Robotics Toolbox :(1)建立机器人模型
转载自这里
机器人学工具箱(Robotics Toolbook for Matlab) 是matlab中专门用于机器人仿真的工具箱,在机器人建模、轨迹规划、控制、可视化方面使用非常方便。
创建机器人的两个最重要的函数是:Link和Seriallink
Link类
Link 对象包括连杆的各种属性:运动学参数、惯性张量、电机、传递矩阵等
Link 的类函数:
A :关节传动矩阵
RP :关节类型
friction : 摩擦力
nofriction : 摩擦为0
dyn : 显示动力学参数
islimit:检测关节变量是否超出范围
isrevolute : 检测关节是否为转动关节
isprismatic : 检测关节是否为移动关节
display : 显示D-H矩阵
char : 转化为字符串
Link 的类属性(读/写):
theta:D-H参数
d:D-H参数
a:D-H参数
alpha:D-H参数
sigma: 默认0,旋转关节;1,移动关节
mdh: 默认0,标准D-H;1,改进D-H
offset:关节变量偏移量
qlim:关节变量范围
m: 质量
r: 质心
I: 惯性张量
B: 粘性摩擦
Tc: 静摩擦
G: 减速比
Jm: 转子惯量
例如:定义连杆
L =link('d',1.2,'a', 0.3,'alpha',pi/2,'offset',pi/2,‘mdh’,1,'qlim',[-pi,pi],'m',0.5,'r',[0 0 0.05],'I',[0.001 0 0; 0 0.001 0; 0 0 0.05]);
b1=isrevolute(L); %判读L是否为旋转连杆
b2= L.d; %读取L连杆的长度Seriallink 类
Seriallink 的类函数:
类函数比较多,包括显示机器人、动力学、逆动力学、雅可比等,用的最多的是:SerialLink 和 plot,用来显示机器人
R=SerialLink(links, options);
R.plot(theta);Seriallink 的类属性(读/写):
links :连杆向量
gravity :重力加速度
base :基座标系
tool:与基座标系的变换矩阵
qlim :关节极限位置
offset :关节偏移量
name :机器人的名字
manuf :制造者的名字
comment: 注释
Seriallink 的类属性(读):
n :关节数
config: 关节配置,如‘RRRRRR’
mdh :D-H矩阵类型
theta :D-H参数
d :D-H参数
a :D-H参数
alpha: D-H参数
建立机器人
首先用Link建立连杆,再用SerialLink建立机器人,最后用plot显示机器人。
clear;
clc;
L1 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L2 = Link('d', 0, 'a', 0.5, 'alpha', 0,'offset',pi/2);
L3 = Link('d', 0, 'a', 0, 'alpha', pi/2,'offset',pi/4);
L4 = Link('d', 1, 'a', 0, 'alpha', -pi/2);
L5 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L6 = Link('d', 1, 'a', 0, 'alpha', 0);
b=isrevolute(L1); %Link 类函数
robot=SerialLink([L1,L2,L3,L4,L5,L6]); %SerialLink 类函数
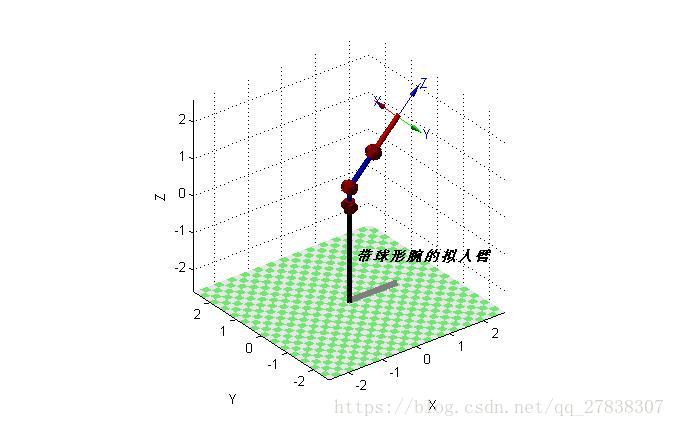
robot.name='带球形腕的拟人臂';
robot.comment='飘零过客';
robot.display(); %Link 类函数
theta=[0 0 0 0 0 0];
robot.plot(theta); %SerialLink 类函数在 Matlab 的命令行窗口中显示 display 的
robot =
带球形腕的拟人臂 (6 axis, RRRRRR, stdDH, fastRNE)
飘零过客;
+---+-----------+-----------+-----------+-----------+-----------+
| j | theta | d | a | alpha | offset |
+---+-----------+-----------+-----------+-----------+-----------+
| 1| q1| 0| 0| 1.571| 0|
| 2| q2| 0| 0.5| 0| 1.571|
| 3| q3| 0| 0| 1.571| 0.7854|
| 4| q4| 1| 0| -1.571| 0|
| 5| q5| 0| 0| 1.571| 0|
| 6| q6| 1| 0| 0| 0|
+---+-----------+-----------+-----------+-----------+-----------+
grav = 0 base = 1 0 0 0 tool = 1 0 0 0
0 0 1 0 0 0 1 0 0
9.81 0 0 1 0 0 0 1 0
0 0 0 1 0 0 0 1 plot 的图形为:
参数说明
display 显示的结果中,除了D-H参数外,还有三个矩阵,grav,base,tool (在10.2版本中未出现)
grav,重力加速度矢量
base,基座标的齐次矩阵,正常情况下,竖直方向Z轴(看重力加速度矢量),如上图所示。但有些机器人的基座标系竖直方向不是Z轴(如下图,两连杆机械臂),基座标矩阵就是机械臂的基座标系与plot图的默认坐标系之间的变换关系。如果不改变base坐标,那么就要改变grav矢量的值了。
tool,指工具坐标系和末端连杆的坐标系之间的变换矩阵。一般情况下是重合的。

参考
[1] Peter Corke,Robotics Toolbox for MATLAB Release 9(Version,9.10),2015.02
[2] P.I. Corke, Robotics, Vision & Control: Fundamental Algorithms in MATLAB.Springer, 2011.