【YOLO系列】YOLOv1详解:模型结构、损失函数、训练方法及代码实现
YOLOv1(You Only Look Once):实时目标检测的革命性突破
✨ motivation
在目标检测领域,传统方法如R-CNN系列存在计算冗余、推理速度慢的问题。2016年提出的YOLO(You Only Look Once)首次实现端到端单阶段检测,将检测速度提升至45 FPS(Faster R-CNN仅7 FPS),彻底改变了实时目标检测的格局。其核心思想是将检测视为回归问题,实现"看一眼即知全貌"的突破。
数据处理
采用PASCAL VOC 2007+2012数据集:
- 图像预处理:统一缩放至448×448448 \times 448448×448,RGB三通道归一化
- 标签编码:将真值框编码为S×S×(B×5+C)S \times S \times (B \times 5 + C)S×S×(B×5+C)张量
其中S=7S=7S=7(网格数),B=2B=2B=2(每个网格预测框数),C=20C=20C=20(类别数) - 数据增强:随机缩放(±20%)、平移(最大偏移0.2倍图像尺寸)、HSV色彩扰动
模型结构
YOLOv1(You Only Look Once)是一种实时目标检测模型,由Joseph Redmon等人在2015年提出。其核心思想是将目标检测视为一个回归问题,一次性预测图像中的边界框(bounding boxes)和类别概率。相比于传统的两阶段检测器(如R-CNN),YOLOv1具有速度快、端到端训练的优势。下面我将详细介绍其模型结构,分步解释关键组件。
1. 整体架构概述
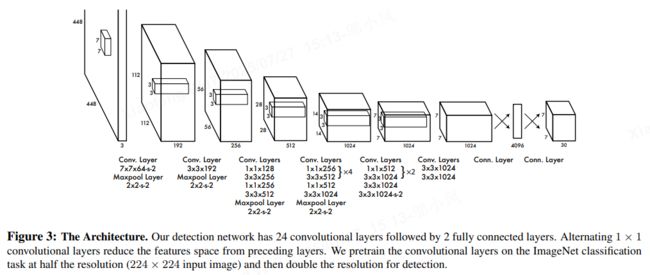
YOLOv1基于卷积神经网络(CNN),采用了一种简化的架构,类似于GoogLeNet,但针对目标检测任务进行了优化。模型输入为固定尺寸的图像(通常为448×448像素),输出是一个7×7的网格张量。每个网格单元负责预测多个边界框和类别信息。整个网络由24个卷积层和2个全连接层组成,结构紧凑,便于实时推理。

2. 网络层结构详解
YOLOv1的CNN部分主要用于特征提取,其层级结构如下:
- 卷积层:前20层使用卷积操作提取图像特征。这些层包括:
- 多个卷积块,每个块包含卷积、激活(ReLU)和池化操作。
- 卷积核尺寸逐渐减小,从7×7到3×3,以捕获多尺度特征。
- 使用步长(stride)和填充(padding)控制特征图尺寸。
- 全连接层:最后2层是全连接层,用于将特征图展平并生成最终预测。
- 第一全连接层:将特征图转换为4096维向量。
- 第二全连接层:输出7×7×30的张量(即1470维),这是模型的最终输出。
网络参数总结:
- 输入尺寸:448×448×3(RGB图像)。
- 输出尺寸:7×7×30(张量)。
- 总参数量:约45百万,模型轻量,适合实时应用。
3. 输出张量解释
YOLOv1的输出是一个7×7×30的三维张量,其中:
- 7×7网格:将输入图像划分为7×7的网格单元(grid cell)。每个单元对应图像中的一个区域(约64×64像素),负责检测中心点落在该区域的目标。
- 每个网格单元的预测:包含两部分:
- 边界框预测:每个网格单元预测2个边界框(bounding boxes)。每个边界框由5个值表示:
- 中心坐标 (x,y)(x, y)(x,y):相对于网格单元的相对位置,范围在[0,1]。
- 宽度 www 和高度 hhh:相对于整个图像的尺寸,归一化到[0,1]。
- 置信度(confidence score):表示该框包含目标的可能性,定义为 P(object)×IOUP(\text{object}) \times \text{IOU}P(object)×IOU,其中IOU(交并比)是预测框与真实框的重叠度。数学上,置信度公式为:
confidence=P(object)⋅IOUpredtruth \text{confidence} = P(\text{object}) \cdot \text{IOU}_{\text{pred}}^{\text{truth}} confidence=P(object)⋅IOUpredtruth
这里,P(object)P(\text{object})P(object) 是目标存在的概率,IOUpredtruth\text{IOU}_{\text{pred}}^{\text{truth}}IOUpredtruth 是预测框与真实框的IOU。
- 类别概率预测:每个网格单元预测20个类别的条件概率(基于PASCAL VOC数据集)。条件概率表示为 P(classi∣object)P(\text{class}_i | \text{object})P(classi∣object),即在目标存在的前提下,该目标属于类别 iii 的概率。
