百元级树莓派pico四足机器狗设计(并联腿结构)持续更新
一.硬件选取
1.1 主板
主板用的是树莓官方的微控制器raspberry pi pico。这个板子的接口还是蛮丰富的,这个小项目完全够用。但是这个处理器有个缺点就是缺少WIFI和蓝牙,不过可以外接蓝牙模块解决。这个板子目前的货量充足,20几元便可以买到一个不带排针的板子。下面就是这个板子的正反面以及接口类型的示意图。板子上有一颗LED灯珠以及温度传感器,使用micro use接口供电。注意在编写程序的过程中要用数据线而非充电线,运行既定程序的时候使用充电线连接就好了。
买这个板子最好带着排针,再买点杜邦线,直接插拔相对来说方便一些,不过同样的可能因布线太乱影响美观。不带排针直接焊接也可,但是相对麻烦一点。最后,PCB打板就不至于了,毕竟项目太小。

1.2 舵机
舵机是动力源,每条腿包含两个驱动舵机。舵机使用SG90与MG90均可。这两款都是数字舵机,MG90的扭矩更大,寿命更长,价格也同样是SG90的二倍。不过两款舵机均可胜任,SG90在5元左右,MG90在10元左右。这里需要八颗舵机,可以根据需求自行选择(左SG,右MG)。
每个舵机有三根线,红棕色的两根线为电源线,红正(+)棕负(-),黄色的是信号线。在将舵机连接到驱动板的时候,直接对应着颜色拔插即可。
还有要注意的一点是,舵机为180°舵机,这点很重要。

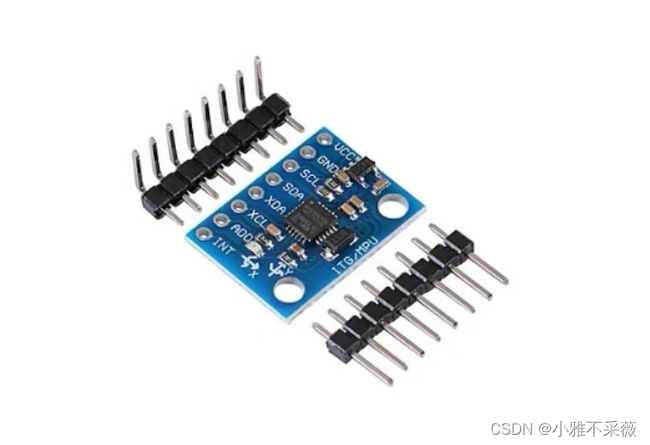
1.3 陀螺仪
选取了最常见的MPU6050,用于读取系统的姿态数据,用于系统平衡稳定的保持等任务。市价6元左右。
1.4 舵机驱动板
这里不能用树莓派PICO直接驱动舵机,一来是电流电压的问题容易造成树莓派PICO的损坏,二来是这玩意儿也没那么多接口,不能同时控制八颗舵机。所以这里用了个16路的舵机控制板PCA9685,也就是可以用这个板子一次性控制16个舵机,所以对于这个项目就绰绰有余了。需要格外注意的是,不要用树莓派PICO给PCA9685供电,PCA9685需要外接电源来驱动。
如下图,最左边的一排排针用于连接主板,用里面的4根线,GND,VCC,SCL,SDA即可。将这些接口连接到树莓派PICO上对应的位置即可,下面也会给出接线的示意图。最下面黄黑红(不是黄飞鸿)相间的一堆是舵机的连接接口,共有16个,对着舵机的接口的颜色连接即可。绿色的突起用于外接电源供电,在底部印有正负的字样,可不要连接错了。这个外接电源使用3.7—6.0V的锂电池均可。

