论文解读--High Fidelity Physic Simulation of a 512-Channel 4D-Radar Sensor for Automotive Applications
汽车雷达512通道4D雷达传感器的高准确度物理仿真
摘要
雷达已成为当今车辆中部署的许多主动安全和舒适相关高级驾驶辅助系统(ADAS)的核心传感技术。利用雷达技术,自车可以同时探测多个目标的距离和速度。采用多输入多输出(MIMO)阵列,还可以在方位角和仰角上检测目标的到达角。4D汽车雷达传感器可以确定交通场景中目标的距离、速度、方位角和俯仰角。目前,交通场景雷达回波主要是通过测量获得的。虽然测量是有价值的,但它可能是昂贵的,耗时的,由于实用性问题而受到限制,并且在某些corner-case交通场景中也是不安全的。仿真已成为合成雷达回波的潜在替代来源,可用于开发、测试和改进信号处理技术和检测算法。仿真的一个关键挑战是在全尺寸交通场景中保持目标的准确表示,同时仍然能够有效地解决电子大问题。MIMO阵列的引入进一步增加了此类仿真的复杂性和计算负载需求。在本文中,我们提出了一种计算效率高、准确度高、基于物理的77 GHz调频连续波形(FMCW) 512通道MIMO雷达传感器仿真工作流程。我们演示了如何从全尺寸交通场景仿真中获得的合成雷达回波可用于创建4D雷达点云。然后,通过将生成的4D雷达点云叠加在4个相应的复杂程度不同的全尺寸交通场景上,来评估合成雷达回波的准确性。这项研究的结果表明,通过仿真获得的精确雷达回波可以用于开发下一代自动驾驶汽车雷达传感器。
1 介绍
先进驾驶辅助系统(ADAS)通过显著提高车辆安全性并为实现全自动驾驶提供了途径,彻底改变了汽车行业。1级和2级自动化已经部署在商用车辆上,提供停车、转向、交通堵塞和车道控制辅助等功能[1],[2]。与安全相关的ADAS的一个关键要求是在车辆周围高度动态的环境中保持持续可靠的态势感知。具体来说,车辆必须知道它与周围和远处环境中的其他参与者的位置。这些行为者包括其他车辆、基础设施和脆弱的道路使用者(行人、骑自行车的人等)。利用光探测与测距(Lidar)、无线电探测与测距(Radar)、光学相机和超声波传感器绘制车辆周围环境地图[3]、[4]、[5]、[6]。
虽然最稳健、最可靠的环境映射策略将涉及各种传感器融合,但雷达已成为主要的感知技术。雷达目前用于变道辅助(LCA)、自适应巡航控制(ACC)、自动紧急制动(AEB)、盲点检测(BSD)和乘员检测等应用。事实上,一些正在开发的车辆拥有多达10个雷达传感器[7]。激光雷达相对较高的成本限制了它在大批量、低成本车辆中的应用。另一方面,光学相机在较差的光照条件下难以识别目标的距离。超声波传感器很便宜,但探测范围很有限。雷达相对便宜(与激光雷达相比),可以在非常恶劣的光照和天气条件下同时探测和确定多个目标的距离、速度和到达角度[8]。目前,大量商用汽车雷达传感器已在77 GHz附近开发[9],[10],[11],[12],[13],[14]。
