- 【三维目标检测】Complex-Yolov4详解(二):模型结构
Coding的叶子
Python三维点云实战宝典Complex-YoloComplex-Yolov4三维目标检测目标检测python
本文为博主原创文章,未经博主允许不得转载。本文为专栏《python三维点云从基础到深度学习》系列文章,地址为“https://blog.csdn.net/suiyingy/article/details/124017716”。Complex-Yolo网络模型的核心思想是用鸟瞰图BEV替换Yolo网络输入的RGB图像。因此,在完成BEV处理之后,模型的训练和推理过程基本和Yolo完全一致。Yolov
- 端到端-未来还是现实
Monkey PilotX
自动驾驶人工智能自动驾驶计算机视觉
自动驾驶的“终极梦想”是什么?“自动驾驶不是拼积木,而是教会一台机器像人一样开车。”过去几年,自动驾驶技术在公众视野中经历了从“热血科幻”到“冷静现实”的转变。你可能听过各种术语:L2、L3、NOA、城市领航、BEV感知……但最近,一个词越来越频繁地出现在技术圈和发布会上——端到端(End-to-End)自动驾驶。它听起来像是某种“黑科技”,但又让人摸不着头脑。它到底是什么?和传统的自动驾驶系统有
- Linux指令&&ros学习&&python深度学习&&bug学习笔记
起个别名
LinuxROSPython
##这个文件是关于ros、linux指令,pytorch、python、onnx和相关problem的一些笔记###ROS&&linux**find:在当前路径或指定的路径下递归地搜索文件或目录,并可以根据不同的条件进行过滤和匹配。**```find-name*.pyfind/home/dai/bev_lane_det-main-namemodelsfind/home/dai/bev_lane_d
- BEV+Transformer
Monkey PilotX
自动驾驶transformer深度学习人工智能
在自动驾驶系统中,BEV(Bird’sEyeView)+Transformer主要应用于感知与环境建图(Perception&SceneUnderstanding)环节,尤其是在多传感器融合、目标检测、语义分割、轨迹预测等任务中。在自动驾驶中的关键应用场景应用环节BEV+Transformer的作用感知(Perception)多摄像头图像融合成BEV视角,进行目标检测、语义分割预测(Predict
- BEV开山之作Lift-Splat-Shot (LSS) 深度详解
shuaishuaideyuzi
3D视觉入门人工智能pythonpytorch3d计算机视觉
在自动驾驶感知系统中,将多视角图像转换为鸟瞰图(BEV)是一个关键步骤。Lift-Splat-Shot(LSS)是一种高效的视角转换方法,能够将透视视图特征转换为BEV空间,从而实现更准确的3D物体检测。本文将详细解析LSS的工作原理、技术细节及其应用场景。一、LSS概述LSS(Lift-Splat-Shot)是由PhilippHenzler等人于2021年提出的一种用于自动驾驶感知系统的视角转换
- 【自动驾驶】经典LSS算法解析——深度估计
IRevers
个人学习笔记自动驾驶算法人工智能深度学习python机器学习
LSS-Lift.Splat,Shoot论文题目:Lift,Splat,Shoot:EncodingImagesFromArbitraryCameraRigsbyImplicitlyUnprojectingto3D代码:https://github.com/nv-tlabs/lift-splat-shoot概括:先做深度估计和特征融合,然后投影到BEV视图中,在BEV视图中做特征融合,在融合后的特
- BEV感知算法:自动驾驶的“上帝视角“革命
fmvrj34202
算法
在自动驾驶技术快速发展的今天,BEV(Bird'sEyeView,鸟瞰图)感知算法正成为行业关注的焦点。这项突破性技术通过将多传感器数据统一映射到鸟瞰视角,为自动驾驶系统构建了前所未有的全局环境认知能力,堪称自动驾驶领域的"上帝视角"革命。BEV的核心技术原理BEV感知算法的核心在于将来自摄像头、激光雷达等不同传感器的异构数据,通过深度学习网络统一转换到俯视坐标系。这一过程主要依靠三大关键技术:多
- 【论文笔记】GaussianFusion: Gaussian-Based Multi-Sensor Fusion for End-to-End Autonomous Driving
原文链接:https://arxiv.org/abs/2506.00034v1简介:现有的多传感器融合方法多使用基于注意力的拉直(flatten)融合或通过几何变换的BEV融合,但前者可解释性差,后者计算开销大(如下图(a)(b)所示)。本文提出GaussianFusion(下图(c)),一种基于高斯的多传感器融合框架,用于端到端自动驾驶。使用直观而紧凑的高斯表达,聚合不同传感器的信息。具体来说,
- FB-OCC: 3D Occupancy Prediction based on Forward-BackwardView Transformation
justtoomuchforyou
智驾
NVidia,CVPR20233DOccupancyPredictionChallengeworkshoppaper:https://arxiv.org/pdf/2307.1492code:https://github.com/NVlabs/FB-BEV大参数量imagebackboneInternImage-H,1B外部数据集预训练:object365nuscenes:有点云label,强化网络
