-gd.lib
vtkFiltersCore-8.2-gd.lib
vtkFiltersExtraction-8.2-gd.lib
vtkFiltersFlowPaths-8.2-gd.lib
vtkFiltersGeneral-8.2-gd.lib
vtkFiltersGeneric-8.2-gd.lib
vtkFiltersGeometry-8.2-gd.lib
vtkFiltersHybrid-8.2-gd.lib
vtkFiltersHyperTree-8.2-gd.lib
vtkFiltersImaging-8.2-gd.lib
vtkFiltersModeling-8.2-gd.lib
vtkFiltersParallel-8.2-gd.lib
vtkFiltersParallelImaging-8.2-gd.lib
vtkFiltersPoints-8.2-gd.lib
vtkFiltersProgrammable-8.2-gd.lib
vtkFiltersSelection-8.2-gd.lib
vtkFiltersSMP-8.2-gd.lib
vtkFiltersSources-8.2-gd.lib
vtkFiltersStatistics-8.2-gd.lib
vtkFiltersTexture-8.2-gd.lib
vtkFiltersTopology-8.2-gd.lib
vtkFiltersVerdict-8.2-gd.lib
vtkfreetype-8.2-gd.lib
vtkGeovisCore-8.2-gd.lib
vtkgl2ps-8.2-gd.lib
vtkglew-8.2-gd.lib
vtkGUISupportMFC-8.2-gd.lib
vtkhdf5-8.2-gd.lib
vtkhdf5_hl-8.2-gd.lib
vtkImagingColor-8.2-gd.lib
vtkImagingCore-8.2-gd.lib
vtkImagingFourier-8.2-gd.lib
vtkImagingGeneral-8.2-gd.lib
vtkImagingHybrid-8.2-gd.lib
vtkImagingMath-8.2-gd.lib
vtkImagingMorphological-8.2-gd.lib
vtkImagingSources-8.2-gd.lib
vtkImagingStatistics-8.2-gd.lib
vtkImagingStencil-8.2-gd.lib
vtkInfovisCore-8.2-gd.lib
vtkInfovisLayout-8.2-gd.lib
vtkInteractionImage-8.2-gd.lib
vtkInteractionStyle-8.2-gd.lib
vtkInteractionWidgets-8.2-gd.lib
vtkIOAMR-8.2-gd.lib
vtkIOAsynchronous-8.2-gd.lib
vtkIOCityGML-8.2-gd.lib
vtkIOCore-8.2-gd.lib
vtkIOEnSight-8.2-gd.lib
vtkIOExodus-8.2-gd.lib
vtkIOExport-8.2-gd.lib
vtkIOExportOpenGL2-8.2-gd.lib
vtkIOExportPDF-8.2-gd.lib
vtkIOGeometry-8.2-gd.lib
vtkIOImage-8.2-gd.lib
vtkIOImport-8.2-gd.lib
vtkIOInfovis-8.2-gd.lib
vtkIOLegacy-8.2-gd.lib
vtkIOLSDyna-8.2-gd.lib
vtkIOMINC-8.2-gd.lib
vtkIOMovie-8.2-gd.lib
vtkIONetCDF-8.2-gd.lib
vtkIOParallel-8.2-gd.lib
vtkIOParallelXML-8.2-gd.lib
vtkIOPLY-8.2-gd.lib
vtkIOSegY-8.2-gd.lib
vtkIOSQL-8.2-gd.lib
vtkIOTecplotTable-8.2-gd.lib
vtkIOVeraOut-8.2-gd.lib
vtkIOVideo-8.2-gd.lib
vtkIOXML-8.2-gd.lib
vtkIOXMLParser-8.2-gd.lib
vtkjpeg-8.2-gd.lib
vtkjsoncpp-8.2-gd.lib
vtklibharu-8.2-gd.lib
vtklibxml2-8.2-gd.lib
vtklz4-8.2-gd.lib
vtklzma-8.2-gd.lib
vtkmetaio-8.2-gd.lib
vtkNetCDF-8.2-gd.lib
vtkogg-8.2-gd.lib
vtkParallelCore-8.2-gd.lib
vtkpng-8.2-gd.lib
vtkproj-8.2-gd.lib
vtkpugixml-8.2-gd.lib
vtkRenderingAnnotation-8.2-gd.lib
