ubuntu安装ros
本文主要介绍ros的安装过程和在安装过程中出现的问题的一些解决方法,关于ros的介绍和应用,请查看我的其他博文。
- ros与ubuntu版本对应关系,ros有很多版本其与ubuntu的一些版本相互对应,如下图:
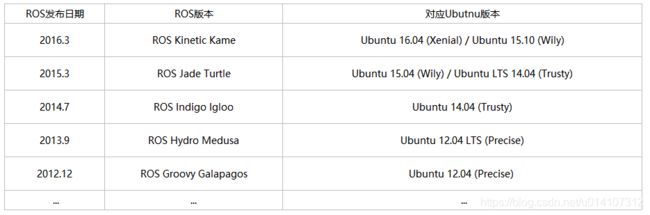
例如,你是ubuntu16.04则应该安装Kinetic。
- ros依赖python版本是python2.7,安装的时候查看一下python版本
ros@ros-laptop:~$ python -V
Python 2.7.12- 如果不是2.7版本,则需要将python版本修改为python2.7
ros@ros-laptop:~$ cd /usr/bin/
ros@ros-laptop:/usr/bin$ sudo rm python
ros@ros-laptop:/usr/bin$ sudo ln -s /usr/bin/python2.7 python安装
本文是基于ubuntu16.04版本进行安装的
通过安装包安装
- 获取ros源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'- 建立秘钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116sudo apt-get update-->安装Desktop-Full 版本,执行:
sudo apt-get install ros-kinetic-desktop-full-->安装Desktop 版本,执行:
sudo apt-get install ros-kinetic-desktop-->安装ROS-Base版本,执行:
sudo apt-get install ros-kinetic-ros-base- 初始化rosdep
sudo rosdep init
rosdep update- 设置环境变量
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc- 安装依赖包
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential通过源码安装(建议)
sudo apt-get install python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential
sudo rosdep init
rosdep update- 创建工作区
mkdir ~/ros_catkin_ws
cd ~/ros_catkin_ws- 获取核心包
-->Desktop-Full Install,执行:
rosinstall_generator desktop_full --rosdistro kinetic --deps --wet-only --tar > kinetic-desktop-full-wet.rosinstall
wstool init -j8 src kinetic-desktop-full-wet.rosinstall-->Desktop Install:
rosinstall_generator desktop --rosdistro kinetic --deps --wet-only --tar > kinetic-desktop-wet.rosinstall
wstool init -j8 src kinetic-desktop-wet.rosinstall-->ROS-Comm:
rosinstall_generator ros_comm --rosdistro kinetic --deps --wet-only --tar > kinetic-ros_comm-wet.rosinstall
wstool init -j8 src kinetic-ros_comm-wet.rosinstall##注意 -j8 如果你是四核处理器 请改成 -j4
##如果中途获取中断,可以使用下面命令继续更新:
wstool update -j 4 -t src- 解析依赖:
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y- 编译工作空间:
./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release- 初始化环境变量
source ~/ros_catkin_ws/install_isolated/setup.bash
参考链接:
http://wiki.ros.org/kinetic/Installation
安装过程有什么问题欢迎评论,博主会及时更新~