算法导论复习——CHP24 单源最短路
单源最短路径问题: 给定一个图G =(V,E),找出从给定的源点s∈V到其它每个结点v∈V的最短路径。
这样最短路径具有最优子结构性:两个结点之间的最短路径的任何子路径都是最短的。
基本概念
负权边:权重为负值的边称为负权重的边。 如果存在负权重的边,则有可能存在权重为负值的环路, 而造成图中最短路径无定义(路径的权重为-∞)。
环路:最短路不应包含环路。
简单路径:不包含环路的路径称为简单路径。 对任何简单路径最多包含|V|-1条边和|V|个结点。 不失一般性,假设后续算法寻找的最短路径都不包含环路。
前驱节点:v.π
前驱子图:
,其中
,
终止时,前驱子图是一颗最短路径树(包含了从源结点s到每个可以从s到达的结点的一条最短路径)

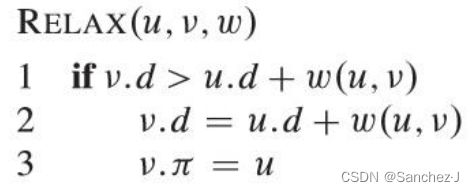
松弛操作(Relax)
最短路径估计
对于每个结点v,维持一个属性v.d,记录从源点s到结点v的最短路径权重的上界。
松弛
首先测试一下是否可以对从s到v的最短路径进行改善。如果可以改善,则v.d更新为新的最短路径估计值,v的前驱v.π更新为新的前驱结点。其中,测试指对s到v所经过的最后一个中 间结点u,按下列方式计算从s出发, 经过u而到达v的路径的权重: 将从结点s到结点u之间最短路 径加上结点u到v之间的边的权重, 然后与当前的s到v的最短路径估计 v.d进行比较,看有没有变小。如果 变小,则对v.d和v.π进行更新—— 这一操作就称为“松弛”
三角形不等式
设G=(V,E)为一个带权重的有向图,其权重函数为 ω:E→R,设其源结点为s。那么对于所有的边(u,v)∈E,有:

上界性质
设G=(V,E)为一个带权重的有向图,其权重函数为 ω:E→R,设其源结点为s。对于所有的结点v∈V,v.d ≥ δ(s,v),并且该不变式在对图G的边进行任何次序的松弛过程中都保持成立,而一 旦v.d取得其下界 δ(s,v)后,将不再发生变化。
非路径性质
给定一个带权重的有向图G=(V,E),其权重函数 为ω:E→R。假定从源结点s到给定点v之间不存在路径,则该图在初始化后,有 v.d≥δ(s,v)=∞, 并且该等式作为不变式一直维持到图G的所有松弛操作结束。
收敛性质
设G=(V,E)为一个带权重的有向图,其权重函 数为ω:E→R。设s∈V为某个源结点, 为图G中的 一条最短路径(u,v∈V)。 如果在对边(u,v)进行松弛操作 之前的某时刻有u.d=δ(s,u),则在该松弛操作之后的所有时刻 有v.d=δ(s,v)
路径松弛性质
设G=(V,E)为一个带权重的有向图,其权重函数为ω:E→R。设s∈V为某个源结点,考虑从源结点s到结点vk 的任意一条最短路径p=![]() ,v0=s。 如果图G进行了一系列边的松弛操作,其中包括对 边(v0 ,v1 )、 (v1 ,v2 )、…、 (vk-1 ,vk )按照所列次序而进行的松弛操作,则在所有这些松弛操作之后,有vk .d=δ(s,vk ),并且在此之后该等式一直保持。
,v0=s。 如果图G进行了一系列边的松弛操作,其中包括对 边(v0 ,v1 )、 (v1 ,v2 )、…、 (vk-1 ,vk )按照所列次序而进行的松弛操作,则在所有这些松弛操作之后,有vk .d=δ(s,vk ),并且在此之后该等式一直保持。