vtkRenderingContext2D-8.2-gd.lib
vtkRenderingContextOpenGL2-8.2-gd.lib
vtkRenderingCore-8.2-gd.lib
vtkRenderingExternal-8.2-gd.lib
vtkRenderingFreeType-8.2-gd.lib
vtkRenderingGL2PSOpenGL2-8.2-gd.lib
vtkRenderingImage-8.2-gd.lib
vtkRenderingLabel-8.2-gd.lib
vtkRenderingLOD-8.2-gd.lib
vtkRenderingOpenGL2-8.2-gd.lib
vtkRenderingVolume-8.2-gd.lib
vtkRenderingVolumeOpenGL2-8.2-gd.lib
vtksqlite-8.2-gd.lib
vtksys-8.2-gd.lib
vtktheora-8.2-gd.lib
vtktiff-8.2-gd.lib
vtkverdict-8.2-gd.lib
vtkViewsContext2D-8.2-gd.lib
vtkViewsCore-8.2-gd.lib
vtkViewsInfovis-8.2-gd.lib
vtkzlib-8.2-gd.lib
Release下的依赖项:
pcl_common.lib
pcl_features.lib
pcl_filters.lib
pcl_io.lib
pcl_io_ply.lib
pcl_kdtree.lib
pcl_keypoints.lib
pcl_ml.lib
pcl_octree.lib
pcl_outofcore.lib
pcl_people.lib
pcl_recognition.lib
pcl_registration.lib
pcl_sample_consensus.lib
pcl_search.lib
pcl_segmentation.lib
pcl_stereo.lib
pcl_surface.lib
pcl_tracking.lib
pcl_visualization.lib
vtkChartsCore-8.2.lib
vtkCommonColor-8.2.lib
vtkCommonComputationalGeometry-8.2.lib
vtkCommonCore-8.2.lib
vtkCommonDataModel-8.2.lib
vtkCommonExecutionModel-8.2.lib
vtkCommonMath-8.2.lib
vtkCommonMisc-8.2.lib
vtkCommonSystem-8.2.lib
vtkCommonTransforms-8.2.lib
vtkDICOMParser-8.2.lib
vtkDomainsChemistry-8.2.lib
vtkDomainsChemistryOpenGL2-8.2.lib
vtkdoubleconversion-8.2.lib
vtkexodusII-8.2.lib
vtkexpat-8.2.lib
vtkFiltersAMR-8.2.lib
vtkFiltersCore-8.2.lib
vtkFiltersExtraction-8.2.lib
vtkFiltersFlowPaths-8.2.lib
vtkFiltersGeneral-8.2.lib
vtkFiltersGeneric-8.2.lib
vtkFiltersGeometry-8.2.lib
vtkFiltersHybrid-8.2.lib
vtkFiltersHyperTree-8.2.lib
vtkFiltersImaging-8.2.lib
vtkFiltersModeling-8.2.lib
vtkFiltersParallel-8.2.lib
vtkFiltersParallelImaging-8.2.lib
vtkFiltersPoints-8.2.lib
vtkFiltersProgrammable-8.2.lib
vtkFiltersSelection-8.2.lib
vtkFiltersSMP-8.2.lib
vtkFiltersSources-8.2.lib
vtkFiltersStatistics-8.2.lib
vtkFiltersTexture-8.2.lib
vtkFiltersTopology-8.2.lib
vtkFiltersVerdict-8.2.lib
vtkfreetype-8.2.lib
vtkGeovisCore-8.2.lib
vtkgl2ps-8.2.lib
vtkglew-8.2.lib
vtkGUISupportMFC-8.2.lib
vtkhdf5-8.2.lib
vtkhdf5_hl-8.2.lib
vtkImagingColor-8.2.lib
vtkImagingCore-8.2.lib
vtkImagingFourier-8.2.lib
vtkImagingGeneral-8.2.lib
