基于深度学习的车型检测系统(含UI界面、yolov5、Python代码、数据集)


项目介绍
项目中所用到的算法模型和数据集等信息如下:
算法模型:
yolov5
yolov5主要包含以下几种创新:
1. 添加注意力机制(SE、CBAM、CA等)
2. 修改可变形卷积(DySnake-主干c3替换、DySnake-所有c3替换)
数据集:
网上下载的数据集,大约9850张左右,详细介绍见数据集介绍部分。
以上是本套代码的整体算法架构和对目标检测模型的修改说明,这些模型修改可以为您的 毕设、作业等提供创新点和增强模型性能的功能 。
如果要是需要更换其他的检测模型,请私信。
注:本项目提供所用到的所有资源,包含 环境安装包、训练代码、测试代码、数据集、视频文件、 界面UI文件等。
项目简介
在本文中,我们将详细介绍如何利用深度学习中的YOLOv5算法来实现对车型的检测,并结合PyQt5设计了一个简约而强大的系统UI界面。通过该界面,您可以轻松选择自己的视频文件或图片文件进行检测,并且还能够根据需要替换训练好的yolov5模型,以适应不同的数据检测需求。
我们的系统界面不仅外观优美,而且具备出色的检测精度和强大的功能。它支持多目标实时检测,并允许您自由选择感兴趣的检测目标。
本博文提供了完整的Python程序代码和使用教程,非常适合新入门者参考学习。您可以通过文末的下载链接获取完整的代码资源文件。以下是本博文的目录大致内容:
目录
- 项目介绍
- 项目简介
- 效果展示:
- 一、环境安装
- 二、数据集介绍
- 三、 目标检测介绍
-
- yolov5相关介绍
-
- 1. YOLOv5的网络结构
- 2. 输入端
- 3. Backbone
- 4. Neck
- 5. Head
- 6、训练策略
- 四、 yolov5训练步骤
-
- 五、 yolov5评估步骤
- 六、 训练结果
- 下载链接
效果展示:
功能:
1. 支持单张图片识别
2. 支持遍历文件夹识别
3. 支持识别视频文件
4. 支持结果导出(xls、csv两种格式)
5. 支持切换检测到的目标
一、环境安装
本项目提供所有需要的环境安装包(python、pycharm、cuda、torch等),可以直接按照视频讲解进行安装。具体的安装流程见此视频:视频链接
环境安装视频是以车牌项目为例进行讲解的,但是可以适用于任何项目。
视频快进到 3:18 - 21:17,这段时间讲解的是环境安装,可直接快进到此处观看。

环境安装包可通过百度网盘下载:
链接:https://pan.baidu.com/s/17SZHeVZrpXsi513D-6KmQw?pwd=a0gi
提取码:a0gi
–来自百度网盘超级会员V6的分享
上面这个方法,是比较便捷的安装方式(省去了安装细节),按照我的视频步骤和提供的安装包安装即可,如果要是想要多学一点东西,可以按照下面的安装方式走一遍,会更加熟悉。
环境安装方法2:
追求快速安装环境的,只看上面即可!!!
