【数据结构 09】哈希
哈希算法:哈希也叫散列、映射,将任意长度的输入通过散列运算转化为固定长度的输出,该输出就是哈希值(散列值)。
哈希映射是一种压缩映射,通常情况下,散列值的空间远小于输入值的空间。
哈希运算的结果称为哈希值,哈希运算是不可逆过程,即不能通过哈希值推算出原值。
哈希运算常用于加密、位图、布隆过滤,位图的作用是海量数据的标记,布隆过滤器的作用是提高海量数据查询的效率(客户端向服务端查询数据)。
一、哈希函数
HashFunc.h
#pragma once
#include
// 仿函数
template
struct HashFunc
{
size_t operator()(const K& key)
{
return (size_t)key;
}
};
// 特化
template<>
struct HashFunc
{
size_t operator()(const std::string& str)
{
size_t res = 0;
for (const auto& ch : str)
{
res *= 131; // 随机数取值,避免哈希冲突
res += ch;
}
return res;
}
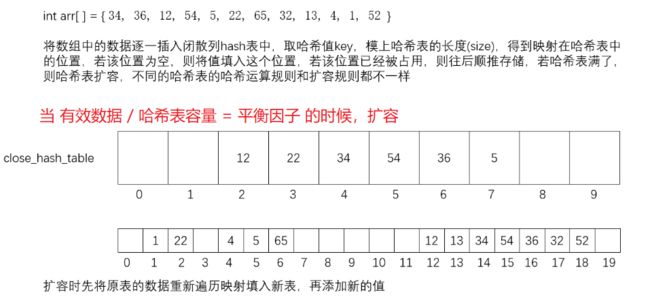
}; 哈希表:将数据根据哈希运算得到哈希值(关键值),再根据哈希值将数据映射在表中,哈希表通常情况是一个vector容器。哈希表分为闭散列和开散列(哈希桶)。
哈希表的数据增删与红黑树差别不大,各有优劣,但是哈希表的数据查询效率远高于红黑树。
二、闭散列
#define _CRT_SECURE_NO_WARNINGS 1
#pragma
#include
#include
#include "HashFunc.h"
enum status
{
EMPTY,
EXIST,
DELETE
};
template
struct CloseHashNode
{
std::pair _kv;
status _status = EMPTY;
};
template>
class CloseHash
{
typedef CloseHashNode Data;
public:
CloseHash()
: _n(0)
{
_table.resize(10);
}
bool Insert(const std::pair& kv)
{
if (Find(kv.first))
return false;
// 负载因子为0.7
if (_n * 10 / _table.size() >= 7)
{
std::vector newTable;
newTable.resize(2 * _table.size());
for (int i = 0; i < _table.size(); ++i)
{
if (_table[i]._status == EXIST)
{
size_t pos = Hash()(_table[i]._kv.first) % newTable.size();
while (newTable[pos]._status != EMPTY)
{
pos = (++pos) % newTable.size();
}
newTable[pos] = _table[i];
}
}
_table.swap(newTable);
}
size_t pos = Hash()(kv.first) % _table.size();
while (_table[pos]._status != EMPTY)
{
pos = (++pos) % _table.size();
}
_table[pos]._kv = kv;
_table[pos]._status = EXIST;
++_n;
return true;
}
Data* Find(const K& key)
{
size_t pos = Hash()(key) % _table.size();
int cnt = 0;
while (_table[pos]._status != EMPTY && cnt != _table.size())
{
if (key == _table[pos]._kv.first && _table[pos]._status == EXIST)
return &_table[pos];
pos = (++pos) % _table.size();
++cnt;
}
return nullptr;
}
bool Erase(const K& key)
{
Data* ret = Find(key);
if (ret)
{
ret->_status = DELETE;
--_n;
return true;
}
else
{
return false;
}
}
private:
std::vector _table;
size_t _n;
};
三、开散列
开散列也称哈希桶,哈希桶的vector节点存储的是数据节点,相同哈希值的节点以链表的形式存储在同一个vector位置上,当节点数与vector容量的比值为平衡因子值(1)时,哈希桶扩容,扩容时重新遍历原表,将原表的元素重新取哈希进行映射,为了提高效率,不拷贝节点,而是改变节点的指向。

#define _CRT_SECURE_NO_WARNINGS 1
#pragma once
#include
#include
#include "HashFunc.h"
template
struct OpenHashNode
{
std::pair kv;
OpenHashNode* next;
OpenHashNode(const std::pair& x)
: kv(x), next(nullptr)
{}
};
template>
class OpenHash
{