vtkImagingHybrid-8.2.lib
vtkImagingMath-8.2.lib
vtkImagingMorphological-8.2.lib
vtkImagingSources-8.2.lib
vtkImagingStatistics-8.2.lib
vtkImagingStencil-8.2.lib
vtkInfovisCore-8.2.lib
vtkInfovisLayout-8.2.lib
vtkInteractionImage-8.2.lib
vtkInteractionStyle-8.2.lib
vtkInteractionWidgets-8.2.lib
vtkIOAMR-8.2.lib
vtkIOAsynchronous-8.2.lib
vtkIOCityGML-8.2.lib
vtkIOCore-8.2.lib
vtkIOEnSight-8.2.lib
vtkIOExodus-8.2.lib
vtkIOExport-8.2.lib
vtkIOExportOpenGL2-8.2.lib
vtkIOExportPDF-8.2.lib
vtkIOGeometry-8.2.lib
vtkIOImage-8.2.lib
vtkIOImport-8.2.lib
vtkIOInfovis-8.2.lib
vtkIOLegacy-8.2.lib
vtkIOLSDyna-8.2.lib
vtkIOMINC-8.2.lib
vtkIOMovie-8.2.lib
vtkIONetCDF-8.2.lib
vtkIOParallel-8.2.lib
vtkIOParallelXML-8.2.lib
vtkIOPLY-8.2.lib
vtkIOSegY-8.2.lib
vtkIOSQL-8.2.lib
vtkIOTecplotTable-8.2.lib
vtkIOVeraOut-8.2.lib
vtkIOVideo-8.2.lib
vtkIOXML-8.2.lib
vtkIOXMLParser-8.2.lib
vtkjpeg-8.2.lib
vtkjsoncpp-8.2.lib
vtklibharu-8.2.lib
vtklibxml2-8.2.lib
vtklz4-8.2.lib
vtklzma-8.2.lib
vtkmetaio-8.2.lib
vtkNetCDF-8.2.lib
vtkogg-8.2.lib
vtkParallelCore-8.2.lib
vtkpng-8.2.lib
vtkproj-8.2.lib
vtkpugixml-8.2.lib
vtkRenderingAnnotation-8.2.lib
vtkRenderingContext2D-8.2.lib
vtkRenderingContextOpenGL2-8.2.lib
vtkRenderingCore-8.2.lib
vtkRenderingExternal-8.2.lib
vtkRenderingFreeType-8.2.lib
vtkRenderingGL2PSOpenGL2-8.2.lib
vtkRenderingImage-8.2.lib
vtkRenderingLabel-8.2.lib
vtkRenderingLOD-8.2.lib
vtkRenderingOpenGL2-8.2.lib
vtkRenderingVolume-8.2.lib
vtkRenderingVolumeOpenGL2-8.2.lib
vtksqlite-8.2.lib
vtksys-8.2.lib
vtktheora-8.2.lib
vtktiff-8.2.lib
vtkverdict-8.2.lib
vtkViewsContext2D-8.2.lib
vtkViewsCore-8.2.lib
vtkViewsInfovis-8.2.lib
vtkzlib-8.2.lib
切记:Debug 和Release的文件务必分开分别插入对应的Debug和Release模式,否则就会造成程序编码的某个环节不能正常运行。
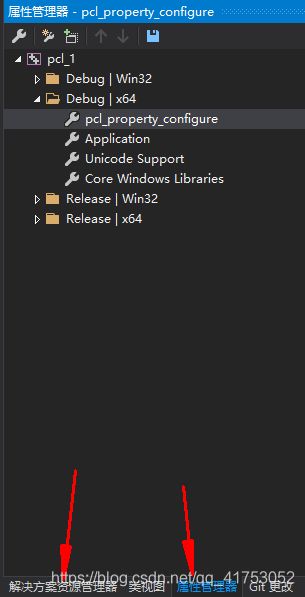
如何一次配置终身受益: 来看视图
解决方案管理器:只是针对这个项目配置属性,没有传承。
属性管理器:配置属性后能生成.props文件,是可以有传承的。
选择Debug/Release/Win32/x64属于自己项目的文件,新建一个属性文件,就像刚才上边儿配置pcl库的属性一样,到时候在新项目的属性管理器导入现在的这个属性文件即可。
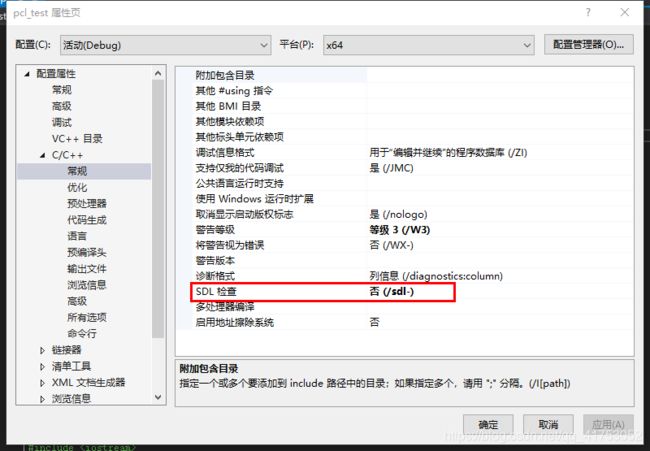
(一定要是项目->属性而非调试->属性)
遇到的问题就是每次SDL检查都要重新设置为否。
(这里不详细说明了)
3、运行rabbit
如果在项目运行中出现找不到OpenNI2.dll的问题,则找到…\PCL 1.11.1\3rdParty\OpenNI2\Redist文件夹下的OpenNI2.dll,并将它拷贝到当前项目的主文件夹下,该问题即解决。
#include”hello world“运行成功!!!