汽车雷达中第一代多输入多输出(MIMO)阵列[15],[16],[17]的实现仅确定交通场景中目标的到达方位角,以提供所谓的鸟瞰图[18],[19],[20]。除了距离、速度和到达方位角(AoA)之外,雷达传感器还需要通过俯仰角AoA来确定被探测目标的高度。事实上,作为主动安全定义的一部分,欧洲新车评估计划(Euro NCAP)已经规定,车辆必须具备判断检测到的障碍物是否应该越过(人孔盖、汽水罐等)、是否应该从(天桥、架空道路标志等)下行驶、是否应该绕过或在最坏情况下通过制动来避开的能力[21]。最近的努力已经通过引入MIMO 4D雷达传感器来解决这一需求,该传感器可以确定目标的距离、速度、方位角和仰角AoA,并从交通场景中产生点云[7]、[21]、[22]、[23]、[24]、[25]、[26]、[27]、[28]、[29]、[30]。文献[22]采用了4D雷达传感器和单视摄像头的传感器融合策略,对交通场景进行三维映射。另一种4D雷达用于检测路沿石和护栏,用于道路边界估算[27]。为了实现经济实惠的4D雷达传感器,级联调频连续波形(FMCW)雷达被采用。在[26]中实现了一个2芯片级联FMCW雷达(6 Tx, 8 Rx),而在[28]中实现了一个4芯片级联FMCW雷达(12 Tx, 16 Rx, 192虚拟通道)传感器。最近,12个单片微波集成电路(mmic)被用于创建具有1,728个虚拟通道(36 Tx, 48 Rx)的4D成像雷达[30]。
MIMO技术通过合成更大的虚拟天线阵列孔径来提高雷达的角分辨率。然而,为了满足汽车应用尺寸、重量、功率和成本(SWaP-C)的限制,原始雷达信号的信号处理在最终传感器性能中起着重要作用。因此,在开发、测试和验证雷达驱动应用所需的信号处理和检测算法时,需要来自交通场景的原始雷达回波。传统上,这些雷达回波是通过测量获得的。如果操作得当,测量可以提供准确的结果,同时考虑到所有系统和环境因素。然而,在某些情况下,测量可能是昂贵的、耗时的,有时是不切实际的或危险的。
仿真已经成为一种获取合成雷达回波的替代方法,用于开发信号处理方法和检测算法[20]、[31]、[32]、[33]、[34]、[35]、[36]、[37]、[38]、[39]。其中一个原因是,与测量不同,仿真成本更低,耗时更少。在评估危险或难以在现场实现的极端情况时,仿真也可能是唯一实用和安全的方法。利用仿真技术,工程师可以合成虚拟MIMO阵列,并在虚拟交通环境中对其进行测试,然后再构建单个原型。然而,由于77 GHz计算域的巨大电尺寸,通过模拟获得合成雷达回波带来了独特的挑战。商用雷达传感器的典型最大探测距离为300米[40],对应于77 GHz时的约75,000λ。一个有目标的全尺寸交通场景的大小很容易达到数十亿立方波长。因此,使用全波方法,如有限元法(FEM)变得非常低效,如果不是不可能的话。采用不同的射击和弹跳射线(SBR)方法实现的光线追踪渐近技术已被用于解决这一挑战[20]、[31]、[32]、[33]、[34]、[35]、[36]、[37]、[38]、[39]。文献[31]进行了基于面的混合仿真,以确定海上场景中多径传播对低空目标雷达截面的影响。在[33]、[35]和[34]中,射线追踪技术被用于获得车辆的距离-多普勒图和微多普勒响应。
虽然射线追踪技术使得仿真大型电磁问题成为可能,但雷达仿真带来了独特的额外挑战。具体来说,使用的光线追踪、渐近技术是频域解决方案。因此,多普勒频移不能直接从FMCW chirp信号带宽的单一频率扫描模拟中计算出来。相反,需要进行多次连续的静态仿真,以获得单个相干处理间隔(CPI)的足够数据[33]。每个静态仿真都被转换为反映脉冲重复间隔(PRI)内移动的距离。然后通过进行二维快速反傅立叶变换(IFFT)获得单个距离-多普勒图[20],[33]。因此,需要进行数百次仿真才能获得一个距离-多普勒图。在仿真MIMO阵列时引入了另一层复杂性。假设具有NC个虚拟通道的MIMO阵列,仿真次数以NC的倍数增加。