typedef OpenHashNode Node;
public:
OpenHash()
: _n(0)
{
_table.resize(10, nullptr);
}
bool Insert(const std::pair& kv)
{
if (Find(kv.first))
return false;
// 检查扩容,平衡因子为 1
if (_n == _table.size())
{
std::vector newTable;
newTable.resize(2 * _table.size(), nullptr);
for (int i = 0; i < _table.size(); ++i)
{
Node* cur = _table[i];
while (cur)
{
Node* next = cur->next;
size_t pos = Hash()(cur->kv.first) % newTable.size();
cur->next = newTable[pos];
newTable[pos] = cur;
cur = next;
}
}
_table.swap(newTable);
}
// 插入新节点
Node* newNode = new Node(kv);
size_t pos = Hash()(newNode->kv.first) % _table.size();
newNode->next = _table[pos];
_table[pos] = newNode;
++_n;
return true;
}
Node* Find(const K& key)
{
size_t pos = Hash()(key) % _table.size();
Node* cur = _table[pos];
while (cur)
{
if (cur->kv.first == key)
return cur;
cur = cur->next;
}
return nullptr;
}
bool Erase(const K& key)
{
Node* ret = Find(key);
if (ret)
{
size_t pos = Hash()(key) % _table.size();
Node* cur = _table[pos];
if (cur == ret)
{
cur = ret->next;
delete ret;
ret = nullptr;
}
else
{
while (cur->next != ret)
{
cur = cur->next;
}
cur->next = ret->next;
delete ret;
ret = nullptr;
}
--_n;
return true;
}
else
{
return false;
}
}
private:
std::vector _table;
int _n;
};
四、测试
#define _CRT_SECURE_NO_WARNINGS 1
#include "CloseHash.h"
#include "OpenHash.h"
using namespace std;
void TestCloseHash()
{
cout << "CloseHash: " << endl << endl;
CloseHash hash;
int arr[] = { 34, 36, 12, 54, 5, 22, 65, 32, 13, 4, 1, 52 };
for (auto& e : arr)
{
hash.Insert(make_pair(e, e));
}
cout << hash.Find(12) << endl;
cout << hash.Find(22) << endl;
cout << hash.Find(32) << endl;
cout << hash.Find(42) << endl;
cout << hash.Find(52) << endl;
cout << endl;
hash.Erase(32);
cout << hash.Find(12) << endl;
cout << hash.Find(22) << endl;
cout << hash.Find(32) << endl;
cout << hash.Find(42) << endl;
cout << hash.Find(52) << endl;
}
void TestOpenHash()
{
cout << endl << endl << "OpenHash: " << endl << endl;
OpenHash hash;
int arr[] = { 34, 36, 12, 54, 5, 22, 65, 32, 13, 4, 1, 52 };
for (auto& e : arr)
{
hash.Insert(make_pair(e, e));
}
cout << hash.Find(12) << endl;
cout << hash.Find(22) << endl;
cout << hash.Find(32) << endl;
cout << hash.Find(42) << endl;
cout << hash.Find(52) << endl;
cout << endl;
hash.Erase(32);
cout << hash.Find(12) << endl;
cout << hash.Find(22) << endl;
cout << hash.Find(32) << endl;
cout << hash.Find(42) << endl;
cout << hash.Find(52) << endl;
}
int main()
{
TestCloseHash();
TestOpenHash();
return 0;
}