下面列出了5个步骤,是完全从0开始安装(可以理解为是一台新电脑,没有任何环境),如果某些步骤已经安装过的可以跳过。下面的安装步骤带有详细的视频讲解和参考博客,一步一步来即可。另外视频中讲解的安装方法是通用的,可用于任何项目。
- python环境安装:B站视频讲解
- cuda、cudnn安装:B站视频讲解
- torch安装: B站视频讲解
- pycharm安装: B站视频讲解
- 第三方依赖包安装: B站视频讲解
按照上面的步骤安装完环境后,就可以直接运行程序,看到效果了。
二、数据集介绍
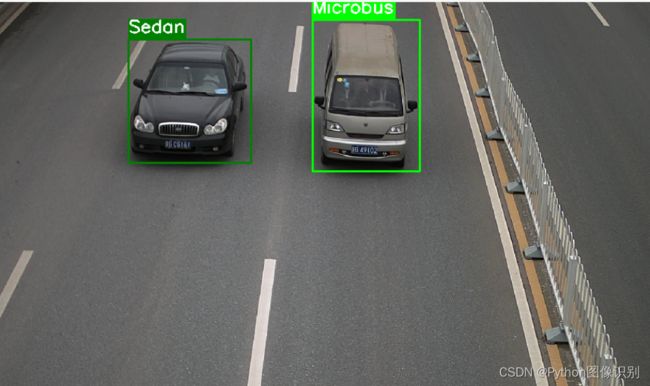
BIT-Vehicle数据集是国内车辆检测数据集,包含9850个车辆图像。数据集中有两个摄像头在不同时间和地点拍摄的大小为16001200 和19201080的图像。 图像包含照明条件、比例、车辆表面颜色和视点的变化。
由于捕获延迟和车辆的大小,某些车辆的顶部或底部未包含在图像中。一幅图像中可能有一两辆车,因此每辆车的位置都被预先标注。 该数据集还可用于评估车辆检测的性能。 数据集中的所有车辆分为6类:公共汽车(Bus)、微型客车(Microbus)、小型货车(Minivan)、轿车(Sedan)、SUV(SUV) 和卡车(Truck)。 每种车型的车辆数量分别为558辆、883辆、476辆、5922辆、1392辆和822辆;
原始标注文档是Matlab数据格式保存(VehicleInfo.mat),现已经将标注格式转换其VOC数据格式了,可以直接用于深度学习目标检测模型训练。
Bus # 公共汽车
Microbus # 微型客车
Minivan # 小型货车
SUV # SUV车
Sedan # 轿车
Truck # 卡车
标注好的数据样式如下:
三、 目标检测介绍
yolov5相关介绍
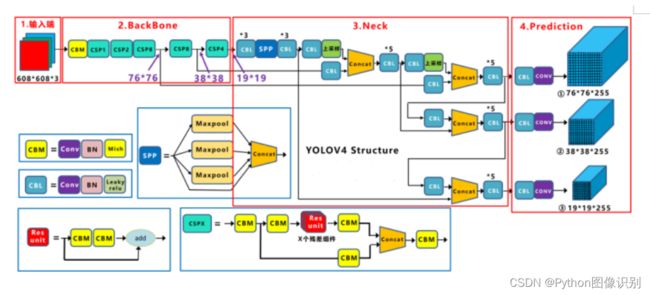
1. YOLOv5的网络结构
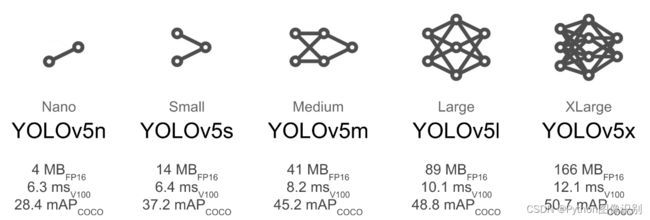
YOLOV5有YOLOv5n,YOLOv5s,YOLOv5m,YOLOV5l、YOLO5x五个版本。这个模型的结构基本一样,不同的是deth_multiole模型深度和width_multiole模型宽度这两个参数。就和我们买衣服的尺码大小排序一样,YOLOV5n网络是YOLOV5系列中深度最小,特征图的宽度最小的网络。其他的三种都是在此基础上不断加深,不断加宽。不过最常用的一般都是yolov5s模型。
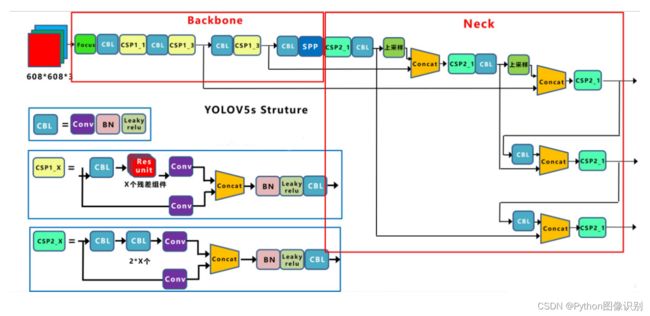
yolov5s 网络架构如下:
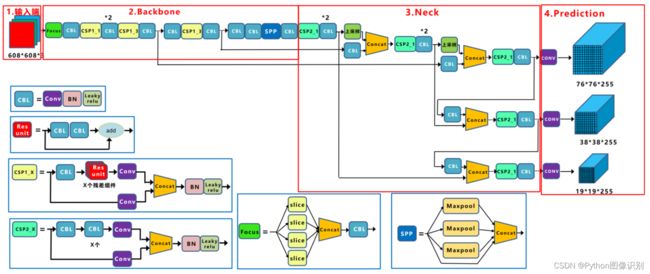
(1)输入端: Mosaic数据增强、自适应锚框计算、自适应图片缩放
(2)Backbone: Focus结构、CSP结构
(3)Neck: FPN+PAN结构
(4)Prediction: GIOU_Loss
基本组件:
- Focus: 基本上就是YOLO v2的passthrough.
