PPO代码部分,训练离散动作
1. 导入必须要的包
import torch
import torch.nn as nn
import torch.nn.functional as f
import torch.optim as optim
from torch.distributions import Categorical
from collections import deque
import random
import matplotlib.pyplot as plt
import numpy as np
import gym
import copy
2. 定义actor网络和critic网络
class actor_net(nn.Module):
def __init__(self, state_n, action_n, hidden_n):
super(actor_net, self).__init__()
self.fc1 = nn.Linear(state_n, hidden_n)
self.fc2 = nn.Linear(hidden_n, hidden_n)
self.fc3 = nn.Linear(hidden_n, action_n)
def forward(self, x):
x = f.relu(self.fc1(x))
x = f.relu(self.fc2(x))
probs = f.softmax(self.fc3(x), dim = 1)
return probs
class critic_net(nn.Module):
def __init__(self, state_n, hidden_n):
super(critic_net, self).__init__()
self.fc1 = nn.Linear(state_n, hidden_n)
self.fc2 = nn.Linear(hidden_n, hidden_n)
self.fc3 = nn.Linear(hidden_n, 1)
def forward(self, x):
x = f.relu(self.fc1(x))
x = f.relu(self.fc2(x))
value = self.fc3(x)
return value
3. 定义存储数据的buffer,包括buffer添加数据,采样数据,清空数据
class buffer(object):
def __init__(self, length):
self.buffer_length = length
self.buffer = deque(maxlen = self.buffer_length)
def push(self, trans):
self.buffer.append(trans)
def sample(self):
batch = list(self.buffer)
return zip(*batch)
def clear(self):
self.buffer.clear()
def length(self):
return len(self.buffer)
4. 定义config
class config():
def __init__(self):
self.env_name = 'CartPole-v1'
self.train_eps = 200
self.test_eps = 20
self.max_step = 200
self.eval_eps = 5
self.eval_per_ep = 10
self.gamma = 0.99
self.actor_lr = 0.0003
self.critic_lr = 0.0003
self.buffer_length = 100
self.eps_clip = 0.2
self.entropy_coef = 0.01
self.batch_size = 100
self.update_n = 4
self.hidden_n = 256
self.seed = 1
self.device = 'cpu'
5. 定义PPO,包括根据状态采样动作,PPO更新
class PPO():
def __init__(self, cfg):
self.gamma = cfg.gamma
self.device = torch.device(cfg.device)
self.actor = actor_net(cfg.state_n, cfg.action_n, cfg.hidden_n).to(self.device)
self.critic = critic_net(cfg.state_n, cfg.hidden_n).to(self.device)
self.actor_optim = optim.Adam(self.actor.parameters(), lr=cfg.actor_lr)
self.critic_optim = optim.Adam(self.critic.parameters(), lr=cfg.critic_lr)
self.memory = buffer(cfg.buffer_length)
self.update_n = cfg.update_n
self.eps_clip = cfg.eps_clip
self.entropy_coef = cfg.entropy_coef
self.sample_count = 0
self.batch_size = cfg.batch_size
def sample_action(self, state):
self.sample_count += 1
state = torch.tensor(state, device=self.device).unsqueeze(dim=0)
probs = self.actor(state)
dist = Categorical(probs)
action = dist.sample()
self.log_probs = dist.log_prob(action).detach()
return action.detach().cpu().numpy().item()
@torch.no_grad()
def predict_action(self, state):
state = torch.tensor(state, device=self.device).unsqueeze(dim=0)
probs = self.actor(state)
dist = Categorical(probs)
action = dist.sample()
return action.detach().cpu().numpy().item()
def update(self):
if self.memory.length() < self.batch_size:
return
states, actions, log_probs, rewards, dones = self.memory.sample()
states = torch.tensor(np.array(states), device=self.device)
actions = torch.tensor(np.array(actions), device=self.device)
log_probs = torch.tensor(log_probs, device=self.device)
returns = []
discounted_sum = 0
# 蒙特卡洛求优势函数,方差大,时序差分求优势函数,偏差大,一般都采用GAE(蒙特卡洛和时序差分的结合)
# 磨菇书采用的是蒙特卡洛
for reward, done in zip(reversed(rewards), reversed(dones)):
if done:
discounted_sum = 0
discounted_sum = reward + (self.gamma * discounted_sum)
returns.insert(0, discounted_sum)
returns = torch.tensor(returns, device=self.device)
returns = (returns - returns.mean()) / (returns.std() + 1e-5)
