MATLAB - MPC - 优化问题(Optimization Problem)
系列文章目录
前言
模型预测控制可在每个控制间隔内解决一个优化问题,具体来说就是二次规划(QP)。求解结果决定了被控对象在下一个控制间隔之前使用的操纵变量(MV)。
该 QP 问题具有以下特点:
- 目标或 "成本 "函数 - 要最小化的控制器性能的非负标量。
- 约束条件 - 解决方案必须满足的条件,如 MV 和被控对象输出变量的物理边界。
- 决策 - 在满足约束条件的同时使成本函数最小化的 MV 调整。
下文将详细介绍这些功能。
一、标准代价函数
标准成本函数是四个项的总和,每个项都侧重于控制器性能的一个特定方面,如下所示:
![]()
这里,zk 是 QP 决策。如下所述,每个项都包含权重,可帮助您平衡相互竞争的目标。虽然 MPC 控制器提供了默认权重,但您通常需要对其进行调整,以适应您的应用。
1.1 输出参考跟踪
在大多数应用中,控制器必须将选定的被控对象输出保持在或接近指定的参考值。MPC 控制器使用以下标量性能指标进行输出参考跟踪:
![$J_{y}(z k)=\sum_{{j}=1}^{n_{y}}\ \sum_{{i}=1}^p\left\{\frac{w_{{i},{j}}^{y}}{s_{{j}}^{y}}[r_{{j}}(k+i\vert k)-y_{{j}}(k+i\vert k)]\right\}^{{2}}.$](http://img.e-com-net.com/image/info8/e2168c479a4b407ea574c1e6f98e84b4.png)
此处
- k - 当前控制间隔。
- p - 预测范围(区间数)。
- ny - 被控对象输出变量的个数。
- zk - QP 决策,取值为
![]()
- yj(k+i|k) - 第 j 个被控对象在第 i 个预测水平步的输出预测值,单位为工程单位。
- rj(k+i|k) - 第 j 个被控对象在第 i 个预测水平步的输出参考值,单位为工程单位。
 - 第 j 个被控对象产量的比例因子,单位为工程单位。
- 第 j 个被控对象产量的比例因子,单位为工程单位。 - 第 i 个预测水平步的第 j 个被控对象输出的调整权重(无量纲)。
- 第 i 个预测水平步的第 j 个被控对象输出的调整权重(无量纲)。
值 ny、p、![]() 和
和 ![]() 是恒定的控制器规格。控制器接收整个预测范围内的参考值 rj(k+i|k)。控制器使用状态观测器来预测被控对象的输出 yj(k+i|k),这些输出取决于受控变量调整 (zk)、测量干扰 (MD) 和状态估计值。在间隔 k 时,可获得控制器状态估计值和 MD 值。因此,Jy 仅是 zk 的函数。
是恒定的控制器规格。控制器接收整个预测范围内的参考值 rj(k+i|k)。控制器使用状态观测器来预测被控对象的输出 yj(k+i|k),这些输出取决于受控变量调整 (zk)、测量干扰 (MD) 和状态估计值。在间隔 k 时,可获得控制器状态估计值和 MD 值。因此,Jy 仅是 zk 的函数。
1.2 操纵变量跟踪
在某些应用中,例如当被控对象的输出多于操纵变量时,控制器必须将选定的操纵变量 (MV) 保持在或接近指定的目标值。MPC 控制器使用以下标量性能指标进行操纵变量跟踪:
![$J_{u}(z k)=\sum_{j=1}^{n_{u}}\sum_{i=0}^{p-1}\left\{\frac{w_{i,j}^{u}}{s_{j}^{u}}[u_{j}(k+i\vert k)-u_{j,l a r g e t}(k+i\vert k)]\right\}^{2}.$](http://img.e-com-net.com/image/info8/8c58177f44d14ea482575a0d8fd5c3a3.png)
此处
- k - 当前控制间隔。
- p - 预测范围(区间数)。
- nu - 受控变量的数量。
- zk - QP 决策,取值为
- uj,target(k+i|k) - 第 j 个 MV 在第 i 个预测水平步的目标值,单位为工程单位。
 - 第 j 个 MV 的比例因子,单位为工程单位。
- 第 j 个 MV 的比例因子,单位为工程单位。 - 第 j 个 MV 在第 i 个预测水平步的调整权重(无量纲)。
- 第 j 个 MV 在第 i 个预测水平步的调整权重(无量纲)。
数值 nu、p、![]() 和