PCA9685驱动代码如下所示。使用类Servos下面的position()函数来驱动舵机运动,position()函数的输入包含两个参数,一个是舵机的编号(0-15),另一个则是舵机转动的角度(0°-180°)。这段代码来自于哔哩哔哩UP。
import pca9685
import math
class Servos:
def __init__(self, i2c, address=0x40, freq=50, min_us=600, max_us=2400,
degrees=180):
self.period = 1000000 / freq
self.min_duty = self._us2duty(min_us)
self.max_duty = self._us2duty(max_us)
self.degrees = degrees
self.freq = freq
self.pca9685 = pca9685.PCA9685(i2c, address)
self.pca9685.freq(freq)
def _us2duty(self, value):
return int(4095 * value / self.period)
def position(self, index, degrees=None, radians=None, us=None, duty=None):
span = self.max_duty - self.min_duty
if degrees is not None:
duty = self.min_duty + span * degrees / self.degrees
elif radians is not None:
duty = self.min_duty + span * radians / math.radians(self.degrees)
elif us is not None:
duty = self._us2duty(us)
elif duty is not None:
pass
else:
return self.pca9685.duty(index)
duty = min(self.max_duty, max(self.min_duty, int(duty)))
self.pca9685.duty(index, duty)
def release(self, index):
self.pca9685.duty(index, 0)
1.5 舵机驱动板外接电源
板子上注明6V以内的电源均可,又考虑到重量什么的,最好还是用锂电池,3.7V的锂电池就可以驱动。这里也可以用5V的充电宝供电,只不过说相当于外接电源,不能直接扛着充电宝罢了。
1.6 总结
并联腿结构的四足较为稳定,这个项目开发所需要的配件基本如上所示。价格大约为20(主板) + 40(舵机) + 20(舵机驱动板) + 10(陀螺仪) + 10(电池) +20(3D打印外壳)= 120。当然还有一些其他的开销,比如说一些用于连接固定组件的胶水,螺丝。或者是连接传感器用到的杜邦线等。若要添加蓝牙模块等,还需另备。
二.结构设计与组装
2.1 整体装配图
这里使用Creo软件画了个简单的并联腿结构模型,下面是装配图的示意,打印出来将零件装上即可。
这玩意比较露骨,只有单纯的架子和四条腿。身子类似于一个矩形结构,长180mm,宽100mm,还是比较小巧的。


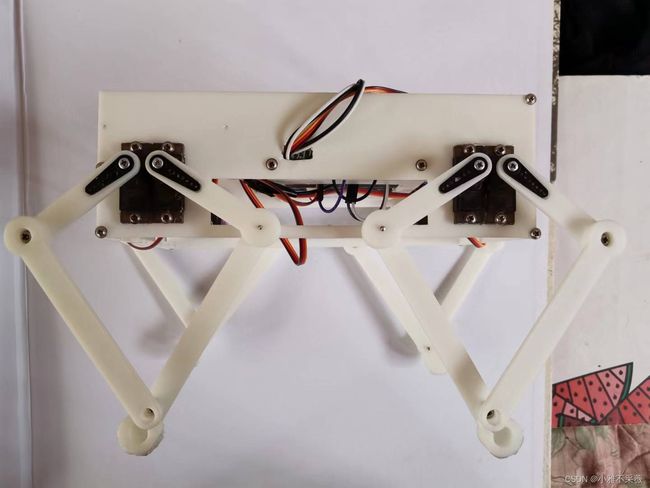
2.2 单腿结构示意与实体
这玩意重点就是腿部的设计,一条腿由两个舵机来驱动。单腿上的三个关节都是可动的。为了保持稳定在腿部的末端都拓宽了表面积,以此来改善支撑。单腿的装配图如下所示。从最右边的子图中可以很清楚的看到装配的细节示意。关节的连接使用舵机螺丝包中同款的自攻螺丝来安装。