- CBL: 由Conv+Bn+Leaky_relu激活函数三者组成
- CSP1 X: 借鉴CSPNet网络结构,由三个卷积层和X个Res unint模块Concate组成
- CSP2 X: 不再用Res unint模块,而是改为CBL。
- SPP: 采用1x1,5x5,9x9,13x13的最大池化的方式,进行多尺度融合
2. 输入端
(1)Mosaic数据增强
YOLO5在输入端采用了 Mosaic数据增强 ,Mosaic 数据增强算法将多张图片按照一定比例组合成一张图片,使模型在更小的范围内识别目标。Mosaic 数据增算法参考 CutMix数增强算法。CutMix数据增强算法使用两张图片进行拼接,而 Mosaic 数据增强算法一般使用四张进行拼接,但两者的算法原理是非常相似的。
Mosaic数据增强的主要步骤为:
(1) 随机选取图片拼接基准点坐标 (xc,yc),另随机选取四张图片。
(2)四张图片根据基准点,分别经过尺寸调整和比例缩放后,放置在指定尺寸的大图的左上,右上,左下,右下位置。
(3) 根据每张图片的尺寸变换方式,将映射关系对应到图片标签上。
(4)依据指定的横纵坐标,对大图进行拼接。处理超过边界的检测框坐标。
采用Mosaic数据增强的方式有几个优点:
(1)丰富数据集: 随机使用4张图像,随机缩放后随机拼接,增加很多小目标,大大增加了数据多样性
(2)增强模型鲁棒性: 混合四张具有不同语义信息的图片,可以让模型检测超出常规语境的目标.
(3)加强批归一化层(Batch Normalization) 的效果: 当模型设置 BN 操作后,训练时会尽可能增大批样本总量 (BatchSize),因为BI 原理为计算每一个特征层的均值和方差,如果批样本总量越大,那么 BN 计算的均值和方差就越接近于整个数据集的均值和方差,效果越好。
(4)Mosaic 数据增强算法有利于提升小目标检测性能: Mosaic 数据增强图像由四张原始图像拼接而成,这样每张图像会有更大概率有含小目标,从而提升了模型的检测能力。
(2) 自适应锚框计算
**之前我们学的 YOLOV3、YOLv4,对于不同的数据集,都会计算先验框 anchor。**然后在训练时,网络会在 anchor 的基础上进行预测,输出预测框,再和标签框进行对比,最后就进行梯度的反向传播。
在YOLOV3、YOLOV4 中,训练不同的数据集时,是使用单独的脚本进行初始锚框的计算,在 YOLOV5 中,则是将此功能嵌入到整个训练代码里中。所以在每次训练开始之前,它都会根据不同的数据集来自适应计算 anchor。
自适应的计算具体过程:
①获取数据集中所有目标的宽和高
②将每张图片中按照等比例缩放的方式到 resize 指定大小,这里保证宽高中的最大值符合指定大小。
③将 bboxes 从相对坐标改成绝对坐标,这里乘以的是缩放后的宽高。
④筛选 bboxes,保留宽高都大于等于两个像素的 bboxes.
⑤使用 k-means 聚类三方得到n个 anchors,与YOLOv3、YOLOv4 操作一样
⑥使用遗传算法随机对 anchors 的宽高进行变异。倘若变异后的效果好,就将变异后的结果赋值给 anchors;如果变异后效果变差就跳过,默认变异1000次。这里是使用 anchor fitness 方法计算得到的适应度 fitness,然后再进行评估。