二、cmake编译改进的pcl库
引言
经过了几个月的pcl学习,已经对分割和提取算法有了足够的了解,但是pcl库自带的功能函数已经不能满足了,极大地限制了对自己想法的复现,遂花费一天时间学习了pcl库的编译,本文针对pcl1.11.1源码编译,对于其他版本,可举一反三。
准备工作
参考博文:win10下编译pcl1.10.1源码进行安装
- pcl 1.11.1安装包AllinOne+vs2019
- pcl 1.11.1源码 from gitee
- cmake-3.20.1-windows-x86_64
cmake生成工程
1、该方法的前提是完成了pcl库和vs2019的安装和配置(见上一章),安装完后我们就是为了获得第三方库,pcl编译是需要这几个库的支持的。

2、安装cmake,cmake版本不能太低,否则不支持vs2019的编译器。安装好之后开始进入界面,调试生成工程。
-
让cmake知道pcl源码在哪
-
给它安排生成工程的路径
-
添加环境变量CMAKE_PERFIX_PATH

-
添加的环境变量就是给cmake指明库的路径

-
点击configure,选择vs2019版本编译器,我想它报错变红了,别慌小问题,勾选Grouped和Advanced为了给变量分类。
常见错误:
eigen需要添加路径到eigen3这一级;
boost需要到…3rdParty/Boost/include/boost-1_74这一级; -
出了错也没关系,毕竟机器是被设定好的,只要足够了解它,一切问题都能迎刃而解。
-
再次点击configure和generate,则会编译成功,即可Open Project,这样就生成了针对vs2019的pcl工程。
vs2019编译链接pcl工程
1、使用管理员权限打开此工程,因为生成的库默认放到了C盘。
右键ALL_BUILD,点击build,开始生成,接下来需要等待一段时间。

2、右键INSTALL,开始生成对应的库文件。
3、最后会在C盘生成需要用到的文件
使用编译好的库
方法一:上文中,假设我们自己修改了源码,给segmentation部分添加了改进的分割算法,需要找到4个文件放到原pcl安装目录对应位置并替换。
- pcl_segmentationd.lib静态库文件
- pz_supervoxel_clustering.h头文件
- pz_supervoxel_clustering.hpp模板文件
- pcl_segmentationd.dll动态库文件
方法二:将上述的生成文件全部替换原pcl安装目录对应文件。
注意:所有替换文件都要养成备份的好习惯哦!
接下来就能愉快地该算法了!!!
三、ubuntu18.04使用PCL库
参考博文:
Ubuntu18.04 亲测安装PCL1.11
下载链接:
- for pcl–>tags–>PCL 1.11.1

- for ensensor
- codemeter
准备安装包:
pcl-pcl-1.11.1.tar.gz //PCL安装包
metslib-0.5.3.tgz //for pcl compile 忘了从哪下载的了,自己找去
//以下两个安装包,对版本应该没要求,尽量高版本
ensenso-sdk-3.0.311-x64.deb //视觉啥啥啥
codemeter_7.20.4402.501_amd64.deb //视觉啥啥啥
==大概过程:==先为PCL库安装各种依赖,最后配置安装PCL库。
前提,安装各种依赖包
//使用了阿里源
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui //本人理解就是cmake==configure make 配置生成Makefile
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.9 libflann-dev #这里改成1.9
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk7.1-qt libvtk7.1 libvtk7-qt-dev # 用于视觉显示
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install openjdk-8-jdk openjdk-8-jre
# 用于视觉显示
sudo apt-get install libopenni-dev
sudo apt-get install libopenni2-dev
# 把下载好的包放在此目录
sudo dpkg -i ensenso-sdk-2.2.147-x64.deb
sudo dpkg -i codemeter_6.80.3312.500_amd64.deb
# 安装metslib
tar xzvf metslib-0.5.3.tgz
cd metslib-0.5.3
./configure
make -j4
sudo make install
开始安装PCL库
tar -vxzf pcl-pcl-1.11.1.tar.gz
cd pcl-pcl-1.11.1
mkdir release
cd release
cmake -DCMAKE_BUILD_TYPE=None -DCMAKE_INSTALL_PREFIX=/usr \ -DBUILD_GPU=ON-DBUILD_apps=ON -DBUILD_examples=ON \ -DCMAKE_INSTALL_PREFIX=/usr .. //默认配置生成Makefile
make -j4 //此编译过程需要耐心等待,如果内存不足,会出现error killed 等吓人的错误
sudo make install //安装 ,相反卸载就是uninstall
==问题:==编译时,需要很多内存,但是4G的内存还是不足。
==解决方法:==为linux系统添加一个大大的交换内存空间swap,本人一开始1G不行,2G不行,后来直接向ROM申请了16G交换内存空间。具体操作如下,
相关命令:
# 使swapfile停止被占用
sudo swapoff /swapfile
# 重新分配swapfile的大小
#count的大小就是增加的swap空间的大小,4096是块大小,所以空间大小是bs*count=4GB
sudo dd if=/dev/zero of=/swapfile bs=4096 count=1M
#该目录权限
sudo chmod 0600 /swapfile
