适用于汽车 4D 成像雷达的双器件毫米波级联参考设计(TI文档)
说明
该汽车雷达参考设计是一个 76GHz 至 81GHz 的级联雷达传感器模块。这包括由 AWR2243 器件和AM2732R 雷达处理器构成的双器件级联阵列。在这一级联雷达配置中,一个主器件向主器件和辅助器件分配20GHz 的本机振荡器 (LO) 信号,使这两个器件作为单个射频收发器运行。这最多可以支持 6 个发送 (TX) 和8 个接收 (RX) 天线阵元,从而在 MIMO 虚拟阵列中提供总共 48 个虚拟通道。
特性
• 成像雷达
• 长距离 TX 波束形成和波束控制
• 提高角分辨率的 MIMO
• 电源经过优化,减小了尺寸,提高了效率
• 双器件 76GHz 至 81GHz 汽车雷达传感器集成了DSP 和 MCU,并经由 CAN-FD、以太网或 LVDS提供目标数据
• 宽输入电压范围,36V 非电池电源电压,最高可支持42V 电压
• 适用于 ASIL B 的诊断和监控功能
1 系统说明
许多汽车安全系统都需要车辆周围环境的高分辨率图像。该级联雷达参考设计通过结合使用两个 76GHz 至81GHz 雷达收发器、一个雷达处理器、两个 CAN-FD PHY、一个以太网 PHY 和一个低噪声电源,解决了这些问题。系统仅需要两个连接,即电池电源输入和用于数据输出的 CAN-FD 或以太网。
该设计的雷达部分采用印刷电路板 (PCB) 蚀刻天线,带有 6 个发射元件和 8 个接收元件。通过使用该天线,会发送调制线性调频脉冲,并对反射信号采样后输入到板载数字信号处理器 (DSP) 中。借助这些信息,传感器可以记录天线视场内物体的距离、角度和速度测量值。该设计提供了一项功能,可将物体数据以 5Mb/s 的速率写入CAN-FD 总线上的中央电子控制单元 (ECU),将原始数据写入 LVDS 端口,或通过以太网 PHY 以高达 100Mb/s的速率写入数据。
1.1 关键系统规格
检测并跟踪最远 250 米处速度为 ±45 米/秒 (m/s) 的物体(如汽车和卡车)天线方位角视场为 ±75º,且方位角分辨率约为 3.5º展示以下 AWR2243 功能:
• TX 相移
• 数据压缩
• 支持由毫米波 SDK 提供的多普勒频分多址
• (DDMA) 处理链的 HWA
表 1-1 关键系统规格
| FOV 方位角 | ±75 度 |
| FOV 俯仰角 | ±10度 |
| 方位角分辨率 | 3.5度 |
| 最大距离检测(汽车) | 在 ±30 度时为 250 米 在 ±75 度时为 100 米 |
| 距离分辨率 | 1.07m |
| 速度分辨率 | 0.09m/s |
| 最大速度 | ±45.6m/s |
| 雷达数据存储器(0.5 压缩) | 2MB |
2 系统概述
电池电源连接到 12V 输入端子 J10。宽输入电压降压转换器 LM62460-Q1 用于将此 12V 输入转换为 3.3V 输出。然后,LP876242-Q1 接受 3.3V 输入并生成 1.8V、1.2V 和 1.0V 电源轨。为了维持低噪声电源,会对 1V 电源轨进行滤波,以便为雷达的射频 (RF) 部分生成干净的输入电源轨。
2.1 方框图

2.2 设计注意事项
