opencv-python 学习笔记(9) ------模板匹配与霍夫变换
opencv-python 学习笔记(9) ------模板匹配与霍夫变换
9.1 模板匹配
9.1.1 原理
所谓的模板匹配,就是在给定的图片中查找和模板最相似的区域,该算法的输入包括模板和图片,整个任务的思路就是按照滑窗的思路不断的移动模板图片,计算其与图像中对应区域的匹配度,最终将匹配度最高的区域选择为最终的结果。(有点类似双目立体匹配)。
9.1.2 实现流程
(1)准备两幅图像∶
原图像(L)∶ 在这幅图中,找到与模板相匹配的区域(最左)
模板(T)∶ 与原图像进行比对的图像块(中间)
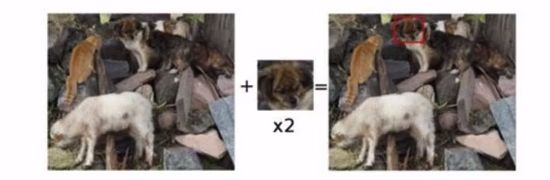
(2)滑动模板图像和原图像进行比对∶

将模板块每次移动一个像素(从左往右,从上往下),在每一个位置,都计算与模板图像的相似程度。·对于每一个位置将计算的相似结果保存在结果矩阵(R)中。如果输入图像的大小(WxH)且模板图像的大小(wxh),则输出矩阵R的大小为(W-w+1,H-h+1)。
(3)获得上述图像后,查找最大值所在的位置,那么该位置对应的区域就被认为是最匹配的。对应的区域就是以该点为顶点,长宽和模板图像一样大小的矩阵。
9.1.3 实现
代码:
cv2.matchTemplate(image,templ,method,[result,mask])
参数∶
imgage :要进行模板匹配的图像·
templ ∶ 模板
method∶ 实现模板匹配的算法,主要有∶
1.平方差匹配(CV_TM_SQDIFF)∶利用模板与图像之间的平方差进行匹配,最好的匹配是0,匹配越差,匹配的值越大。
2.相关匹配(CV_TM_CCORR)∶利用模板与图像间的乘法进行匹配,数值越大表示匹配程度较高,越小表示匹配效果差。
3.利用相关系数匹配(CV_TM_CCOEF)∶利用模板与图像间的相关系数匹配,1表示完美的匹配,-1表示最差的匹配。
(注:完成匹配后,使用cv.minMaxLoc方法查找最大值所在的位置即可。如果使用平方差作为比较方法,则最小值位置就是最佳匹配位置。)
代码:
cv2.minMaxLoc()
参数:src:图像
返回值:最小值,最大值,最小值索引(2维),最大值索引(2维)
例子:
import cv2
target = cv2.imread("2.jpg") # 图像
template = cv2.imread("2.0.jpg") # 模板
theight, twidth = template.shape[:2] # 模板的长、宽
result = cv2.matchTemplate( target , template, cv2.TM_SQDIFF_NORMED,-1) # 模板匹配
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(result) #最小值,最大值,最小值索引(2维),最大值索引(2维)
cv2.rectangle(target, min_loc, (min_loc[0] + twidth, min_loc[1] + theight), (0, 0, 225), 2) #在原图上画长方形(左上右下)
cv2.imshow("aa", target)
cv2.imwrite('matchTemplate.jpg',target)
cv2.waitKey()
cv2.destroyAllWindows()
结果:
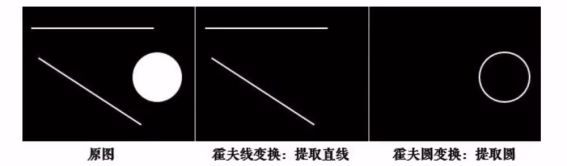
9.2 霍夫变换
用来提取图像中的几何形状,如图:
9.2.1 原理
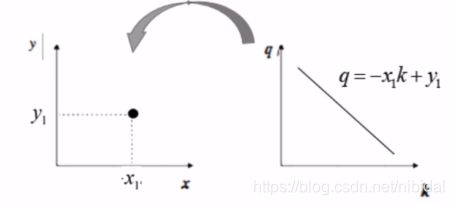
在直角坐标系中,一条直线由A=(x1,y1)和B=(x2,y2)确定,如下图所示:
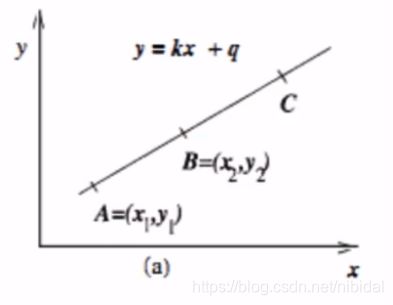
将直线y=kx+q写成关于(k,q)的表达式:
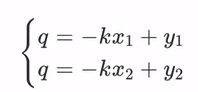
具体变换,如图:
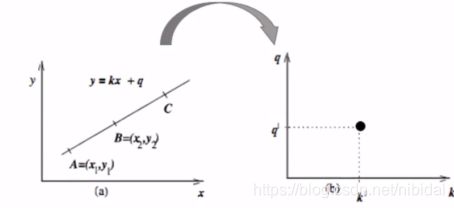
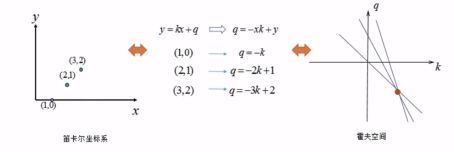
变换后的空间我们叫做霍夫空间。即笛卡尔坐标系中的一条直线,对应于霍夫空间中的一个点。反过来,则霍夫空间中的一条线,对应于笛卡尔坐标系中一个点如下:
而线段的A,B俩点对应情况如下:

(俩条直线相交)
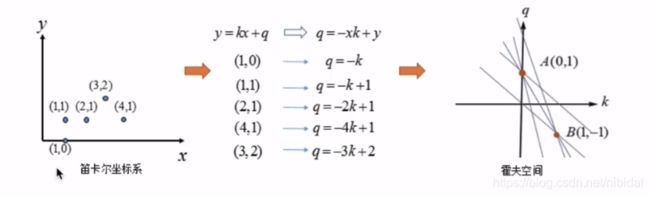
三点共线的情况如下:
由此可知,如果在笛卡尔坐标系的点共线,那么这些点在霍夫空间中对应的直线交于一点。如果不止存在一条直线时,如下所示∶
A,B俩点,将其对应回直角坐标系中的直线:

注:特殊情况,如下图:
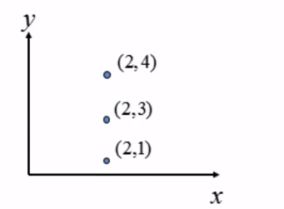
此时无法直接从直角坐标系转化为霍夫坐标系,所以需借助极坐标系。
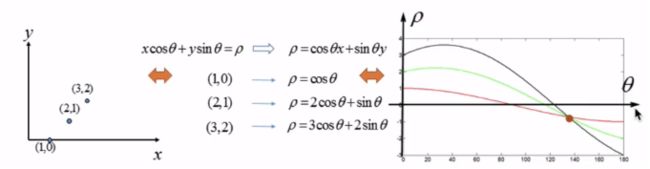
在极坐标下的情况是一样的,极坐标中的点对应于霍夫空间的线,这时的霍夫空间是不在是参数(k,g)的空间,而是(p,θ)的空间,p是原点到直线的垂直距离,θ表示直线的垂线与横轴顺时针方向的夹角,垂直线的角度为 0度,水平线的角度是180度。
我们只需求得霍夫空间的交点的位置,就可得到直角坐标系的直线。
9.2.2 实现流程
实现流程
假设有一个大小为100*100的图片,使用霍夫变换检测图片中的直线,则步骤如下所示∶
(1)直线都可以使用(ρ,θ)表示,首先创建一个2D数组,我们叫做累加器,初始化所有值为0,行表示p,列表示θ。
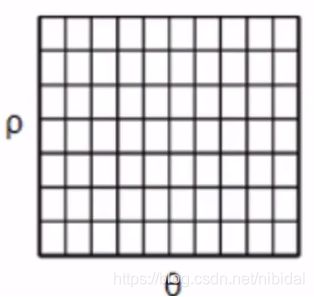
该数组的大小决定了结果的准确性,若希望角度的精度为1度,那就需要180列。对于p,最大值为图片对角线的距离,如果希望精度达到像素级别,行数应该与图像的对角线的距离相等。
(2)取直线上的第一个点(z,y),将其带入直线在极坐标中的公式中,然后遍历θ的取值∶0,1,2,… 180,分别求出对应的p值,如果这个数值在上述累加器中存在相应的位置,则在该位置上加1.·取直线上的第二个点,重复上述步骤,更新累加器中的值。对图像中的直线上的每个点都直线以上步骤,每次更新累加器中的值。
(3) 搜索累加器中的最大值,并找到其对应的(p,θ),就可将图像中的直线表示出来。
9.2.3 实现
代码:
cv2.HoughLines(image,rho,theta,threshold,[lines,srn,stn,min_theta,max_theta])
参数:
Image:图像(二值化的图像);
rho,theta:ρ、θ的精确度;
threshold:阈值,只有累加器的值高于它才是直线。