实体的样子如下所示,黑色的为舵机摇臂,足端有毛边的感觉是因为涂了热熔胶,采取这种笨方法来增大摩擦力。

2.3 组装示意
拿到所有的零件之后,组装就变得很简单了,最起码比孩子玩的积木简单多了,现在小孩的积木直接能治低血压。
将舵机并列装到装配孔里面,然后用螺丝拧上就好了,螺丝就是自攻螺丝,舵机里自带那种,不过每个舵机只带一颗,需要自行购买一些,很便宜,买那种长的螺丝,不要买错了。装好舵机之后,就要安装大腿了。安装的时候需要先将舵机复位,这里是将舵机调节到九十度。这里可以看到,一条腿包括四部分,即两个小腿,两个大腿。将小腿安装到舵机上时,要尽量保持水平,即将小腿按照平行于矩形的长边安装。要是实在没理解什么意思,可以参考2.1 整体装配图的第一个图的腿部的安装方式。
这个安装的过程,由于舵机摇臂齿轮匹配的问题,很难将小腿按照很标准的水平安置,多少会有10°以内的偏差。不过也不用担心,后续用程序矫正即可。另外,很重要的一点,同一侧两条腿足端的安装朝向相反,安装的时候多注意一下。
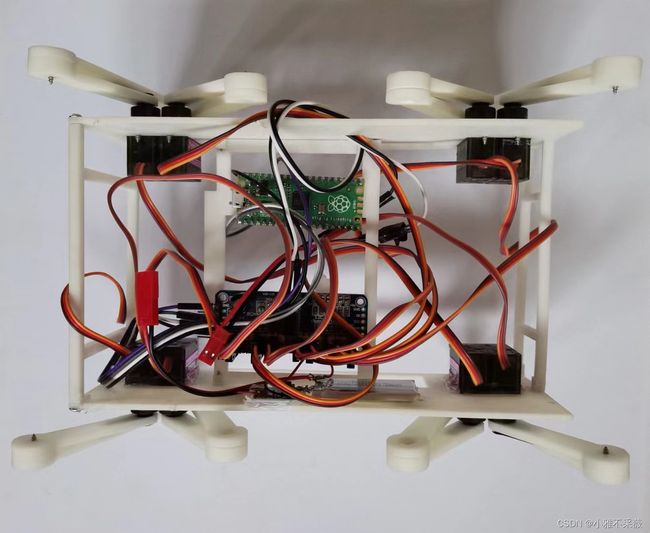
2.4 硬件连接示意图
包含两个传感器的连接示意图,接口选择其实很灵活,对应连接即可。
连接完了之后大概就是这么个样子,如下图。因为我没有好好布线,所以看起来乱糟糟的,规整一下就可以了。
三.MicroPython环境搭建
这个项目使用MicroPython开发。这个语言非常容易上手,基本就是一了解就会的那种。买了那个板子之后,会给你一个教程,安装一个python的开发环境Thonny,然后使用micro usb数据线连接板子和电脑,就可以进行软件的开发工作了。卖家会给你提供全套的操作步骤,以及软件供你下载使用,在这里就不再过多赘述了。弄好之后就是这个样子,就可以进行编程工作了。

四.运动学正逆解
运动学正解与运动学逆解是一组相反的概念。
4.1 运动学正解
运动学正解意味着已知关节的角度,然后去估算末端执行器的位姿。拿这个并联腿机器狗作为例子来说,运动学正解意味着我人为给关节驱动舵机一个角度,然后舵机响应这个命令,转动到指定的角度,然后腿部也会随着舵机的运动而运动,使得足端能移动到一定的位置。但是运动学正解在这里不作为重点。
4.2 运动学逆解
还是以这个项目为例子,运动学逆解意味着我已知足端的一个位置,然后根据这个位置的坐标(x,y)去计算出两个关节驱动舵机应该转动的角度。通过这种方式,可以任意的规划一条合法的轨迹然后驱动腿部沿着这个轨迹来运动。相应的,运动学逆解也是实现狗子行走转向的重点。
五.并联腿运动学逆解实现
5.1 模型等价
从2.2的单腿结构示意中可以看到,两个舵机并列放置。因此可以看到两个舵机的转轴之间有一个间距,在下图中体现为“L“,这个间距在模型等价的过程中不能被忽略。

根据图中粉色线条表示,可以将该腿部等价为一个动态的五边形模型。当然这个五边形不是严格意义上的,因为有可能出现内凹的感觉,但是依然是五条边。接受了这个无奈的现实,就可以着手运动学逆解的规划了。
将整个模型倒立过来,舵机在与AB平行的位置为90°,可在以B点为旋转轴向上向下各自移动90度的范围。从图可以看到,D点为单腿的足端,也是我们要规划运动的最终点。
从D点向A、F、B点做虚轴,这些个轴是不存在的。使用L4、L5、L6将五边形分解为4个不同的三角形。

5.2 运动学逆解求解
已知: 足底D坐标(x,y),L1、L2、L3。
求解: Angle1、Angle2、Angle3、Angle4。
方法: 等价出这个模型之后,求解就变得很容易了。先根据D的坐标(x,y)以及L3的长度由勾股定理可以轻松的得到L4、L5、L6的长度。

