基于优化的规划方法 - 数值优化基础 Frenet和笛卡尔的转换 问题建模 实现基于QP的路径优化算法
本文讲解基于优化的规划算法,将从以下几个维度讲解:数值优化基础、Frenet与Cartesian的相互转换、问题建模OSQP
1 数值优化基础
1.1 优化的概念
一般优化问题公式:

f ( x ) f(x) f(x):目标/成本函数
x x x:决策变量
S S S:可行域 | 约束集

Example:
A点是最优值

全局最优和局部最优的概念:

1.2 无约束优化
当函数f可微,要成为局部最小值的必要条件是 ▽ f ( x ) = 0 \bigtriangledown f(x)=0 ▽f(x)=0
用梯度方法解决无约束优化问题
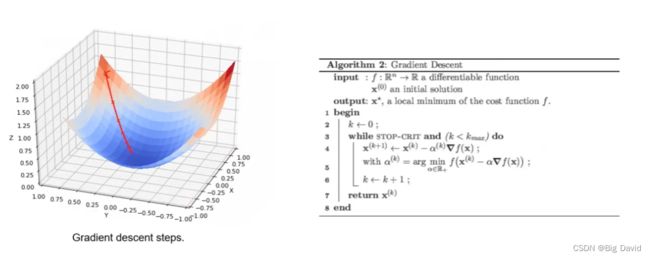
(1)梯度下降法
(2)牛顿法
(3)高斯牛顿法
(4)Levenberg-Marquardt 法
通用框架
(1)迭代公式: x ( k + 1 ) = x ( k ) + α ( k ) △ x ( k ) x^{(k+1)}=x^{(k)}+\alpha^{(k)}\bigtriangleup x^{(k)} x(k+1)=x(k)+α(k)△x(k),采取一步后, f ( x ( k + 1 ) ) < f ( x ( k ) ) f(x^{(k+1)})
△ x \bigtriangleup x △x:下降方向
α \alpha α:步长
(2)重复迭代步骤,直到满足停止标准
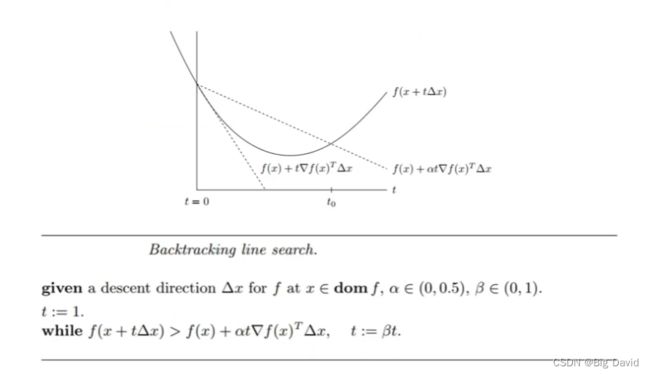
步长通过线性搜索来决定

非精确线性搜索方法:回溯法
1.2.1用梯度方法解决无约束优化问题 - 梯度下降法:一阶方法,只用到一阶信息
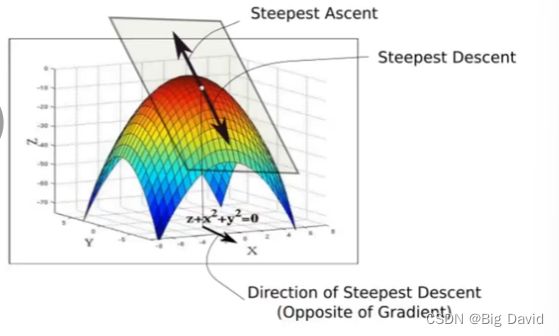
(1)梯度下降法依赖于成本函数的值再负梯度方向上下降最快。(对于可微成本函数)
(2)使用迭代框架,从起点 x 0 x_0 x0开始,每个步骤都朝着负梯度的方向前进
1.2.2用梯度方法解决无约束优化问题 - 牛顿法:二阶方法,用到二阶信息