Bellman-Ford算法
可以有负权边,不能有负权环。
可以判断负权环。
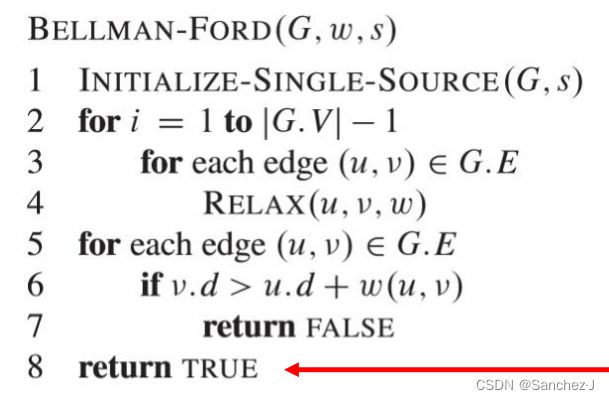
时间复杂度O(VE)
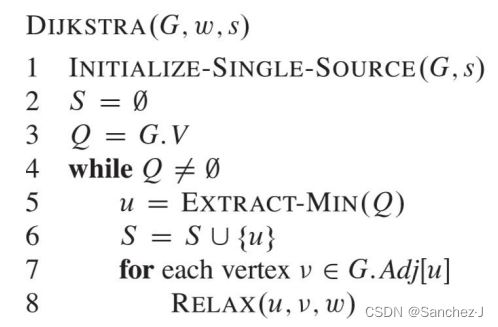
Dijkstra算法
该算法要求所有边的权重均为非负值,即对于所有的边 (u,v)∈E,ω(u,v)≥0。
是一个贪心算法:每次总是选择 V - S 集合中最短路径估计值最小的结点加入S中
时间复杂度分析:
根据算法的处理规则,每个结点 u 仅被加入集合S一次,邻接链表Adj[u]中的每条边在整个运行期间也只被检查一次。因此算法第7-8行的for循环执行次数总共为 |E| 次(即松弛判定总次数)。
Dijkstra算法的总运行时间依赖于最小优先队列Q的实现:
如果用线性数组(无序或者按序插入)实现,每次找d最小的结点u需要 O(V)的时间,所以算法的总运行时间为O(V * V + E)=![]() 。
。
如果用二叉堆实现,每次找d最小的结点u需要O(lgV )的时间,所以 算法的总运行时间为O((V+E)lgV )。
如果用斐波那契堆实现,算法的总运行时间可以改善至O(VlgV+E )。
应用——差分约束系统
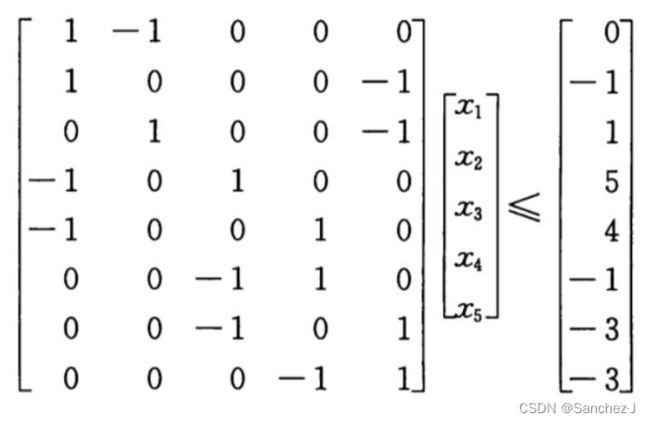
差分约束系统:在一个差分约束系统中,线性规划矩阵A的每一行包括一个 1 和一个 -1 ,其它所有项皆为0。由Ax≤b给出的约束条件形式上是m个涉及n个变量的差额限制条件(difference constraints),每个约束条件是以下简单的线性不等关系:
![]()
如:
现在问题是,如何找出一组解?
引理
设向量x=(x1 ,x2 ,…,xn)为差分约束系统Ax≤b的 一个解,设d为任意常数,则x+d=(x1+d,x2+d,…, xn+d) 也是个该差分约束系统的一个解。
差分约束系统的求解可以转化到图的问题上 :
约束图
在一个 Ax ≤b 的差分约束系统中,将m╳n的矩阵A看成是一 张有n个结点和m条边构成的图的邻接矩阵的转置。
定义如下:
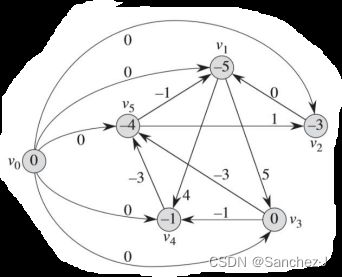
对给定的差分约束系统Ax≤b,其对应的约束图是一个带权重的有向图G=(V,E),这里, 每条有向边对应一个不等式,(v0 ,vi)是从新增的v0到其他所有结点的边
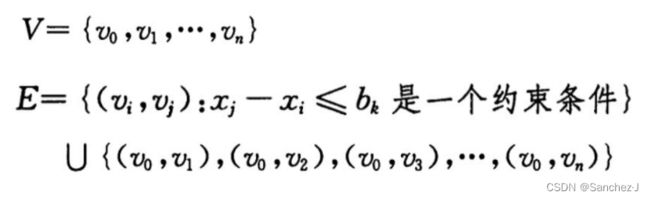
如果 xj - xi ≤ bk是一个差分约束条件,则边(vi,vj) 的权重记为 ω(vi, vj) = bk,而从v0出发到其他结点的边的权重ω(v0 ,vj)=0。
定理
给定差分约束系统Ax≤b,设G=(V,E)是该差分约束系统所对应的约束图。
(1) 如果图G不包含权重为负值的回路,则 是该系统的一个可行解。
是该系统的一个可行解。
(2) 如果图G包含权重为负值的回路,则该系统没有可行解。
因为可能需要判断负环,所以一般用Bellman-Ford算法