- 边界框预测:每个网格单元预测2个边界框(bounding boxes)。每个边界框由5个值表示:
因此,每个网格单元的输出维度为:2个框 × 5个值(x,y,w,h,confidence) + 20个类别概率 = 30维。整个输出张量可表示为:
输出∈R7×7×30 \text{输出} \in \mathbb{R}^{7 \times 7 \times 30} 输出∈R7×7×30
4. 预测机制工作流程
YOLOv1的预测过程分为三步:
- 图像划分:输入图像被划分为7×7网格。每个网格单元独立处理局部特征。
- 边界框生成:对于每个网格单元,模型预测2个边界框。这些框通过非极大值抑制(NMS)后处理去除冗余,保留置信度最高的框。
- 类别分配:每个网格单元计算类别概率分布。最终检测时,边界框的类别由网格单元的类别概率和置信度共同决定:
- 具体公式:某个边界框属于类别 iii 的得分为:
scorei=P(classi∣object)×confidence \text{score}_i = P(\text{class}_i | \text{object}) \times \text{confidence} scorei=P(classi∣object)×confidence
得分最高的类别被分配给该框。
- 具体公式:某个边界框属于类别 iii 的得分为:
5. 优势与局限性总结
YOLOv1的结构简单高效,实现了端到端训练,推理速度快(可达45帧/秒)。然而,其网格划分机制可能导致小目标检测精度较低,因为每个网格单元仅预测固定数量的框。后续版本(如YOLOv2/v3)通过改进锚框(anchor boxes)和多尺度预测优化了这些不足。
⚖️ 损失函数
YOLOv1损失函数详细介绍
YOLOv1(You Only Look Once version 1)是一种单阶段目标检测模型,其核心创新是将目标检测视为一个回归问题,直接在图像网格上预测边界框(bounding box)和类别概率。损失函数的设计是YOLOv1的关键,它通过加权组合多个误差项来平衡位置、置信度和分类任务,确保模型高效训练。损失函数采用平方误差(Sum-Squared Error)形式,因为它易于优化,但通过权重系数解决了不同任务间的不平衡问题。下面我将逐步分解YOLOv1损失函数的各个部分。
损失函数总体结构
YOLOv1损失函数是一个加权和,包含五个主要部分:
- 位置损失:用于预测边界框的坐标(中心点x,yx, yx,y和尺寸w,hw, hw,h)。
- 置信度损失:用于预测边界框是否包含对象(objectness)。
- 分类损失:用于预测对象所属类别。
整体损失函数公式如下:
L=Lcoord+Lconf+LclassL = L_{\text{coord}} + L_{\text{conf}} + L_{\text{class}}L=Lcoord+Lconf+Lclass
其中:
- LcoordL_{\text{coord}}Lcoord 是位置损失。
- LconfL_{\text{conf}}Lconf 是置信度损失。
- LclassL_{\text{class}}Lclass 是分类损失。
每个部分都涉及权重系数和指示函数,以处理不同情况(如有对象或无对象)。YOLOv1将图像划分为S×SS \times SS×S网格(通常S=7S=7S=7),每个网格单元预测BBB个边界框(通常B=2B=2B=2)。下面详细解释每个组件。
1. 位置损失(LcoordL_{\text{coord}}Lcoord)
位置损失负责优化边界框的坐标预测,包括中心点(x,y)(x, y)(x,y)和尺寸(w,h)(w, h)(w,h)。为了平衡不同尺寸边界框的误差,YOLOv1对宽度和高度使用平方根变换,以减少大尺寸框的误差影响。位置损失仅应用于“负责”检测对象的边界框(即与真实框IoU最高的预测框)。
公式:
Lcoord=λcoord∑i=0S2∑j=0B1ijobj[(xi−x^i)2+(yi−y^i)2]+λcoord∑i=0S2∑j=0B1ijobj[(wi−w^i)2+(hi−h^i)2]L_{\text{coord}} = \lambda_{\text{coord}} \sum_{i=0}^{S^2} \sum_{j=0}^{B} \mathbb{1}_{ij}^{\text{obj}} \left[ (x_i - \hat{x}_i)^2 + (y_i - \hat{y}_i)^2 \right] + \lambda_{\text{coord}} \sum_{i=0}^{S^2} \sum_{j=0}^{B} \mathbb{1}_{ij}^{\text{obj}} \left[ (\sqrt{w_i} - \sqrt{\hat{w}_i})^2 + (\sqrt{h_i} - \sqrt{\hat{h}_i})^2 \right]Lcoord=λcoordi=0∑S2j=0∑B1ijobj[(xi−x^i)2+(yi−y^i)2]+λcoordi=0∑S2j=0∑B1ijobj[(wi−w^i)2+(hi−h^i)2]