在 TX 波束形成、波束控制和多输入多输出/单输入多输出 (MIMO/SIMO) 等用例中,与单器件传感器相比,大量天线元件可实现较高的信噪比 (SNR) 和出色的角度分辨率。
该应用主要面向提供多种功能(如自适应巡航控制 (ACC)、自动紧急刹车 (AEB)、盲点检测、前侧来车辅助和车道变换辅助)的角雷达和前置远距离雷达系统。该设计还演示了 TI 压缩引擎和硬件加速器 (HWA) 功能。
与兼容的主机/数据采集板结合使用时,级联雷达评估板包含开始评估单器件或双器件级联雷达解决方案所需的一切。
2.3 重点产品
2.3.1 器件
2.3.1.1 AWR2243
AWR2243 器件是一款能够在 76GHz 至 81GHz 频带内运行的集成式单芯片 FMCW 收发器。该器件采用极小的封装实现了前所未有的集成度。AWR2243 是适用于汽车领域中低功耗、自监控、超精确雷达系统的理想解决方案。
AWR2243 器件是一种自包含 FMCW 收发器单芯片解决方案,简化了汽车雷达传感器在 76GHz 至 81GHz 频带范围内的实施。它基于 TI 的低功耗 45nm RFCMOS 工艺构建,从而实现了一个具有内置 PLL 和 ADC 转换器的单片实施 3TX、4RX 系统。简单编程模型更改可支持各种传感器实施(近距离、中距离和远距离),并且能够进行动态重新配置,从而实现多模式传感器。
2.3.1.2 AM2732R
AM273x 系列是基于 Arm Cortex-R5F 和 C66x 浮点 DSP 内核的高度集成、高性能微控制器。借助这款器件,原始设备制造商 (OEM) 和原始设计制造商 (ODM) 能够充分利用完全集成式混合处理器解决方案的灵活性,从而使兼具强大软件支持和丰富用户界面的高性能产品快速推向市场。
AM273x 集成硬件安全模块 (HSM),内置功能安全支持,在芯片上集成了大容量 RAM 且具有较宽温度范围,可面向众多工业和汽车应用提供安全、可靠且具有成本效益的解决方案。
2.3.1.3 LP876242-Q1
LP876242-Q1 器件旨在满足各种安全相关的汽车和工业应用中新型处理器和平台的电源管理要求。该器件具有四个直流/直流降压转换器内核,可生成四个单相输出。该器件设置可通过兼容 I2C 的串行接口或 SPI 串行接口进行更改。
开关时钟会强制进入 PWM 模式,并且相位会交错。可以将开关与外部时钟同步并启用展频模式,以最大限度地降低干扰。
LP876242-Q1 器件是一款电源管理集成电路 (PMIC),采用 32 引脚、0.5mm 间距、5.5mm×5mm QFN HotRod封装。该器件旨在为汽车或工业应用中的嵌入式系统或片上系统 (SoC) 供电。所有降压转换器都能够提供高达 1A的灌电流,并支持动态电压调节。双缓冲电压调节寄存器使每个降压转换器能够在运行期间通过 SPI、I2C 或状态转换切换至不同的电压。DPLL 使降压转换器与外部时钟输入同步,并在输出轨之间实现相位延迟。
两个 I2C 接口通道或一个 SPI 通道可用于配置电源轨和 LP876242-Q1 器件的电源状态。I2C 通道 1 (I2C1) 是主通道,可用于访问负责控制可配置电源序列发生器、电源轨状态和输出以及器件运行状态的寄存器。
I2C 通道 2 (I2C2) 通过 GPIO2 和 GPIO3 引脚提供,专用于访问 Q&A 看门狗通信寄存器。当配置 SPI 而不是两个 I2C 接口时,SPI 可以访问所有寄存器,包括 Q&A 看门狗寄存器。可使用 NVM 选项来使 I2C1 也能够访问所有寄存器,包括 Q&A 看门狗寄存器。