通过不断二次函数逼近原函数去找到局部最优
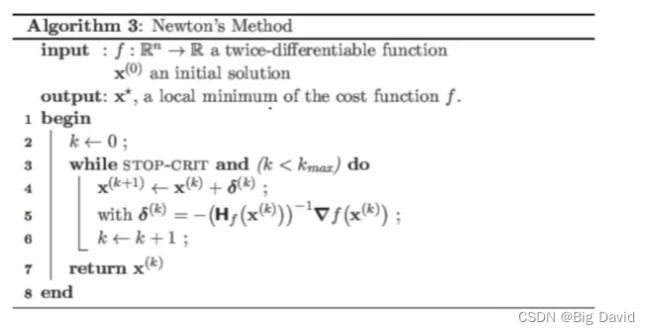
与梯度下降不一样的地方就是上图的第五行
用牛顿法要求函数二阶可导
1.2.3 用梯度方法解决无约束优化问题 - 高斯 - 牛顿法
高斯-牛顿法是一种优化算法,用于最小化成本函数,该函数写成平方和(最小二乘)

(1)考虑向量值函数的最小化

(2)对 F F F做一阶泰勒展开

(3)解决以下的问题得到 δ \delta δ
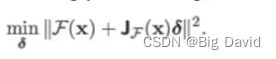
(4)Gauss-Newton 搜索方向 δ = − ( J T J ) − 1 J T F \delta =-(J^TJ)^{-1}J^TF δ=−(JTJ)−1JTF

1.2.4 用梯度方法解决无约束优化问题 - L-M法
(1)对于高斯-牛顿法,可能会发生 J T J J^TJ JTJ是奇异矩阵或者是近似程度不高的病态条件。此时下降方向的稳定性较差,导致算法发散
(2)LM法在梯度下降和高斯牛顿法之间通过参数 λ \lambda λ的影响进行调整


1.3 二次规划QP
凸函数和凸集

凸优化问题:
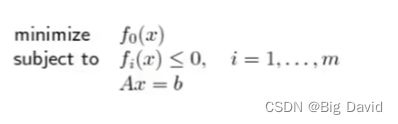
f 0 , f 1 , . . . , f m f_0,f_1,...,f_m f0,f1,...,fm都是凸函数
(1)可行域是凸的
(2)局部最优解就是全局最优解
(3)理论上和实践上,相对好解决

凸优化问题的层次结构:
LP:线性规划
QP:二次规划
SOCP:二阶锥规划
SDP:半正定规划
CP:锥规划
QP

P:半正定矩阵
二次规划的所有约束都是线性的

图中 P P P就是一个可行集,就是 G x ≤ h Gx≤h Gx≤h
QP求解器
OSQP

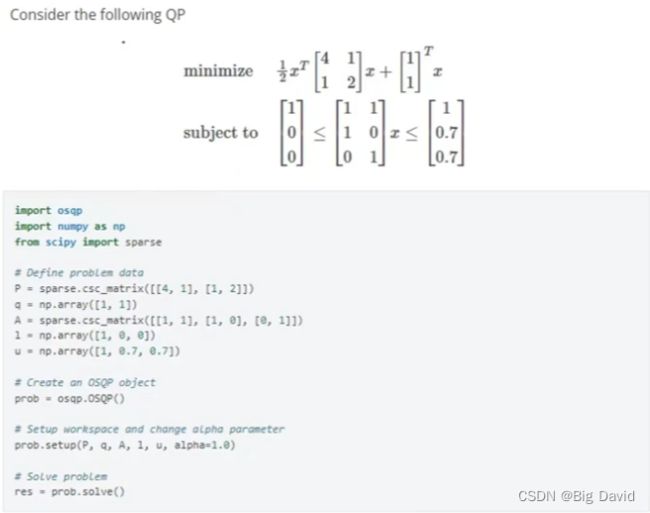
就是把 P , q , A , l , u P,q,A,l,u P,q,A,l,u矩阵全部定义好,调用求解器
1.4 非线性规划 NLP