其中:
- 1ijobj\mathbb{1}_{ij}^{\text{obj}}1ijobj 是指示函数,当第iii个网格单元的第jjj个边界框负责检测对象时值为1(即该框与真实框的IoU最大),否则为0。
- xi,yi,wi,hix_i, y_i, w_i, h_ixi,yi,wi,hi 是预测值。
- x^i,y^i,w^i,h^i\hat{x}_i, \hat{y}_i, \hat{w}_i, \hat{h}_ix^i,y^i,w^i,h^i 是真实值(ground truth)。
- λcoord\lambda_{\text{coord}}λcoord 是位置损失的权重系数,通常设为5,以增强坐标误差的重要性(因为位置精度对检测任务至关重要)。
关键点:
- 中心点误差(xi−x^i)2+(yi−y^i)2(x_i - \hat{x}_i)^2 + (y_i - \hat{y}_i)^2(xi−x^i)2+(yi−y^i)2直接使用平方误差。
- 尺寸误差(wi−w^i)2+(hi−h^i)2(\sqrt{w_i} - \sqrt{\hat{w}_i})^2 + (\sqrt{h_i} - \sqrt{\hat{h}_i})^2(wi−w^i)2+(hi−h^i)2通过平方根处理,使得小尺寸框的误差更敏感(例如,预测wi=10w_i=10wi=10和真实w^i=1\hat{w}_i=1w^i=1时,误差较大;而wi=100w_i=100wi=100和w^i=91\hat{w}_i=91w^i=91时,误差较小)。
2. 置信度损失(LconfL_{\text{conf}}Lconf)
置信度损失用于预测边界框的“对象存在概率”(即置信度分数CiC_iCi,范围[0,1])。它分为两部分:
- 有对象损失:当边界框负责检测对象时,优化置信度接近1。
- 无对象损失:当边界框不负责对象时,优化置信度接近0(减少负样本的影响)。
公式:
Lconf=∑i=0S2∑j=0B1ijobj(Ci−C^i)2+λnoobj∑i=0S2∑j=0B1ijnoobj(Ci−C^i)2L_{\text{conf}} = \sum_{i=0}^{S^2} \sum_{j=0}^{B} \mathbb{1}_{ij}^{\text{obj}} (C_i - \hat{C}_i)^2 + \lambda_{\text{noobj}} \sum_{i=0}^{S^2} \sum_{j=0}^{B} \mathbb{1}_{ij}^{\text{noobj}} (C_i - \hat{C}_i)^2Lconf=i=0∑S2j=0∑B1ijobj(Ci−C^i)2+λnoobji=0∑S2j=0∑B1ijnoobj(Ci−C^i)2
其中:
- 1ijnoobj\mathbb{1}_{ij}^{\text{noobj}}1ijnoobj 是指示函数,当第iii个网格单元的第jjj个边界框不负责对象时值为1,否则为0(注意:1ijnoobj=1−1ijobj\mathbb{1}_{ij}^{\text{noobj}} = 1 - \mathbb{1}_{ij}^{\text{obj}}1ijnoobj=1−1ijobj)。
- CiC_iCi 是预测置信度。
- C^i\hat{C}_iC^i 是真实置信度(有对象时为1,无对象时为0)。
- λnoobj\lambda_{\text{noobj}}λnoobj 是无对象损失的权重系数,通常设为0.5,以减少负样本的梯度影响(因为图像中大部分网格不包含对象)。
关键点:
- 第一项∑1ijobj(Ci−C^i)2\sum \mathbb{1}_{ij}^{\text{obj}} (C_i - \hat{C}_i)^2∑1ijobj(Ci−C^i)2强制有对象框的置信度接近1。
- 第二项λnoobj∑1ijnoobj(Ci−C^i)2\lambda_{\text{noobj}} \sum \mathbb{1}_{ij}^{\text{noobj}} (C_i - \hat{C}_i)^2λnoobj∑1ijnoobj(Ci−C^i)2强制无对象框的置信度接近0,但权重较低(λnoobj=0.5\lambda_{\text{noobj}}=0.5λnoobj=0.5),避免无对象样本主导训练。