注意点F是(0,0)点,向右为X轴正方向。 得到L4、L5、L6的长度之后,结合已知的条件,使用余弦定理,可以得到Angle1、Angle2、Angle3、Angle4的角度。Angle1的求解如下所示,其余三个角度方法均相同。

因为结构与舵机转角的限制,舵机从水平的90°开始旋转,但不能转到0°,同样向下也不能转到180°。结合模型分析,可以得到两个舵机分别的转角数据A1、A2,如下所示。
![]()
5.3 逆解代码实现
import math
import time
class Leg():
def __init__(self,l1,l2):
self.name = "leg"
self.version = 1.0
self.x1 = l1
self.x2 = l2
self.len1 = 4.5
self.len2 = 8.0
def Angle(self,x,y):
l5 = (x**2+y**2)**0.5
l4 = ((x-self.x1)**2 + y**2)**0.5
l6 = ((x-self.x2)**2 + y**2)**0.5
cosa1 = (l4**2 + self.len1**2 - self.len2**2)/(2*l4*self.len1+0.01)
cosa2 = (self.x1**2 + l4**2 - l5**2)/(2*l4*self.x1+0.01)
cosa4 = (l6**2 + self.x1**2 - l5**2)/(2*self.x1*l6+0.01)
cosa3 = (self.len1**2 + l6**2 - self.len2**2)/(2*self.len1*l6+0.01)
degree1 = math.degrees(math.acos(cosa1))
degree2 = math.degrees(math.acos(cosa2))
degree3 = math.degrees(math.acos(cosa3))
degree4 = math.degrees(math.acos(cosa4))
angle1 = 270 - degree1 - degree2
angle2 = 270 - degree3 - degree4
return int(angle1),int(angle2)
l = Leg(0.7,-0.7)
one,two = l.Angle(0,9.0)
六.行走转向步态规划
没病走两步。
6.1 行走步态设计
下图为一种四足直行的步态设计。首先图中的每一个蓝色方块代表一条腿的安放位置。以最左边的图形为例,右上角为1号腿,右下角为2号腿。同样的,左上角为3号腿,左下角为4号腿。1、2号两条腿为前腿,其余的两条为后腿。

足端的轨迹为摆线加直线的设计。即足端运行的过程分为两部分,包含两个相位,一部分是轨迹为摆线的运动相,另一部分是轨迹为直线的支撑相。
在单腿的每一个运动周期中,都包含了两个状态。一是处于运动相的运动状态,另一则为支撑相的支撑状态。处于对角线上的两条腿的运动状态相同。在这里假设1、4号腿先运动。则当1、4号腿处于运动相的时候,2、3腿则处于支撑相。随着时间推移,1、4号腿结束运动相进而进入支撑相的运动状态中,此时2、3腿也结束支撑相进入运动相的状态。重复这个过程,如图所示,即可以实现行走步态。
行走步态的实现流程如下。
1. 生成一条摆线轨迹,并生成一条直线,与所形成的摆线相连,组成一条闭合的弧线。取一个特定的周期,自首至尾在圆弧上取一定数量的点,并拿到所有点的(x,y)坐标。将这个坐标与对应的偏置量合并,作为行走轨迹上的坐标点。
2.将所得到的坐标放入运动学逆解的函数之中,会返回两个逆解的角度值,这两个角度为对应的伺服器应当运动的值。
3. 根据上图所给出的步态驱动对应的腿,使得同组腿与异组腿交替运动。
4. 重复1-3操作,实现行走步态。
6.2 转向步态设计
转向步态与前进后退步态基本上无异。在这里提及一个词,即差速。与车的转向原理不同,这个智能体的运动方式更类似于履带式的机械,如坦克,挖掘机等。他们采取差速的方式,可进行各种角度甚至是原地的转向。如下图所述,以向右转向为例。

1、4腿先迈出,但是1号腿迈出的步幅更大,4号腿移动的距离很小。但重点是仍要保持腿部的运动的相位相同,方能保持稳定。之后2、3腿迈出,但是3号腿迈出的步幅大于2号腿。同样的,重复这个过程,利用差速的方式,可以实现右转。同理,左转亦是如此。
6.3 行走转向代码设计
第一段代码用于生成摆线的坐标点。
代码出现问题,近期更新