当前用于雷达应用的基于光线跟踪的仿真方法通过在仿真场景中使用确定性和半解析性光线跟踪技术[31]、[34]和基于原语的目标 [41]、[42]、[43]、[44]来减少计算负荷。在[44]中,基于椭球的人体模型被用于确定行走人类的频谱图。文献[43]采用基于点的模型模拟骑车者的微多普勒响应。[32]中使用基于块的车辆模型来获得平行停车场景中车辆的距离-多普勒地图。在使用带有物理光学(PO)的高准确度、射击和反射射线(SBR)求解器时,计算量很大。[32]采用了基于云的光线追踪求解器,并进行了高性能计算。事实上,一个雷达传感器的SBR-PO求解器需要对单个CPI进行128次仿真,在一个8核CPU上进行一个时间步长需要1天的计算时间[33]。这相当于128天的仿真时间来获得一个单一的距离-多普勒图。
在本文中,我们提出了一种计算效率高,高准确度、基于物理的射击和弹跳射线(SBR)仿真方法,可用于获得77 GHz 512通道MIMO传感器的合成4D雷达回波。在这里,使用全尺寸的交通场景与现实的CAD表示的目标。利用仿真得到的雷达回波,我们演示了如何确定距离、速度、方位角和仰角到达角(AoA)。然后使用这里获得的4D数据创建一个点云,将其叠加在原始雷达场景上,以评估结果的准确性。本文模拟了512个距离-多普勒图,得到了每个场景的方位和仰角AoA。
本文有两个主要贡献。首先,我们展示了如何从具有逼真目标模型的4D雷达的全尺寸交通场景中获得高容量、高准确度度、基于物理的雷达返回。具体来说,对于本文给出的4个场景,通过仿真得到了2,048个距离-多普勒图。据作者所知,这是这种规模的第一个4D雷达仿真研究。其次,我们全面展示了应用于仿真雷达回波的后处理工作流,从而在全尺寸交通场景中产生精确的、速度缩放的3D点云。本研究展示了如何将仿真作为一种可行的技术,用于获取准确的、合成的雷达回波,以开发4D雷达信号处理和检测算法。
2 仿真设置和后处理工作流
A 雷达应用的仿真技术
采用Ansys的高频结构模拟器(HFSS)射击和弹跳射线(SBR+)求解器对4D-MIMO雷达传感器进行建模和仿真[36],[45],[46]。HFSS SBR+是一种渐近电磁法求解器,非常适合求解大型电问题。该求解器是几何光学(GO)和物理光学(PO)的结合。在仿真过程中,多个GO射线从发射天线发射。这些GO射线使用发射天线的辐射方向图进行矢量加权。为了保证能量的节约,每条射线都与一个射线管相关联[36]。发射和加权的伽马射线用于在代表场景的CAD上“绘制”和传播PO电流[20],[36],[39]。然后,PO电流再辐射,产生的场有助于散射场。然后在随后的步骤中使用氧化石墨烯来跟踪反射光线的反弹,同时喷涂和辐射PO电流。在这里,我们追踪了5次反弹。这样,HFSS SBR+使用GO将PO的形式主义扩展到多个跳跃。为了提高精度,HFSS SBR+分别应用物理衍射理论(PTD)和爬行波(CW)来校正不连续面和曲面附近的PO电流。利用均匀衍射(UTD)射线理论,PO和PTD电流可以在严格的GO射线阴影区域内传播和绘制。