# 把这个文件格式化成swap空间
sudo mkswap /swapfile
# 使用刚才创建的swap空间
sudo swapon /swapfile
******
然后就能跑程序了。。。
******
# 关闭并删除交换分区,一般就留着吧
sudo swapoff /swapfile
sudo rm /swapfile
#查看当前内存使用情况:
free -m
测试
1、测试pcl库中pcd文件
cd ../pcl-pcl-1.11.1/test
pcl_viewer office1.pcd //执行该条命令有显示就说明已经安装完成
#如果没有安装pcl_viewer那就安装呗
2、测试自己的cpp
mkdir test_pcl
cd test_pcl
touch test_pcl.cpp
touch CMakeLists.txt
mkdir build
cd build
cmake ..//配置生成Makefile
make //编译文件
./test_pcl//运行程序
test_pcl.cpp内容如下:
#include CMakeLists.txt内容如下:注意里边有自己新建的路径、文件名字,要对应上。
cmake_minimum_required(VERSION 2.6)
project(test_pcl)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(test_pcl test_pcl.cpp)
target_link_libraries (test_pcl ${PCL_LIBRARIES})
install(TARGETS test_pcl RUNTIME DESTINATION bin)
VScode的头文件路径和库路径
- c_cpp_properties.json 负责告诉vscode各种头文件路径。
{
"configurations": [
{
"name": "Linux",
"includePath": [
"${workspaceFolder}/**",
"${workspaceFolder}",
"/usr/include/pcl-1.11",
"/usr/include",
"/usr/include/vtk-7.1",
"/usr/include/qhull",
"/usr/include/flann",
"/usr/include/boost",
"/usr/include/eigen3",
"/usr/include/eigen3/Eigen/",
"/usr/include/x86_64-linux-gnu/sys"
],
"defines": [],
"browse":{
"path":[
"/usr/include",
"/usr/include/pcl-1.11"
]
},
"compilerPath": "/usr/bin/gcc",
"cStandard": "c11",
"cppStandard": "c++17",
"intelliSenseMode": "gcc-x64"
}
],
"version": 4
}
- lauch.json 负责设置编译链接运行工具。
{
"version": "0.2.0",
"configurations": [
{
"name": "(gdb) Launch",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/${fileBasenameNoExtension}.out",
"miDebuggerPath": "/usr/bin/gdb",
"preLaunchTask":"build",
"args": [],
"stopAtEntry": false,
"cwd": "${workspaceFolder}",
"environment": [],
"externalConsole": true,
"MIMode": "gdb",
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
]
}
]
}
- tasks.json 负责制定编译后生成文件的路径,类似于Makefile。
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks":[ // 可以有多个参数
{
"label": "build", // 编译任务名
"type": "shell", // 编译任务的类型,通常为shell/process类型
"command": "g++", // 编译命令
"args":[
"-g",
"${workspaceFolder}/${fileBasename}", // include path指令
"-I", "/usr/include/pcl-1.11",
"-I", "/usr/include/eigen3",
"-I", "/usr/include/vtk-7.1",
"-I", "/usr/include/qhull",
"-I", "/usr/include/flann",
"-I", "/usr/include/boost",
// lib 库文件地址
"-L", "/usr/local/lib",
"-l", "pcl_io",
"-l", "pcl_visualization",
"-l", "pcl_common",
"-l", "vtkFiltering",
"-l", "vtkCommon",
"-l", "vtkRendering",
"-l", "vtkGraphics",
"-L", "/usr/include/x86_64-linux-gnu",
"-l", "boost_system",
"-o", // 生成指定名称的可执行文件
"${workspaceFolder}/${fileBasenameNoExtension}.out"
],
"group": {
"kind": "build",
"isDefault": true
}
},
{
"label": "cmakebuild",
"type": "shell",
"command": "cd build && cmake ../ && make",
"args": []
}
]
}
以上这些,有的路径可能和库版本有关,一般没有大的改动,自行尝试。
心得:要明确,vscode是个宇宙无敌的编辑器,给他指定路径,它都能给你搜索到。