【论文阅读】Automated Runtime-Aware Scheduling for Multi-Tenant DNN Inference on GPU
该论文发布在 ICCAD’21 会议。该会议是EDA领域的顶级会议。
基本信息
| Author | Hardware | Problem | Perspective | Algorithm/Strategy | Improvment/Achievement |
|---|---|---|---|---|---|
| Fuxun Yu | GPU |
|
SW Scheduling |
|
|
论文作者
Fuxun Yu 是一名来自微软的研究员。主要研究的是大规模深度学习服务系统。上一次看它的论文是一片关于该领域的综述,感觉写的蛮不错的。
背景
现在深度学习特别特别地火,multi-tenant DNN inference 也变成一个比较重要的问题。那什么是 multi-tenant DNN inference 呢?简而言之,就是研究如何让 GPU 同时运行不同模型推理。现有解决 multi-tenant DNN inference 问题的主要方法有两种:sequential exection 和 parallel/concurrent exection。

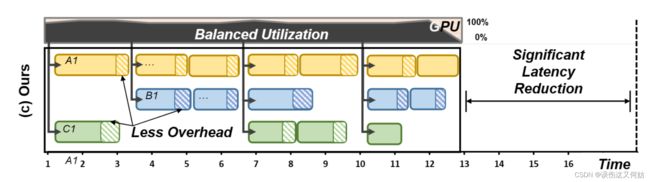
但这两种方式对于 GPU 资源利用不够充分。第一种方法(Sequential)由于是串行计算,自然GPU利用会比较低。第二种方法(Parallel)尽管前期提高了 GPU 的利用率,但当有的模型层数比较深,有的模型比较浅时,还会出现不平衡的现象。而且,由于GPU和内存资源争用,会产生高额的格外开销。
为此,希望提出一个新的解决方案,该解决方法能够进一步提高资源的利用率从而降低 latency。
Schedualing Framework
multi-tenant schedule的关键点在于如何管理运行时的一致性以及平衡资源利用率。
基本思想
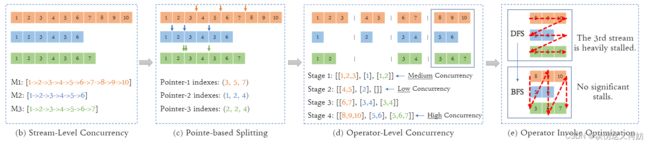
对于 Stream-Level 并行而言, 每个 GPU 流都会分配一个执行序列以实现不同模型并行推理。同时,如果要实现更细粒度的调度,这里引入一个概念 ---- 「pointers」。在插入同步阻碍(synchronization barries)的地方叫pointer。这样会将一个执行序列分成多个stage,这种拆分操作可以保证只有同一stage的操作才共享资源。我们可以通过调整pointers的位置而改变每个阶段的操作数量,从而找出最优的资源利用率策略。最后,状态内也做了一点优化,传统的DFS调动策略会导致GPU流之间存在优先级,导致停滞时间很长,因此改成使用BFS调度策略,使每个操作都得到执行。
这里有一个最关键的地方就是状态如何划分。接下来重点讲解这一部分。
Automated Scheduling Search
首先要明确我们的目标是找到一个stage集合,使得总时延最少。
τ ∗ = arg min τ f ( τ ) , for τ ∈ D τ \tau^*=\arg\min_\tau f(\tau),\quad\text{for} \tau\in D_\tau τ∗=argτminf(τ),forτ∈Dτ
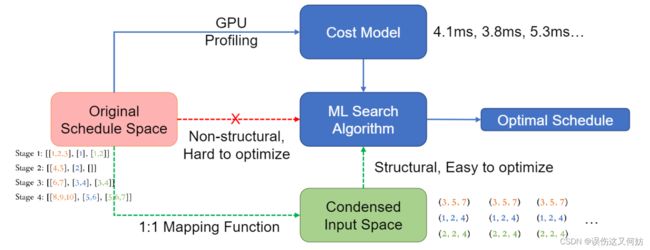
但由于 D τ D_\tau Dτ 并不是一个规则的数组集合,这导致难以比较和优化,在此,做了一个pointers和stages的映射:
ρ ∗ = arg min ρ f ( τ ) , s . t . τ = T ( G , ρ ) , f o r ρ ∈ D ρ . \begin{aligned}&\rho^*=\arg\min_\rho f(\tau),\\&\mathrm{s.t.}\quad\tau=T(G,\rho),\quad\mathrm{for}\rho\in D_\rho.\end{aligned} ρ∗=argρminf(τ),s.t.τ=T(G,ρ),forρ∈Dρ.