LP876242-Q1 器件具有十个 GPIO,每个 GPIO 具有多种功能和可配置特性。当配置为通用输出引脚时,所有GPIO 均可包含在上电和下电序列中,并用作外部资源的使能信号。此外,每个 GPIO 都可以配置为唤醒输入或睡眠模式触发器。GPIO 端口的默认配置来自 NVM 存储器,如果外部连接允许,可由软件重新配置。
LP876242-Q1 器件包含可监控软件锁定情况的 Q&A 看门狗,以及可监控随附 MCU 所产生锁步信号且具有故障注入选项的系统错误监控输入 (nERR_MCU)。该器件具有保护和诊断机制,如短路保护、热监测和关断。PMIC可通过中断信号向处理器报告这些事件,以便处理器做出响应。
2.3.1.4 LM62460-Q1
LM6x4xx-Q1 降压稳压器系列是面向汽车的稳压器,可提供固定或可调节输出电压(可设置范围为 1V 至预期输入电压的 95%)。这些稳压器可在宽输入电压范围(3V 至 36V)内工作,可承受高达 42V 的瞬态容差。
2.3.1.5 TCAN1043A-Q1
TCAN1043A-Q1 是一款高速控制器局域网 (CAN) 收发器,符合 ISO 11898-2:2016 高速 CAN 规范的物理层要求。该器件支持传统 CAN 和 CAN FD(数据速率高达 8 兆位/秒 (Mbps))。
TCAN1043A-Q1 可通过 INH 输出引脚选择性地启用系统上可能存在的各种电源,从而减少整个系统级别的电池电流消耗。这使得在低电流睡眠模式中,功率传送到除 TCAN1043A-Q1 以外的所有系统元件,同时对 CAN 总线进行监控。检测到唤醒事件时,TCAN1043A-Q1 通过将 INH 驱动至高电平来启动系统。
TCAN1043A-Q1 具有一个 SWE 计时器,可在无操作 4 分钟 (tINACTIVE) 后,从待机模式安全转换为睡眠模式。如果 MCU 出现故障,无法将器件转换为正常模式,这一特性也可以保证器件转换为低功耗的睡眠模式。
2.3.1.6 TCAN1044A-Q1
TCAN1044A-Q1 是一款高速控制器局域网 (CAN) 收发器,符合 ISO 11898-2:2016 高速 CAN 规范的物理层要求。
TCAN1044A-Q1 收发器支持传统 CAN 和 CAN FD 网络,数据速率高达 8 兆位/秒 (Mbps)。TCAN1044A-Q1 包括通过 VIO 端子实现的内部逻辑电平转换功能,允许将收发器 I/O 直接连接到 1.8V、2.5V、3.3V 或 5V 逻辑 I/O。此类收发器支持低功耗待机模式,并且可通过符合 ISO 11898-2:2016 所定义唤醒模式 (WUP) 的 CAN 来唤醒。此外,TCAN1044A-Q1 收发器还包括保护和诊断功能,支持热关断 (TSD)、TXD 显性超时 (DTO)、电源欠压检测和高达 ±58V 的总线故障保护。
2.3.1.7 DP83TC812-Q1