(3)自适应图片缩放
在常用的目标检测算法中,不同的图片长宽也不相同,因此常用的方式是将原始图片统一缩放到一个标准尺寸,在送入检测网络中。
比如yolo算法中常用416416,608608等尺寸,比如对下面800*600的图像进行缩放。

但yolov5代码中对此进行了改进,也是yolov5推理速度能够很快的一个不错的trick。
作者认为,在项目实际使用时,很多图片的长宽比不同,因此缩放填充后,两端的黑边大小都不同,而如果填充的比较多,则存在信息冗余,影响推理速度。
因此在yolov5的代码中datasets.py的letterbox函数进行了修改,对原始图像自适应的添加最少的黑边。

图像高度上两端的黑边变少了,在推理时,计算量也会减少,即目标检测速度会得到提升。
通过这种简单的改进,推理速度得到了37%的提升,可以说效果很明显。
3. Backbone
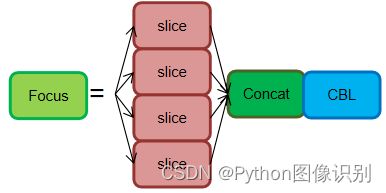
(1)Focus结构
Focus模块在YOLOV5中是图片进入Backbone前,对图片进行切片操作,具体操作是在一张图片中每隔一个像素拿到一个值,类似于邻近下采样,这样就拿到了四张图片,四张图片互补,长得差不多,但是没有信息丢失,这样一来,将W、H信息就集中到了通道空间,输入通道扩充了4倍,即拼接起来的图片相对于原先的RGB三通道模式变成了12个通道,最后将得到的新图片再经过卷积操作,最终得到了没有信息丢失情况下的二倍下采样特征图。
以YOLOV5s为例,原始的640 x 640 x 3的图像输入Focus结构,采用切片操作,先变成320 * 320 12的特征图,再经过一次卷积操作
最终变成320 x 320 x 32的特征图
切片操作如下:
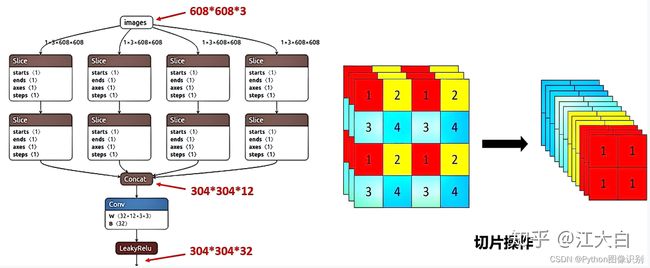
作用: 可以使信息不丢失的情况下提高计算力
不足: Focus 对某些设备不支持目不友好,开销很大,另外切片对不产的话模型就崩了
后期改进: 在新版中,YOLOV5 将Focus 模块替换成了一 6x6 的券积层、两者的计算量是等价的,但是对工一些 GPU 设备,使用6x 6 的卷积会更加高效。
(2)CSP结构
yolov4网络结构中,借鉴了CSPNet的设计思路,在主干网络中设计了CSP结构。
yolov5与yolov4不同点在于,yolov4中只有主干网络使用了CSP结构。 而yolov5中设计了两种CSP结构,以yolov5s网络为例,CSP1_X结构应用于Backbone主干网络,另一种CSP2_X结构则应用于Neck中。
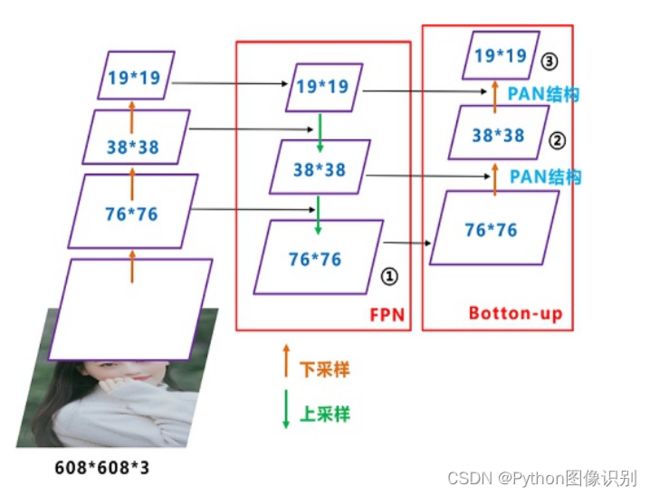
4. Neck
YOLOv5现在的Neck和YOLOV4中一样,都采用FPN+PAN的结构。但是在它的基础上做了-些改进操作: YOLOV4的Neck结构中,采用的都是普通的卷积操作,而YOLOV5的Neck中,采用CSPNet设计的CSP2结构,从而加强了网络特征融合能力。
结构如下图所示,FPN层自顶向下传达强语义特征,而PAN塔自底向上传达定位特征:
5. Head
(1) NMS非极大值抑制
NMS 的本质是搜索局部极大值,抑制非极大值元素.