3. 分类损失(LclassL_{\text{class}}Lclass)
分类损失用于预测对象所属类别概率。每个网格单元预测一个条件概率分布p(c∣object)p(c|\text{object})p(c∣object),表示如果网格包含对象中心,则对象属于类别ccc的概率。损失仅应用于包含对象中心的网格单元。
公式:
Lclass=∑i=0S21iobj∑c=1C(pi(c)−p^i(c))2L_{\text{class}} = \sum_{i=0}^{S^2} \mathbb{1}_{i}^{\text{obj}} \sum_{c=1}^{C} (p_i(c) - \hat{p}_i(c))^2Lclass=i=0∑S21iobjc=1∑C(pi(c)−p^i(c))2
其中:
- 1iobj\mathbb{1}_{i}^{\text{obj}}1iobj 是指示函数,当第iii个网格单元包含对象中心时值为1,否则为0。
- pi(c)p_i(c)pi(c) 是预测的第ccc个类别的概率。
- p^i(c)\hat{p}_i(c)p^i(c) 是真实概率(one-hot编码,真实类别为1,其他为0)。
- CCC 是类别总数(如PASCAL VOC数据集有20类)。
关键点:
- 分类损失是平方误差,而非交叉熵,因为YOLOv1整体采用平方误差框架。
- 每个网格单元只预测一个类别分布(与边界框数BBB无关),因此损失基于网格单元而非边界框。
权重系数的意义
- λcoord=5\lambda_{\text{coord}} = 5λcoord=5:增加位置损失的权重,因为坐标误差对检测精度影响更大(例如,位置偏移可能导致误检)。
- λnoobj=0.5\lambda_{\text{noobj}} = 0.5λnoobj=0.5:降低无对象置信度损失的权重,因为图像中负样本(无对象区域)远多于正样本,防止负样本梯度淹没正样本。
损失函数特点总结
- 整体公式:结合上述部分,完整损失函数为:
L=λcoord∑i=0S2∑j=0B1ijobj[(xi−x^i)2+(yi−y^i)2+(wi−w^i)2+(hi−h^i)2]+∑i=0S2∑j=0B1ijobj(Ci−C^i)2+λnoobj∑i=0S2∑j=0B1ijnoobj(Ci−C^i)2+∑i=0S21iobj∑c=1C(pi(c)−p^i(c))2L = \lambda_{\text{coord}} \sum_{i=0}^{S^2} \sum_{j=0}^{B} \mathbb{1}_{ij}^{\text{obj}} \left[ (x_i - \hat{x}_i)^2 + (y_i - \hat{y}_i)^2 + (\sqrt{w_i} - \sqrt{\hat{w}_i})^2 + (\sqrt{h_i} - \sqrt{\hat{h}_i})^2 \right] + \sum_{i=0}^{S^2} \sum_{j=0}^{B} \mathbb{1}_{ij}^{\text{obj}} (C_i - \hat{C}_i)^2 + \lambda_{\text{noobj}} \sum_{i=0}^{S^2} \sum_{j=0}^{B} \mathbb{1}_{ij}^{\text{noobj}} (C_i - \hat{C}_i)^2 + \sum_{i=0}^{S^2} \mathbb{1}_{i}^{\text{obj}} \sum_{c=1}^{C} (p_i(c) - \hat{p}_i(c))^2L=λcoordi=0∑S2j=0∑B1ijobj[(xi−x^i)2+(yi−y^i)2+(wi−w^i)2+(hi−h^i)2]+i=0∑S2j=0∑B1ijobj(Ci−C^i)2+λnoobji=0∑S2j=0∑B1ijnoobj(Ci−C^i)2+i=0∑S21iobjc=1∑C(pi(c)−p^i(c))2 - 优点:通过权重平衡,解决了位置、置信度和分类任务的不平衡问题;平方误差简化了优化。
- 局限:平方误差对分类任务不是最优(后续版本如YOLOv2改用交叉熵),且对小对象检测不够鲁棒。
YOLOv1损失函数的设计体现了端到端回归的思想,使其在速度和精度上取得了平衡。训练时,该损失函数通过反向传播优化模型参数,实现高效的目标检测。
训练方法
- 优化器:SGD动量优化器(动量0.9)
- 学习率:分段衰减 lr=10−3→10−2→10−3→10−4lr = 10^{-3} \to 10^{-2} \to 10^{-3} \to 10^{-4}lr=10−3→10−2→10−3→10−4
- 批次大小:64