DP83TC812-Q1 器件是一款符合 IEEE 802.3bw 标准的汽车 PHYTER 以太网物理层收发器,可使用非屏蔽双绞线电缆。PHY 支持 TC10 睡眠和唤醒功能。它提供通过单一屏蔽双绞线电缆发送和接收数据所需的所有物理层功能。该器件具有 xMII 灵活性,支持标准 MII、RMII、RGMII 和 SGMII MAC 接口。PHY 还在 MDI 侧集成了一个低通滤波器以减少辐射。
该器件包含诊断工具套件,从而提供广泛的实时监控工具、调试工具和测试模式。该工具套件中包含首款集成式静电放电 (ESD) 监控工具。它能够对 MDI 上的 ESD 事件进行计数,并且能够通过使用可编程中断提供实时监控。此外,DP83TC812-Q1 还包含一个假随机二进制序列 (PRBS) 帧生成工具,该工具与内部回送完全兼容,能够在不使用 MAC 的情况下发送和接收数据。该器件采用 6.00mm × 6.00mm、36 引脚 VQFN 可湿侧面封装。该器件与 DP83TG720 (1000BASE-T1) 引脚对引脚兼容。它还与 DP83TC811 外型兼容。这将允许 DP83TC811、
DP83TC812、DP83TC814 和 DP83TG720 使用单个 PCB 布局。
2.3.1.8 TPS61379-Q1
TPS61379-Q1 是一款完全集成的同步升压转换器,集成了负载断开功能。输入电压范围从 2.3V 到 14V,最大输出电压高达 18.5V。开关电流限制典型值为 2A。它会消耗 VIN 25μA 的静态电流。
TPS61379-Q1 采用峰值电流模式控制,可编程开关频率在 200kHz 到 2.2MHz 之间。在中等到重负载条件下,该器件在固定频率 PWM 模式下运行。在轻负载条件下,通过配置 MODE 引脚可实现两种可选模式:自动 PFM 模式和强制 PWM 模式,以便在轻负载条件下实现效率和抗噪性平衡。可与外部时钟同步开关频率。TPS61379-Q1使用内部时钟展频在 FPWM 模式下提升 EMI 友好性。此外,还有内部软启动时间来限制浪涌电流。
TPS61379-Q1 有各种固定输出电压版本,可节省外部反馈电阻器。它支持外部环路补偿,在更广泛的 VOUT/VIN范围内优化稳定性和瞬态响应。它还集成了稳健的保护特性,包括输出短路保护、输出过压保护和热关断保护。TPS61379-Q1 采用具有可湿性侧面的 3mm × 3mm 16 引脚 QFN 封装。
2.3.1.9 TMP102-Q1
TMP102-Q1 器件是一款数字温度传感器,在要求高精度的应用中是 NTC 和 PTC 热敏电阻的理想替代品。该器件在未经校准或无外部组件信号调节的情况下可提供的精度为 ±0.5°C。器件温度传感器为高度线性化产品,无需复杂计算或查表即可得知温度。片上 12 位 ADC 具备最低 0.0625°C 的分辨率。
1.6mm × 1.6mm SOT563 封装尺寸较 SOT23 封装减小 68%。TMP102-Q1 器件具有 SMBus、两线制和 I2C 接口兼容性,最多允许四个器件位于一条总线上。该器件还具有 SMBus 警报功能。器件的额定工作电压范围是1.4V 至 3.6V,整个工作范围内最大静态电流为 10μA。
TMP102-Q1 器件适用于在各种通信、计算机、消费类产品、环境、工业和仪表等各种应用中进行工作温度测量。器件的额定工作温度范围为 -40°C 至 +125°C。
TMP102-Q1 生产单元已完全通过可追溯 NIST 的传感器测试,并且已借助可追溯 NIST 的设备使用 ISO/IEC17025 标准认可的校准进行验证。