for _ in range(self.update_n):
values = self.critic(states)
advantage = returns - values.detach()
probs = self.actor(states)
dist = Categorical(probs)
new_log_probs = dist.log_prob(actions)
ratio = torch.exp(new_log_probs - log_probs)
surr1 = ratio * advantage
surr2 = torch.clamp(ratio, 1 - self.eps_clip, 1 + self.eps_clip) * advantage
actor_loss = -torch.min(surr1, surr2).mean() + self.entropy_coef * dist.entropy().mean()
critic_loss = (returns - values).pow(2).mean()
self.actor_optim.zero_grad()
self.critic_optim.zero_grad()
actor_loss.backward()
critic_loss.backward()
self.actor_optim.step()
self.critic_optim.step()
self.memory.clear()
6. 定义环境和智能体
def get_env_agent(cfg):
env = gym.make(cfg.env_name)
state_n = env.observation_space.shape[0]
action_n = env.action_space.n
print('状态空间维度:', state_n)
print('动作空间维度:', action_n)
setattr(cfg, 'state_n', state_n)
setattr(cfg, 'action_n', action_n)
agent = PPO(cfg)
return env, agent
7. 定义训练
def train(cfg, env, agent):
print('train')
rewards = []
steps = []
best_ep_reward = 0
output_agent = None
for ep_i in range(cfg.train_eps):
ep_reward = 0
ep_step = 0
state = env.reset(seed = cfg.seed)
for _ in range(cfg.max_step):
ep_step += 1
action = agent.sample_action(state)
next_state, reward, done, _ = env.step(action)
agent.memory.push((state, action, agent.log_probs, reward, done))
state = next_state
agent.update()
ep_reward += reward
if done:
break
if (ep_i + 1) % cfg.eval_per_ep == 0:
sum_eval_reward = 0
for _ in range(cfg.eval_eps):
eval_ep_reward = 0
state = env.reset()
for _ in range(cfg.max_step):
action = agent.predict_action(state)
next_state, reward, done, _ = env.step(action)
state = next_state
eval_ep_reward += reward
if done:
break
sum_eval_reward += eval_ep_reward
mean_eval_reward = sum_eval_reward / cfg.eval_eps
if mean_eval_reward > best_ep_reward:
best_ep_reward = mean_eval_reward
output_agent = copy.deepcopy(agent)
print('train ep_i:%d/%d, rewards:%f, mean_eval_reward:%f, best_ep_reward:%f, update model'%(ep_i + 1, cfg.train_eps, ep_reward, mean_eval_reward, best_ep_reward))
else:
print('train ep_i:%d/%d, rewards:%f, mean_eval_reward:%f, best_ep_reward:%f'%(ep_i + 1, cfg.train_eps, ep_reward, mean_eval_reward, best_ep_reward))
steps.append(ep_step)
rewards.append(ep_reward)
env.close()
return output_agent, rewards
8. 定义测试
def test(cfg, env, agent):
print('test')
rewards = []
steps = []
for ep_i in range(cfg.test_eps):
ep_reward = 0
ep_step = 0
state = env.reset()
for _ in range(cfg.max_step):
ep_step += 1
action = agent.predict_action(state)
next_state, reward, done, _ = env.step(action)
state = next_state
ep_reward += reward
if done:
break
steps.append(ep_step)
rewards.append(ep_reward)
print('test ep_i:%d, reward:%f'%(ep_i + 1, ep_reward))
env.close()
return rewards
9. 定义画图
def smooth(data, weight = 0.9):
last = data[0]
smoothed = []
for point in data:
smoothed_val = last * weight + (1 - weight) * point
smoothed.append(smoothed_val)
last = smoothed_val
return smoothed
10. main函数以及运行结果
if __name__ == '__main__':
cfg = config()
env, agent = get_env_agent(cfg)
better_agent, train_rewards = train(cfg, env, agent)
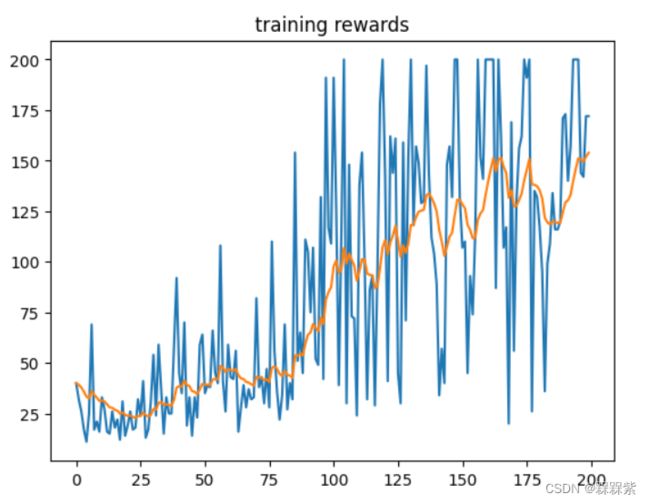
plt.figure()
plt.title('training rewards')
plt.plot(train_rewards, label = 'train_rewards')
plt.plot(smooth(train_rewards), label = 'train_smooth_rewards')
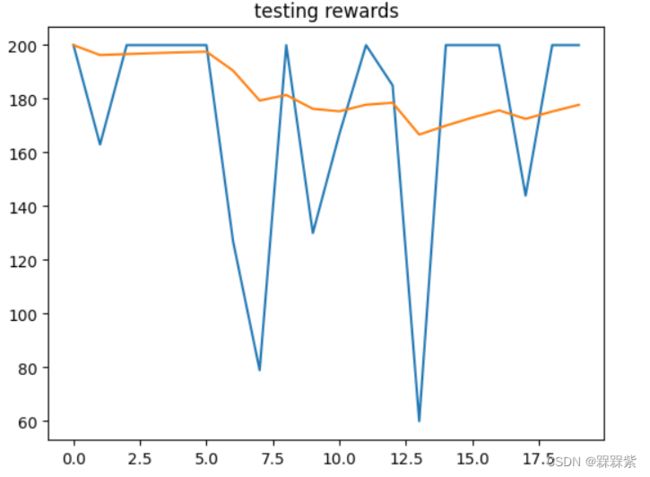
test_rewards = test(cfg, env, better_agent)
plt.figure()
plt.title('testing rewards')
plt.plot(test_rewards, label = 'test_rewards')
plt.plot(smooth(test_rewards), label = 'test_smooth_ewards')
plt.show()