目标函数和约束都是非凸的
求解NLP的方法:
(1)序列二次规划 SQP:把复杂问题拆分成一个一个小的QP问题,依次求解每个QP问题,通过外层迭代找到复杂问题的最优解
(2)内点法 IPM:先找到可行集的内点,从这个点开始迭代,迭代过程中不断去搜索可行域达到最终满足约束的最优解
非线性优化求解器 Ipopt
Ipopt(内点优化器):用于大规模非线性优化的开源软件包。可用于解决如下形式的一般非线性规划问题

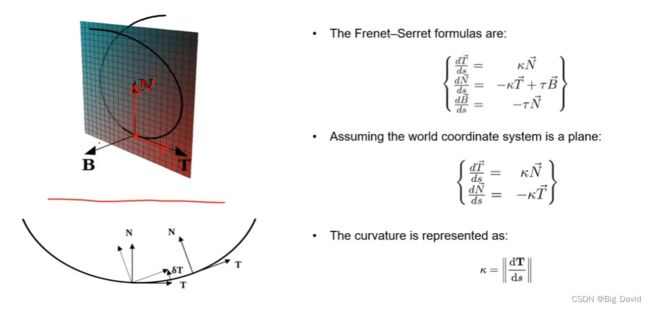
2 Frenet与Cartesian的相互转换
路径优化在Frenet坐标系下

状态转换(Frenet | Cartesian)


Frenet坐标系
找投影点 ( x r , y r ) (x_r,y_r) (xr,yr)
利用点乘法
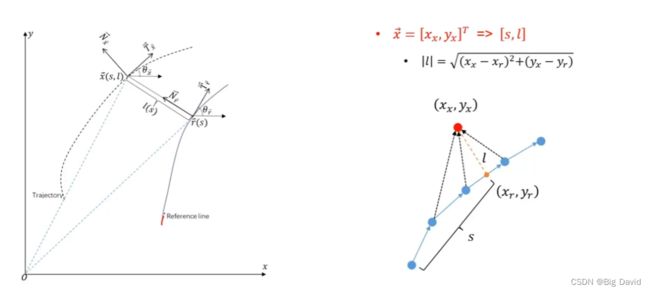
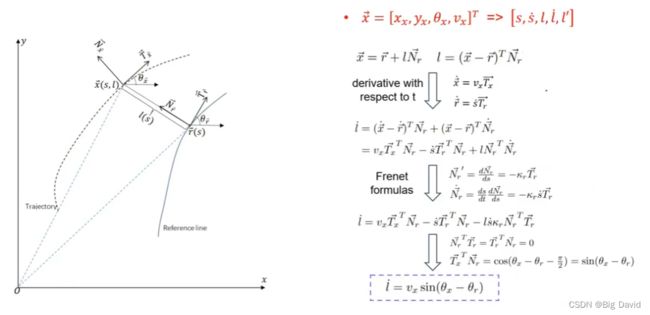



总结:
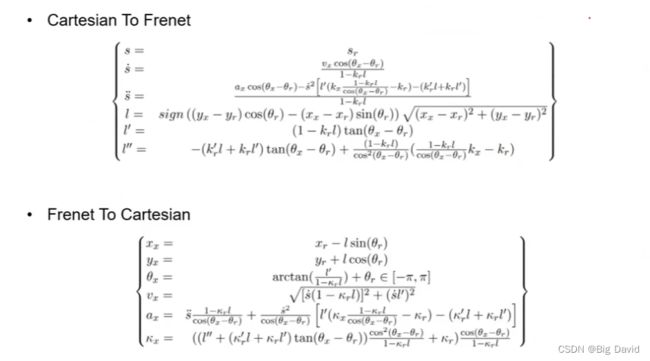
https://github.com/ApolloAuto/apollo/blob/master/modules/common/math/cartesian_frenet_conversion.cc