如前所述,当前光线追踪仿真技术的频域特性要求仿真场景的多个连续“快照”,其空间位移对应于每个目标从一个脉冲到另一个脉冲的运动,以便雷达仿真产生多普勒信息。这种暴力方法显著增加了单帧的仿真时间[33]。在这里,我们利用SBR+中的加速多普勒处理(ADP)特性来加速单个相干处理间隔(CPI)的仿真。ADP利用先验模拟输入,如目标的位置和速度来推断单个脉冲对多个相邻脉冲的响应。假设CPI有N个脉冲,ADP可以实现最多N次的加速度[47]。进一步的加速(5 -10倍)可以通过使用HFSS SBR+中的快速频率环(FFL)特性来实现[48]。在这里,求解器利用射线中包含的几何信息来减少10%带宽下高密度频率扫描的计算成本。汽车雷达中通常使用的FMCW波形非常适合此功能。
B 仿真设置
HFSS SBR+中的仿真设置与作者在[20]中的其他工作密切相关。合成了一个到达方位角和俯仰角的MIMO阵列,如图1所示。为了演示和简单的后期处理,将4D雷达传感器分解为方位角和俯仰角模块,如图1所示。模块中的每个阵列都有8个发射器(Tx)和32个接收器(Rx),每个模块总共提供256个通道。虽然两个模块中存在的通道总数可能用于实现1,024个虚拟通道(16×32),但这里只使用了512个通道。通过增加、减少或移动阵元的位置和间距,可以合成各种可能的MIMO阵列并在仿真中进行测试。由于发射机发射的FMCW相同,如表1所示,因此使用时域复用方案(TDM)实现Tx波形的正交性[20],[28]。

图1 用于4D雷达的512通道MIMO阵列。垂直放置的元素用于仰角AoA(256通道)。水平元素用于方位角AoA(256通道)。
仿真中使用的FMCW信号参数如表1所示。全尺寸CAD模型用于描述后续交通场景中感兴趣的目标。给出了车辆金属部件和道路基础设施的完美电导体边界条件分配。窗户和沥青等介质被赋予分层阻抗边界条件,允许GO射线的传输、反射和折射。人类目标使用单一材料干燥皮肤模型建模[49],[50]。其中,相对介电常数ϵr =6.6,电导率σ=38.38 S/m。采用加速多普勒处理(ADP)和快速频率环(FFL)来加快仿真速度。
表1 仿真设置的雷达参数

C 基于IFFT的距离、多普勒和角度后处理
仿真得到的合成雷达回波在频域内。雷达回波可以在概念上被认为是存在散射体的天线对天线的耦合。总耦合信号是Tx /Rx对之间的直接信号和与环境相互作用后到达Rx的散射信号之和。对于雷达应用,我们只考虑散射信号,因此,雷达回波是散射场s参数。如[20]、[33]、[36]和[32]所示,通过在快速时间维度上进行一维IFFT,可以从单个chirp中获得距离分布。在单个相干处理间隔(CPI)上进行二维IFFT,得到距离-多普勒图[20],[32],[33]。类似的基于IFFT的方法可以跨通道使用,以获得方位角和仰角AoA[20]。
创建一个全尺寸交通场景,如图2所示。在这里,自车处于静止状态,而两辆车分别以14m/s和19m/s的速度接近和驶离自车。这两辆车也正从一座人行天桥下经过。这个场景在77GHz下的电尺寸约为1312.5亿λ3。使用2.6GHz的6核Intel®Core(TM) i7 CPU和NVIDIA Quadro®RTX 5000显卡,所有512个通道的仿真耗时18分34秒。
如果没有方位角和仰角AoA信息,这种情况对汽车雷达来说是一个挑战。具体来说,为了安全通过行人天桥,车辆需要知道通往行人天桥的台阶在道路的一侧。此外,车辆还需要知道人行天桥在道路上方,可以从下面行驶。只有测距和多普勒,人行桥看起来像一个静止的,距离扩展的目标。图3为描述图2所示场景的距离分布、距离-多普勒图、方位角AoA和俯仰角AoA图。正如预期的那样,人行天桥用速度为0米/秒的距离扩展目标来表示。有趣的是,方位角AoA图准确地捕捉了人行天桥及其两侧台阶的鸟瞰图。这里获得的距离、多普勒和AoA信息将在下一节中用于生成4D雷达点云。