3 系统设计原理
对于具有额外安全要求的系统,此参考设计中包含诊断和监控功能。
• 成像雷达
• 看门狗:LP876242-Q1 器件包含可监控软件锁定情况的 Q&A 看门狗,以及可监控随附 MCU 所产生锁步信号且具有故障注入选项的系统错误监控输入 (nERR_MCU)。
在这一实施方案中,SPI 总线用于 PMIC 与 MCU 之间的通信。这是使用用于 I2C 的两个引脚(SCK 和 SDI)以及 GPIO2 与 GPIO3(CS0、SDO)来完成的。当配置 SPI 而不是两个 I2C 接口时,SPI 可以访问所有寄存器,包括 Q&A 看门狗寄存器。
• 电压监控器 (VMON):LP876242-Q1 的电压监控引脚已连接到 1V2_FILTERED 和 5V 电源轨。如果发生欠压或过压事件,这使得 PMIC 可监控这些电源轨,并使用SOC_nRESET_FROM_PMIC (GPIO10) 向 SOC 发出硬复位命令。这些输入均经过低通滤波,可消除不会对系统运行产生不利影响的任何短期事件。这些监控器都直接连接到雷达。这避免了电源滤波器中的铁氧体磁珠可能发生故障且无法检测到的情况。VMON 阈值和OV/UV 条件下采取的操作均在 PMIC 的非易失性存储器 (NVM) 设置中进行配置,并可通过 SPI 进行重新配置。
• 额外的电压监控:为了监控 VIN_RF1 和 VIN_RF2 电源轨,它们连接到 SOC 上的 ADC 输入。如果 PMIC 监控的电源轨工作正常,则 SOC 将通电,并且 ADC 将能够监控射频轨。SOC 在故障期间采取的措施可在软件中配置。
• 看门狗负责监控 MCU 是否正常运行。该看门狗需要 MCU 以特定的时间间隔发出特定的消息,以便检测 MCU是否正常运行。当看门狗检测到 MCU 未正常运行时,LP876242-Q1 器件会将 SOC_nRESET_FROM_PMIC(GPIO10) 引脚拉低。此过程会触发 SOC 和 Fe1/FE2 重启。
4 硬件、软件、测试要求和测试结果
4.1 硬件要求
该级联雷达参考设计包括:
• 两个 AWR2243 器件:一个集成式单芯片 FMCW 收发器。
• 使用电源管理集成电路 (PMIC) 直流/直流电源 (LP876242-Q1)、宽输入电压降压直流/直流电源 (LM62460-Q1)和升压直流/直流电源 (TPS61379-Q1) 的电源管理网络。
• 两个 CAN-FD 收发器(TCAN1043A 和 TCAN1044A)和以太网 PHY (DP83TC812-Q1)。
• 该参考设计还包括一些器件,帮助通过与 PC 的 USB 链路和以太网端口进行板载仿真和 UART 仿真。
4.2 测试设置
4.2.1 虚拟天线阵列
该双芯片级联 EVM 包含 6 个 TX 通道和 8 个 RX 通道,如图 4-1 所示,在 MIMO 虚拟阵列中总共提供 48 个虚拟通道。图 4-2 展示了通道的排列,其中 MIMO 阵列在方位角方向上提供约 3 度的孔径受限角分辨率。
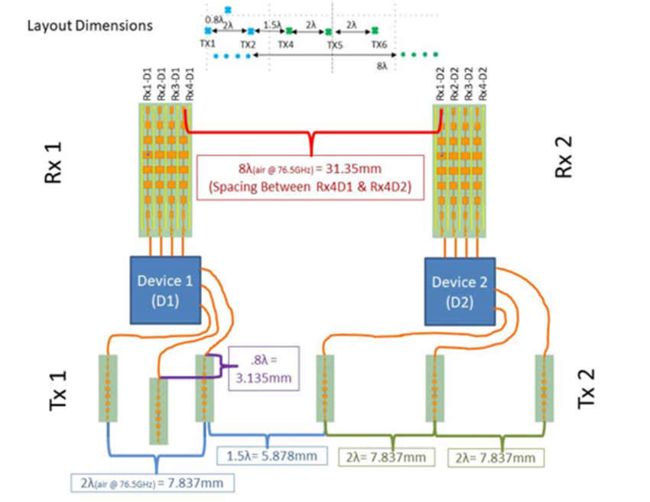
图 4-1. TX 和 RX 通道间距

图 4-2. MIMO 虚拟阵列
4.3 测试结果
4.3.1 角度分辨率测量