非极大值抑制,主要就是用来抑制检测时几余的框。因为在目标检测中,在同一目标的位置上会产生大量的候选框,这些候选框相互之间可能会有重叠,所以我们需要利用非极大值抑制找到最佳的目标边界框,消除几余的边界框。
算法流程:
1.对所有预测框的置信度降序排序
2.选出置信度最高的预测框,确认其为正确预测,并计算他与其他预测框的 IOU
3.根据步骤2中计算的IOU 去除重鲁度高的,IOU > threshold 值就直接删除
4.剩下的预测框返回第1步,直到没有剩下的为止
SoftNMS:
当两个目标靠的非常近时,置信度低的会被置信度高的框所抑制,那么当两个目标靠的十分近的时候就只会识别出一个 BBox。为了解决这个问题,可以使用 softNMS。
它的基本思想是用稍低一点的分数来代替原有的分数,而不是像 NMS 一直接置零。
6、训练策略
(1) 多尺度训练 (Multi-scale training) 如果网络的输入是416 x 416。那么训练的时候就会从 0.5 x 416 到 1.5 x 416 中任意取值但所取的值都是32的整数倍。
(2) 训练开始前使用 warmup 进行训练 在模型预训练阶段,先使用较小的学习率训练一些epochs或者steps (如4个 epoch 或10000step ) 再修改为预先设置的学习率进行训练。
(3) 使用了 cosine 学习率下降策略 (Cosine LR scheduler)
(4)采用了 EMA 更新权重(Exponential Moving Average) 相当于训练时给参数赋予一个动量,这样更新起来就会更加平滑
(5) 使用了 amp 进行混合精度训练 (Mixed precision) 能够减少显存的占用并且加快训练速度,但是需要 GPU 支持
四、 yolov5训练步骤
此代码的训练步骤极其简单,不需要修改代码,直接通过cmd就可以命令运行,命令都已写好,直接复制即可,命令如下图:
下面这条命令是 训练 添加 CBAM 注意力机制的命令,复制下来,直接就可以运行,看到训练效果(**需要将coco_NEU-DET.yaml修改为自己的数据集的yaml文件 **)。
python ./train.py --epochs 500 --cfg models/yolov5s-CBAM-2.yaml --hyp data/hyps/hyp.scratch-low.yaml --data data/coco_NEU-DET.yaml --weight weights/yolov5s.pt --workers 4 --batch 16
执行完上述命令后,即可完成训练,训练过程如下:

下面是对命令中各个参数的详细解释说明:
-
python: 这是Python解释器的命令行执行器,用于执行后续的Python脚本。 -
./train.py: 这是要执行的Python脚本文件的路径和名称,它是用于训练目标检测模型的脚本。 -
--epochs 500: 这是训练的总轮数(epochs),指定为500,表示训练将运行500个轮次。 -
--cfg models/yolov5s-CBAM-2.yaml: 这是YOLOv5模型的配置文件的路径和名称,它指定了模型的结构和参数设置。 -
--hyp data/hyps/hyp.scratch-low.yaml: 这是超参数文件的路径和名称,它包含了训练过程中的各种超参数设置,如学习率、权重衰减等。 -
--data data/coco_NEU-DET.yaml: 这是数据集的配置文件的路径和名称,它指定了训练数据集的相关信息,如类别标签、图像路径等。 -
--weight weights/yolov5s.pt: 这是预训练权重文件的路径和名称,用于加载已经训练好的模型权重以便继续训练或进行迁移学习。 -
--workers 4: 这是用于数据加载的工作进程数,指定为4,表示使用4个工作进程来加速数据加载。 -
--batch 16: 这是每个批次的样本数,指定为16,表示每个训练批次将包含16个样本。
通过运行上面这个命令,您将使用YOLOv5模型对目标检测任务进行训练,训练500个轮次,使用指定的配置文件、超参数文件、数据集配置文件和预训练权重。同时,使用4个工作进程来加速数据加载,并且每个训练批次包含16个样本。
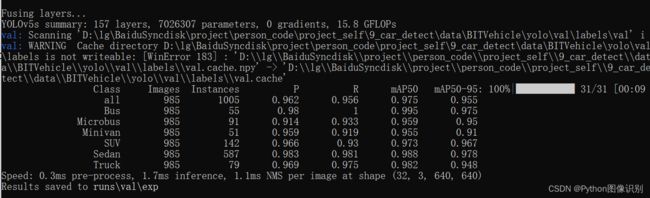
五、 yolov5评估步骤
评估步骤同训练步骤一样,执行1行语句即可,注意--weights需要变为自己想要测试的模型路径,VOC_helmet.yaml替换为自己的数据集的yaml文件。
python ./val.py --data data/VOC_helmet.yaml --weights ../weights/yolov5s.yaml/weights/best.pt
评估结果如下:
六、 训练结果
我们每次训练后,会在 run/train 文件夹下出现一系列的文件,如下图所示:

下载链接
该代码采用Pycharm+Python3.8开发,经过测试能成功运行,运行界面的主程序为main.py,提供用到的所有程序。为确保程序顺利运行,请按照requirements.txt配置Python依赖包的版本。Python版本:3.8,为避免出现运行报错,请勿使用其他版本,详见requirements.txt文件;
若您想获得博文中涉及的实现完整全部程序文件(包括训练代码、测试代码、训练数据、测试数据、视频,py、 UI文件等,如下图),这里已打包上传至博主的面包多平台,可通过下方项目讲解链接中的视频简介部分下载,完整文件截图如下:
项目讲解链接:B站