和 ![]() 是恒定的控制器规格。控制器接收整个范围内的 uj,target(k+i|k) 值。控制器利用状态观测器预测被控对象的输出。因此,Ju 只是 zk 的函数。
是恒定的控制器规格。控制器接收整个范围内的 uj,target(k+i|k) 值。控制器利用状态观测器预测被控对象的输出。因此,Ju 只是 zk 的函数。
1.3 操纵变量移动抑制
大多数应用都喜欢小的 MV 调整(移动)。MPC 常量使用以下标量性能指标来抑制操纵变量移动:
![$J_{\Delta u}(z_{k})=\sum_{j=1}^{n_{u}}\sum_{i=0}^{p-1}\left\{\frac{\displaystyle w_{i,j}^{\Delta u}}{\displaystyle s_{j}^{{u}}}[u_{j}(k+i\vert k)-u_{j}(k+i-1\vert k)]\right\}^{2}.$](http://img.e-com-net.com/image/info8/3fae3db474624646a1b98e73d8340147.png)
此处
- k - 当前控制间隔。
- p - 预测范围(区间数)。
- ny - 被控对象输出变量的个数。
- zk - QP 决策,取值为
![]()
- - 第 j 个 MV 的比例因子,单位为工程单位。
 - 第 j 个 MV 运动在第 i 个预测水平步的调整权重(无量纲)。
- 第 j 个 MV 运动在第 i 个预测水平步的调整权重(无量纲)。
![]() 的值是控制器的常数。u(k-1|k) = u(k-1),是上一个控制区间的已知 MV。JΔu 仅是 zk 的函数。
的值是控制器的常数。u(k-1|k) = u(k-1),是上一个控制区间的已知 MV。JΔu 仅是 zk 的函数。
此外,控制区间 m < p(或 MV 阻塞)会限制某些 MV 移动为零。
1.4 违反约束
在实践中,违反约束可能是不可避免的。软约束允许在这种情况下获得可行的 QP 解决方案。MPC 控制器采用一个无量纲、非负的松弛变量 εk,它量化了最坏情况下的约束违规。(见约束条件)相应的性能指标为
![]()
这里
zk - QP 决策,取值为
![]()
εk - 控制区间 k 的松弛变量(无量纲)。
ρε - 违反约束条件的惩罚权重(无量纲)。
二、 替代成本函数
您可以选择使用以下替代标准成本函数的方法:
这里,Q(ny-by-ny)、Ru 和 RΔu(nu-by-nu)是正半无穷权重矩阵,并且:
也是、
Sy - 被控对象输出可变比例系数的对角矩阵,单位为工程单位。
Su - 以工程单位表示的 MV 比例因子对角矩阵。
r(k+1|k) - 第 i 个预测水平步的 ny 个被控对象输出参考值,单位为工程单位。
y(k+1|k) - 第 i 个预测水平步的 ny 个被控对象的工厂产出,单位为工程单位。
zk - QP 决策,取值为
![]()
utarget(k+i|k) - u(k+i|k) 对应的 nu MV 目标值,单位为工程单位。
与标准成本函数一样,输出预测使用状态观测器。
替代成本函数允许非对角线加权,但要求每个预测水平步的权重相同。
如果满足以下条件,替代成本函数和标准成本函数是相同的:
- 标准成本函数采用的权重 w , 和 w 相对于指数 i = 1:p 是常数。
- 矩阵 Q、Ru 和 RΔu 是对角线,对角元素是这些权重的平方。
三、约束条件
某些约束条件是隐含的。例如,控制范围 m < p(或 MV 阻塞)会强制某些 MV 增量为零,而用于被控对象输出预测的状态观测器是一组隐式相等约束。您可以配置的显式约束如下所述。
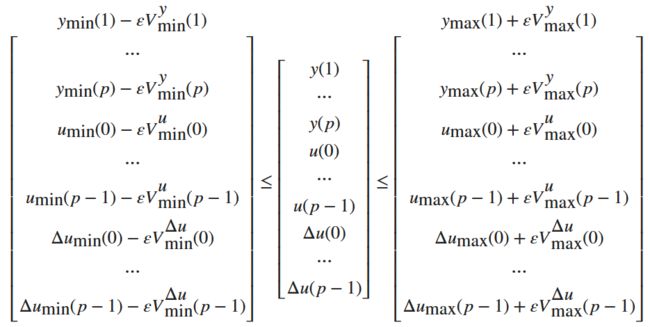
3.1 被控对象输出、MV 和 MV 增量的界限
最常见的 MPC 约束是边界,如下所示。
这里的 V 参数(ECR 值)是无量纲控制器常数,类似于成本函数权重,但用于约束软化(参见约束软化)。此外还有
εk - 用于约束软化的标量 QP 松弛变量(无量纲)。
syj - 第 j 个被控对象输出的比例因子,单位为工程单位。
suj - 第 j 个 MV 的比例因子,单位为工程单位。
yj,min(i)、yj,max(i) - 第 j 个被控对象在第 i 个预测水平步的产量下限和上限,单位为工程单位。
uj,min(i)、uj,max(i) - 第 j 个 MV 在第 i 个预测水平步的下限和上限,单位为工程单位。