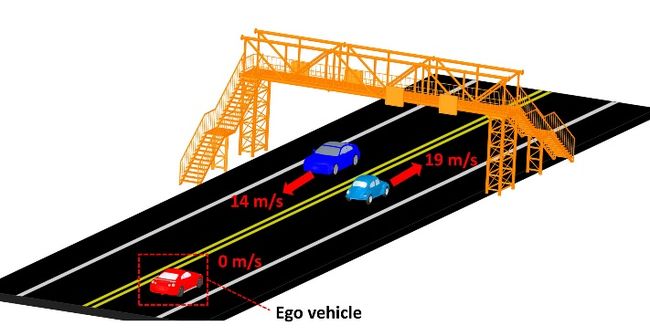
图2 在HFSS SBR+中测试虚拟4D雷达MIMO传感器的全尺寸交通场景显示人行天桥下的两辆车。红色的自车静止不动。MIMO阵列位于自车的前保险杠上,如[20]所示。人行天桥在方位角和俯仰角AoA上都表现为一个复杂的目标。这个场景在77GHz下的电尺寸约为1312.5亿λ3。

图3 图2所示全尺寸场景的距离分布图、距离-多普勒图、方位角与距离图、俯仰角与距离图。这个场景在77GHz下的电尺寸约为1312.5亿λ3。
D 4D雷达点云生成
4D雷达点云生成后处理流程如图4所示。这里,合成雷达回波是由前几节中描述的HFSS SBR+仿真获得的。然后使用二维IFFT获得所有512通道的距离-多普勒图。将距离-多普勒图(RDM)分组以确定方位和俯仰角AoA。然后将来自单个通道的RDM馈送到单元平均(CA)恒虚警率检测器(CFAR)[24]以产生命中矩阵。然后将该命中矩阵掩模应用于通道RDM以确定方位和俯仰到达角(AoA)。这里,使用传统的Bartlett波束形成器进行二维角度估计[23]。使用每次探测的距离、多普勒、方位和俯仰AoA来创建目标列表。在Scientific Python Development Environment (Spyder)[51]中使用PyVista[53]创建了一个速度彩色点云。最后,利用PyAEDT[52]从HFSS SBR+获取三维全尺寸交通场景,并利用PyVista与4D-radar点云网格同步绘制。利用图3中的距离、多普勒和AoA信息,按照图4所示的后期处理流程,创建一个覆盖在图5所示原始场景上的速度缩放的4D雷达点云。如图5所示,4D雷达准确地提取了3个人行天桥断面的静止雷达回波。人行天桥下的剩余区域没有任何固定雷达回波(绿色)。人行天桥下车辆的雷达回波显示了车辆的正确高度以及正确的正负速度值,如颜色比例所示。另外三个场景将用于测试合成雷达回波的准确性和4D雷达点云生成工作流程的鲁棒性。

图4 从频域仿真合成雷达回波中获取4D雷达点云的后处理工作流程。距离-多普勒图是通过二维IFFT过程获得的。CA-CFAR探测器应用于单距离多普勒图。分别使用PyVista[53]和PyAEDT[52]进行点云创建和场景提取。

图5 速度缩放,4D雷达点云覆盖在全尺寸交通场景。人行天桥上的静态回波被精确地放置,在车辆和行人桥之间留下清晰的区分。(红色)自车显示在图的左下角。三维点云中每个点的相应颜色编码的仿真速度(以m/s为单位)由颜色条显示。除了点云球体之外,目标、车辆或物体的颜色与颜色条无关。
3 测试场景
A 场景1
图6显示了在城市等高密度城市位置可能发生的情景。使用2.6GHz的6核Intel®Core(TM) i7 CPU和NVIDIA Quadro®RTX 5000显卡,所有512个通道的仿真耗时10分32秒。在以下所有情况下,自车是静止的。在这里,我们看到一个行人过马路,一辆驶近的车辆,骑自行车的人和地上的井盖。所有这些参与者都存在于一个非常狭窄的视场(FOV)内,因此,在方位角平面上分辨参与者是很重要的。此外,4D雷达还必须准确确定井盖是否固定在地面上,以防止车辆在半自动或全自动驾驶模式下可能发生的紧急制动事件。此类突发制动事件可能会导致乘客因颈部扭伤而受到严重伤害[21]。4D-radar点云准确捕获场景如图6所示。
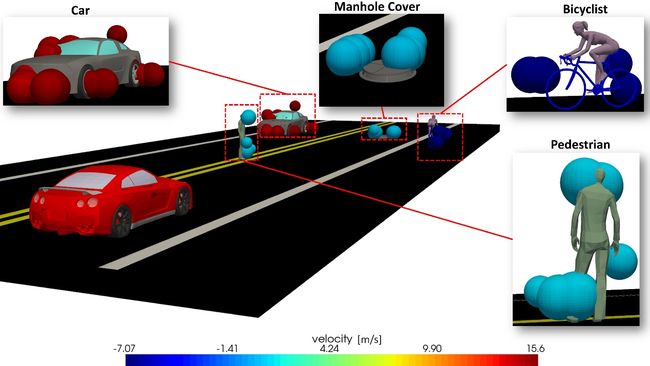