3 问题建模
(1)定义优化变量

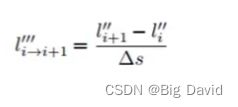
根据空间参数离散化路径函数 l ( s ) l(s) l(s)到某个分辨率 Δ s \Delta s Δs,并用这些离散点控制路径的形状

使用恒定的三阶导数连接连续的离散点
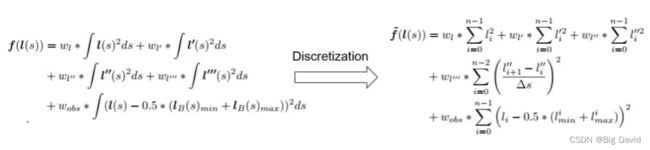
(2)最优性建模

1 无碰撞:与环境中的障碍物不相撞
2 最小横向偏差:在不影响安全性的情况下尽可能靠近车道中心线
3 最小的横向运动:横向运动尽可能平缓
4 最大障碍物距离:保持对环境中障碍物的距离
(3)约束的设计
1、连续性约束
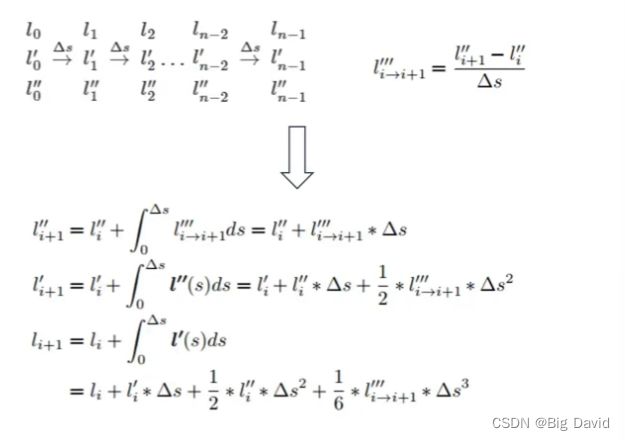
2、初始状态约束

3、状态约束

4、最大曲率约束

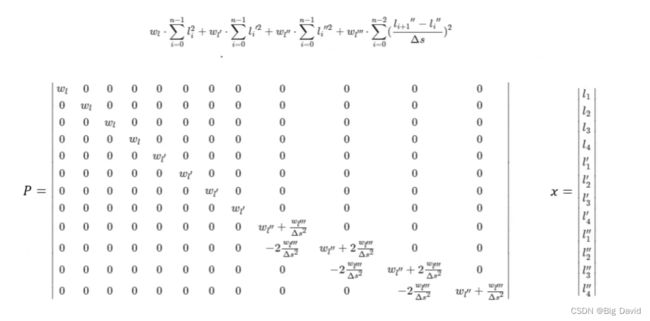
问题建模

Use OSQP

给定四个点 P 1 、 P 2 、 P 3 、 P 4 P_1、P_2、P_3、P_4 P1、P2、P3、P4
1、定义优化变量:
x = [ l 1 l 2 l 3 l 4 l 1 ′ l 2 ′ l 3 ′ l 4 ′ l 1 ′ ′ l 2 ′ ′ l 3 ′ ′ l 4 ′ ′ ] x=\begin{bmatrix} l_1\\ l_2\\ l_3\\ l_4\\ l_1^{'}\\ l_2^{'}\\ l_3^{'}\\ l_4^{'}\\ l_1^{''}\\ l_2^{''}\\ l_3^{''}\\ l_4^{''} \end{bmatrix} x= l1l2l3l4l1′l2′l3′l4′l1′′l2′′l3′′l4′′
2、Cost function设计

3、约束的设计