方位角分辨率通过使用两个 10dBsm 角反射器来测量,这两个角反射器放置在距离雷达约 9.5 米的径向距离处的同一距离单元中。在角度估算之前,会先应用视轴校准(例如,根据从视轴上单个角反射器获得的测量数量,对通道间相位增益不匹配进行补偿)。
角度估算使用 512 点 FFT 来执行。图 4-3 展示了从与角反射器反射相对应的距离多普勒单元测得的角谱,其中包括与两个角反射器相对应的峰值。测得的峰间角距约为 3.3 度,与约 3 度的理论角度分辨率接近。通过使用Capon 波束形成器或 MUSIC 等计算量更大的角度估算方法,可以获得更高的角度分辨率。
图 4-3. 角反射器
图 4-4 展示了与两个角反射器相对应的距离单元的角谱。
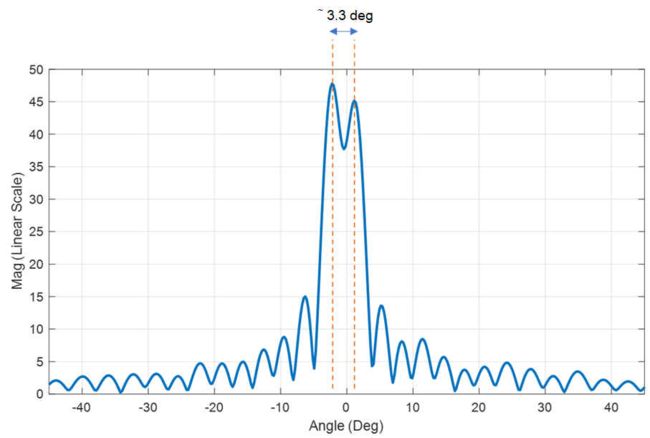
图 4-4. 角度分辨率测量
5 设计和文档支持
5.1 设计文件
5.1.1 原理图
要下载原理图,请参阅TIDA-020047 reference design | TI.com中的设计文件。
5.1.2 物料清单
要下载物料清单 (BOM),请参阅TIDA-020047 reference design | TI.com中的设计文件。
5.1.3 PCB 布局建议
5.1.3.1 20GHz (FMCW) 射频 LO 同步
此参考设计基于 TI 的 AWR2243 雷达芯片。使用 20GHz LO 输入和输出路径,其中两个芯片会级联在一起并同步运行。这要求每个芯片的射频 LO 频率同步。AWR2243 合成器会在 19GHz 至 20.25GHz 范围内生成 LO,具体取决于编程的线性调频脉冲射频输出频率。
指定为主器件的 AWR2243 会生成一个公共本机振荡器 (LO) 信号(19GHz 至 20.25GHz),该信号将在整个级联系统中的所有发送器和接收器之间共享。
主器件 AWR2243 能够通过两个不同的延迟匹配放大器,在两个不同的输出引脚上提供共享的 LO 信号。FM_CW_CLKOUT 和 FM_CW_SYNCOUT 中的任何一个或全部都可以用作从主器件到辅助器件的 LO 源。为了避免这两个器件中使用的 LO 信号之间出现偏差,输入主器件的 LO 信号输入需要通过与主器件和辅助器件之间布线长度匹配的布线。如图 5-2 所示,一个 LO 信号输出会通过一条迹线在器件之间进行路由。然后,来自主器件的另一个输出 LO 信号使用长度相同的迹线环回到主器件上的 LO 信号输入。

图 5-1. LO 时钟信号
图 5-2. LO 时钟路由
5.1.3.2 PCB 层堆叠
普通的 FR4 电路板材料会导致本设计顶部两层中所含的 77GHz 天线出现不可接受的损耗。此设计使用 Rogers Corporation 的陶瓷材料来满足电介质要求。此外,Rogers Corporation 的 RO4000® LoPro® 系列层压板使用经过反向处理的金属箔,可获得更平滑的金属。选择这种材料可以减少蚀刻特征尺寸的差异。当波长小于 4mm 时,这些容差非常重要。通过将 20GHz LO 时钟 (FM_CW) 路由到与天线相同的层,只需要一个 RO4000 内核。

图 5-3. PCB 层堆叠
5.1.3.3 电路板照片
图 5-4. 电路板 A 侧
图 5-5. 电路板 B 侧