图6 速度缩放,4D雷达点云覆盖在全尺寸交通场景。井盖上的静止回波被精确地放置在地面上,可以进行驾驶操作。(红色)自车显示在图的左下角。三维点云中每个点的相应颜色编码的仿真速度(以m/s为单位)由颜色条显示。除了点云球体之外,目标、车辆或物体的颜色与颜色条无关。
B 场景2
图7显示了由于架空交通标志和井盖而增加复杂性的另一种场景。使用2.6GHz的6核Intel®Core(TM) i7 CPU和NVIDIA Quadro®RTX 5000显卡,所有512个通道的仿真耗时20分6秒。在这里,车辆需要准确判断井盖是否在地面上,是否可以开过去。另一方面,架空道路标志在地面之上,可以从下面行驶。与以前一样,4D雷达点云在距离、多普勒、方位角和俯仰角上准确捕获目标。

图7 速度缩放,4D雷达点云覆盖在全尺寸交通场景。属于道路标志和人孔盖的静态检测仪分别精确地放置在自车的上方和下方。(红色)自车显示在图的左下角。三维点云中每个点的相应颜色编码的仿真速度(以m/s为单位)由颜色条显示。除了点云球体之外,目标、车辆或物体的颜色与颜色条无关。
C 场景3
最后,我们对一个十字路口进行了仿真,如图8所示。使用2.6GHz的6核Intel®Core(TM) i7 CPU和NVIDIA Quadro®RTX 5000显卡,所有512个通道的仿真耗时41分53秒。在这个场景中,关键的参与者是头顶交通标志下的车辆,地面上的井盖和电动垂直起降(eVTOL)飞机。当eVTOL在自车上方飞行时,4D雷达点云精确地将eVTOL置于空中。井盖雷达回波准确地放置在地面上。固定雷达回波属于架空标志的柱子和面板精确放置。然而,在骑行者、交通标志和eVTOL附近观察到少量分散的检测。这些是所谓的“幽灵”目标,在返回传感器之前,由场景中目标之间雷达信号的复杂反射引起。这些“幽灵”目标可以使用传感器融合方法过滤掉。

图8 速度缩放,4D雷达点云覆盖在全尺寸交通场景。机载eVTOL上的探测器精确地放置在自车的上方。由于场景中目标之间复杂的多径反射,也可以观察到“幽灵”检测。(红色)自车显示在图的右下角。三维点云中每个点的相应颜色编码的仿真速度(以m/s为单位)由颜色条显示。除了点云球体之外,目标、车辆或物体的颜色与颜色条无关。
4 结论
雷达已经成为高度自动驾驶到完全自动驾驶汽车的主要环境测绘传感器技术。传统上,在商用车辆上实现雷达技术只允许车辆确定被探测目标的距离和速度。最近实现的MIMO技术为汽车雷达传感器增加了到达角确定功能。4D雷达可以同时确定多个目标的距离、速度、到达方位和俯仰角。仿真已成为获得合成雷达回波的潜在候选方法,用于开发信号处理方法和检测算法。77 GHz交通场景的大电气尺寸、光线追踪电磁求解器的频域性质以及复杂和现实目标的低容量限制了仿真的使用,特别是对于MIMO传感器。在本文中,我们提出了一种计算效率高、高准确度、基于物理的射击和弹跳射线(SBR)仿真方法,可用于获得77 GHz 512通道MIMO传感器的合成4D雷达回波。雷达回波是从全尺寸交通场景获得的。使用基于IFFT的后处理工作流来演示如何从仿真获得的合成雷达回波中提取4D信息。提出了一种4D雷达点云后处理流程,并将提取的点云叠加在不同复杂度的原始交通场景上进行了测试。这项开创性研究的结果表明,基于MIMO的传感器所需的大量合成雷达回波可以通过对4D雷达的仿真准确有效地获得。仿真驱动的数据生成将加速与安全性和舒适性相关的高级驾驶员辅助系统的开发和测试。