Δuj,min(i)、Δuj,max(i) - 第 i 个预测水平步的第 j 个 MV 增量的下限和上限,单位为工程单位。
除松弛变量非负条件外,上述所有约束条件都是可选的,默认为非活动状态(即初始化为无限极限值)。要包含约束条件,必须在设计控制器时指定有限极限值。
四、QP 矩阵
本节介绍与优化问题中描述的模型预测控制优化问题相关的矩阵。
4.1 预测
假设输入干扰模型中描述的干扰模型为单位增益,即 d(k) = nd(k) 为白高斯噪声。可以将此问题表示为
那么,预测模型就是
![]()
![]()
接下来,考虑预测模型在时间 k=0 时的未来轨迹问题。对所有预测时刻 i 设置 nd(i)=0,得到
![$y(i|0)=C\left[A^{i}x(0)+\sum_{h=0}^{i-1}A^{i-1}\left(B_{u}\left({{u(-1)+\sum_{j=0}^{h}}{\Delta u(j)}}\right)+B_{\nu}v(h)\right)\right]+D_{\nu}v(i)$](http://img.e-com-net.com/image/info8/9ca8bd9c06d34c608112244a9e369314.png)
该方程给出的解是
其中
4.2 优化变量
设 m 为自由控制移动的次数,设 z= [z0; ...; zm-1]。那么
![$\left[\begin{array}{c}{{\Delta u(0)}}\\ {{\ldots}}\\ {{\Delta u(p-1)}}\end{array}\right]=J M\left[\begin{array}{c}{{z0}}\\ {{z m-1}}\end{array}\right]$](http://img.e-com-net.com/image/info8/5fbfc810ca524feeaee6094fa325659e.png)
其中,JM 取决于阻塞动作的选择。z0、......、zm-1 与松弛变量ɛ 一起构成了优化问题的自由优化变量。在系统只有一个操纵变量的情况下,z0、......、zm-1 是标量。
考虑下图中描述的阻塞动作。
阻塞移动: 移动 = [2 3 2] 的输入和输入增量
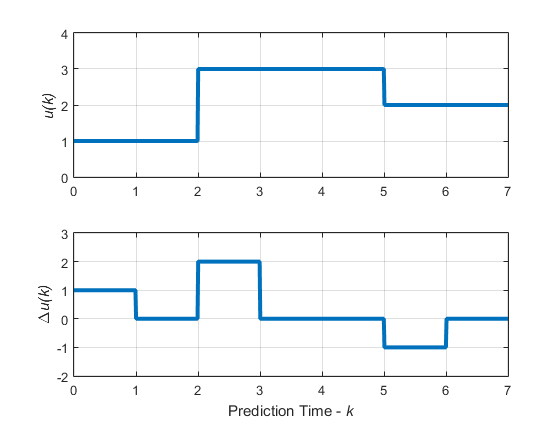
这个图形对应于选择 moves=[2 3 2],或者等价于 u(0)=u(1),u(2)=u(3)=u(4),u(5)=u(6),Δ u(0)=z0,Δ u(2)=z1,Δ u(5)=z2,Δ u(1)=Δ u(3)=Δ u(4)=Δ u(6)=0.
那么,相应的矩阵 JM 为
有关操纵变量阻塞的更多信息,请参阅操纵变量阻塞。
4.3 成本函数
标准形式。 要优化的函数是
其中
![]()
![]()
![]()
最后,在代入 u(k)、Δu(k)、y(k)之后,J(z) 可重写为
其中
![$c_{y}=S_{X}x(0)+S_{u}1u(-1)+H_{v}\left[\begin{array}{l}{{v(1)}}\\ {{\cdots}}\\ {{v(p)}}\end{array}\right]-\left[\begin{array}{l}{{r(1)}}\\ {{\cdots}}\\ {{r(p)}}\end{array}\right]$](http://img.e-com-net.com/image/info8/4242877e6e554bf8880d81151f08ca96.png)
注意事项
您可能希望 QP 问题保持严格的凸性。如果 Hessian 矩阵 KΔU 的条件数大于 1012,请在每个对角项上添加 10*sqrt(eps)。只有当所有输入率都未受惩罚(WΔu=0)时,才能使用此解决方案(请参阅 mpc 对象的权重属性)。
替代成本函数。 如果使用 "替代成本函数 "中所示的替代成本函数,则等式 1 由以下公式代替:

在这种情况下,分块对角矩阵重复 p 次,例如,预测范围内每一步重复一次。
您也可以选择使用标准形式和替代形式的组合。更多信息,请参阅 mpc 对象的权重属性。
约束条件 接下来,考虑输入、输入增量和输出的限制以及约束条件 ɛ≥ 0。
注释
为减少计算量,控制器会自动消除无关的约束条件,如无限边界。因此,实时使用的约束集可能远小于本节建议的约束集。
与计算成本函数类似,可以将 u(k)、Δu(k)、y(k) 代入,得到