关于 T ( G , ρ ) T(G, \rho) T(G,ρ) 的用法,下面这个例子可以说明:
ρ 1 : ( 3 , 5 , 7 ) + S 1 : [ 1 , 2 , 3 , . . . , 9 , 10 ] = S 1 ′ : [ 1 , 2 , 3 ] , [ 4 , 5 ] , [ 6 , 7 ] , [ 8 , 9 , 10 ] \begin{aligned}\rho_1:(3,5,7)&~+~\mathcal{S}_1:[1,2,3,...,9,10]=\\&\mathcal{S}_1^{^{\prime}}:[1,2,3],[4,5],[6,7],[8,9,10]\end{aligned} ρ1:(3,5,7) + S1:[1,2,3,...,9,10]=S1′:[1,2,3],[4,5],[6,7],[8,9,10]
这样我们可以将不定长且不规则的Stages数组变成规则的pointers矩阵。之后根据上图进行迭代优化,找出最优解。
Random Search
第一种方法是随机搜索,顾名思义,该算法会从搜索空间中随机抽取样本(pointers矩阵),然后计算相应的时延成本。经过多轮迭代,选择最低时延成本的样本作为最优解。
这种方法虽然很简单,但后面也验证了该方法的有效性。
Coordinate Gradient Search
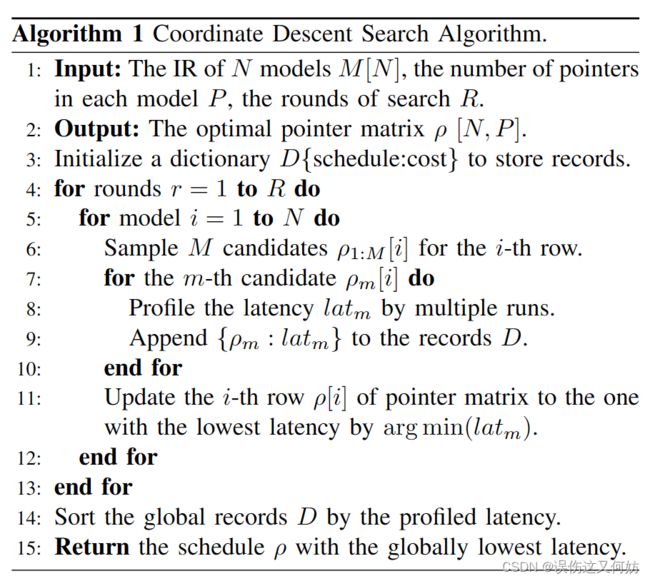
第二种方法是坐标梯度搜素。这种方法类似于我们所说的控制变量法。核心思想是每次仅仅对一个模型的划分策略做优化。
具体的算法流程如下:
模型性能评估
加速性能
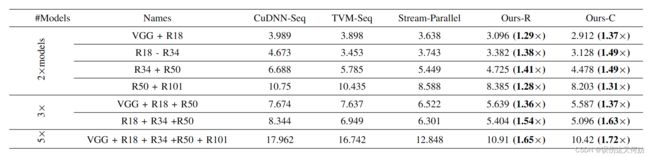
可以看到,该模型所用时间比传统算法都有提高,模型集合的复杂程度越高,性能越好。这其实也符合常理,不同模型复杂度相差越大,该算法的加速效率越高,因为它将资源更加均匀地分配了。
搜索算法比较与开销分析
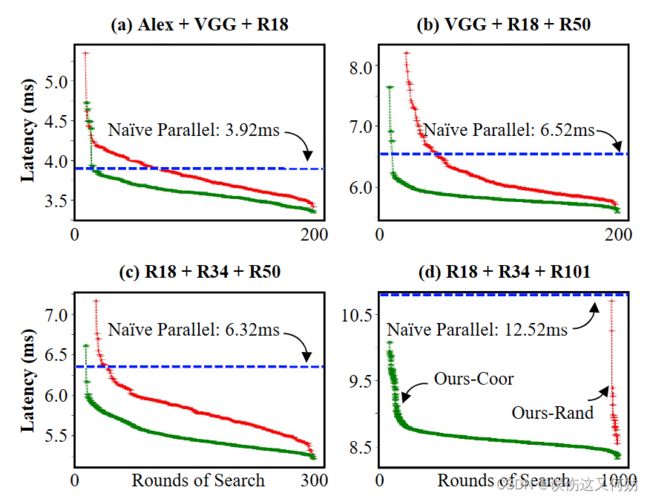
在所有情况下,无论是Random还是Coordinate都优于传统的并行策略。但在模型集合复杂度很高的时候,Random算法的效果并不理想,只有在1000轮时才有很明显的效果。话又说回来,如果模型集合的复杂度不高,大可以使用Random算法,这个算法的时间复杂度一定是远远低于coordinate算法的。
下面来看一下Coordiante算法的时间开销。
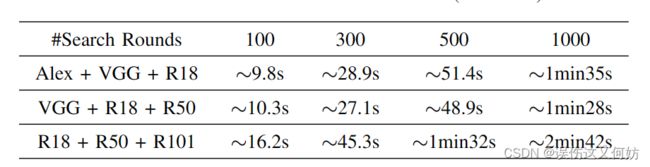
在大部分情况下,Coordiante算法的时间开销大概在10s-3min内。由于我们只需要对模型集合调整一次(但模型集合会有很多呀)并且可以离线调优,因此是这点时间开销可以接受的。