- 训练周期:135 epoch
- 正则化:Dropout (rate=0.5) + L2权重衰减(0.0005)
实验效果
在PASCAL VOC 2007测试集:
| 指标 | YOLOv1 | Faster R-CNN |
|---|---|---|
| mAP | 63.4% | 70.0% |
| FPS | 45 | 7 |
| 模型尺寸 | 约750MB | 约1.2GB |
核心优势:在保持AP50AP_{50}AP50达88%的同时,推理速度提升6倍以上!
关键代码
以下展示YOLOv1的关键实现代码(基于PyTorch框架),包含模型架构和损失函数的核心部分:
import torch
import torch.nn as nn
class YOLOv1(nn.Module):
def __init__(self, grid_size=7, num_boxes=2, num_classes=20):
super().__init__()
self.grid_size = grid_size
self.num_boxes = num_boxes
self.num_classes = num_classes
# 特征提取网络(简化版,原文使用24层卷积)
self.features = nn.Sequential(
nn.Conv2d(3, 64, 7, stride=2, padding=3),
nn.LeakyReLU(0.1),
nn.MaxPool2d(2, stride=2),
nn.Conv2d(64, 192, 3, padding=1),
nn.LeakyReLU(0.1),
nn.MaxPool2d(2, stride=2)
)
# 检测头(输出层)
self.detector = nn.Sequential(
nn.Linear(192 * grid_size * grid_size, 4096),
nn.LeakyReLU(0.1),
nn.Linear(4096, grid_size * grid_size * (num_classes + num_boxes * 5))
)
def forward(self, x):
x = self.features(x)
x = torch.flatten(x, 1)
x = self.detector(x)
# 重塑为 [batch, S, S, (C + B*5)] 张量
return x.view(-1, self.grid_size, self.grid_size, self.num_classes + 5 * self.num_boxes)
损失函数核心实现
def yolo_loss(preds, targets, lambda_coord=5, lambda_noobj=0.5):
"""
preds: 预测张量 [batch, S, S, C+B*5]
targets: 标签张量 [batch, S, S, C+5]
"""
# 坐标损失权重
coord_mask = targets[..., 20:21] # 物体存在指示器
noobj_mask = 1 - coord_mask
# 边界框坐标损失
box_pred = preds[..., 21:25]
box_target = targets[..., 21:25]
box_loss = lambda_coord * coord_mask * torch.sum(
(box_pred[..., :2] - box_target[..., :2])**2 +
(torch.sqrt(box_pred[..., 2:4]) - torch.sqrt(box_target[..., 2:4]))**2,
dim=-1
)
# 物体置信度损失
conf_pred = preds[..., 20:21]
conf_target = targets[..., 20:21]
conf_loss = coord_mask * (conf_pred - conf_target)**2 + \
lambda_noobj * noobj_mask * (conf_pred - conf_target)**2
# 分类损失
class_pred = preds[..., :20]
class_target = targets[..., :20]
class_loss = coord_mask * torch.sum((class_pred - class_target)**2, dim=-1)
# 总损失
total_loss = torch.sum(box_loss + conf_loss + class_loss)
return total_loss
【完结】