- BEV-Fusion环境配置(RTX4090)
BEV-Fusion环境配置(RTX4090)SystemVersionSystemVer.Ubuntu22.04.5LTSKernelVer.6.8.0-57-genericGPU:RTX4090CudaVersionin/usr/local/cudanvcc:NVIDIA(R)CudacompilerdriverCopyright(c)2005-2022NVIDIACorporationBui
- 视觉感知BEV算法学习路线
LQS2020
计算机视觉
学习视觉感知BEV(Bird’sEyeView)算法涉及多个方面的知识和技能。以下是一个系统化的学习路线图,可以帮助你逐步掌握BEV算法。1.基础知识学习1.1计算机视觉基础图像处理:了解图像的基本操作,如滤波、边缘检测、特征提取。推荐书籍:《DigitalImageProcessing》byRafaelC.GonzalezandRichardE.Woods特征提取和描述:学习SIFT、SURF、
- 自动驾驶---感知模型之BEVFormer
智能汽车人
聊聊自动驾驶技术自动驾驶人工智能机器学习
1前言在自动驾驶领域,传统的感知方法通常基于图像或点云的局部视角,这会导致信息的遮挡和理解的局限性。而鸟瞰图(BEV)视角可以提供全局的场景信息,更适合于自动驾驶中的目标检测、轨迹预测等任务。然而,将不同视角的传感器数据转换到BEV空间并进行有效融合是一个挑战。BEVFormer的提出旨在解决这一问题,通过Transformer架构实现高效的多传感器数据融合和BEV特征表示学习。BEVFormer
- 通过 BEV 世界模型进行在线轨迹评估的端到端驾驶
一点.点
#LLME2EVLAVLM等自动驾驶相关论文阅读自动驾驶人工智能
End-to-EndDrivingwithOnlineTrajectoryEvaluationviaBEVWorldModel25年4月来自中科院自动化所和中科院大学端到端自动驾驶通过将感知、预测和规划整合到一个完全可微分的框架中取得了显著进展。然而,为了充分发挥其潜力,有效的在线轨迹评估对于确保安全是必不可少的。通过预测给定轨迹的未来结果,轨迹评估变得更加有效。通过采用世界模型来捕捉环境动态并预
- 【AI】智驾地图在不同自动驾驶等级中的作用演变
giszz
GIS人工智能人工智能自动驾驶机器学习
一、功能价值动态模型:基于自动驾驶等级的权重迁移功能演变四阶段:█辅助阶段(L2):单功能补足→█拓展阶段(L2+NOA):多模态增强→█融合阶段(L3):系统安全基座→█重构阶段(L4):云端协同范式二、核心功能演变深度解析功能模块L2级辅助驾驶L3级有条件自动L4级高度自动技术驱动因素产业案例感知补充几何数据★语义数据★★★动态语义★★BEV+Transformer感知模型崛起TeslaOcc
- 【计算机视觉前沿研究 热点 顶会】CVPR 2024中与目标检测相关的论文
平安顺遂事事如意
计算机视觉目标检测目标跟踪pytorch机器学习人工智能python
3D目标检测UniMODE:统一的单目3D对象检测实现包括室内和室外场景的统一单目3D对象检测在机器人导航等应用中具有重要意义。然而,涉及数据的各种场景来训练模型会带来挑战,因为它们具有显著不同的特性,例如不同的几何特性和异构的域分布。为了解决这些挑战,我们构建了一种基于鸟瞰图(BEV)检测范式的检测器。LaneCPP:使用物理优先级的连续3D车道检测单目3D车道检测已成为自动驾驶领域的一个基本问
- 论文阅读《BEVFormer v2》
YMWM_
论文论文阅读
BEVFormerv2:AdaptingModernImageBackbonestoBird’s-Eye-ViewRecognitionviaPerspectiveSupervision目录摘要1介绍2相关工作2.1BEV三维目标检测器摘要我们提出了一种具有透视监督的新型鸟瞰图(BEV)检测器,其收敛速度更快并且更适合现代图像主干。现有的最先进的BEV检测器通常与某些深度预训练主干网络(如VoVN
- BEV车道线标注方法详解:4种主流技术对比
_Itachi__
自动驾驶人工智能计算机视觉算法
BEV车道线标注方法详解:4种主流技术对比在自动驾驶领域,鸟瞰图(Bird’sEyeView,BEV)的车道线标注是环境感知的核心任务之一。BEV视角能直观展示车辆周围的道路结构,但如何高效、精确地生成BEV车道线标注仍是一个技术难点。本文将从实际应用出发,详细介绍4种主流的BEV车道线标注方法,并分析其优缺点与适用场景。1.2D标注+点云深度投影方法概述该方法结合2D图像标注与点云深度信息,通过
- Fast-BEV:A Fast and Strong Bird’s-Eye View Perception Baseline——论文笔记
m_buddy
BEVPerception论文阅读人工智能深度学习
参考代码:Fast-BEV一稿多投的另一篇:Fast-BEV:TowardsReal-timeOn-vehicleBird’s-EyeViewPerception1.概述介绍:这篇文章提供了一种可实际部署的BEV感知方案,能够在当今车端主流计算单元上(NvidiaOrin)实现不错的帧率。从camera到BEV的转换思想来自于M2BEV,但是对这个转换方法中使用查找表和映射方法改进,使得整体视角转
- SparseDrive---论文阅读
SLAM必须dunk
多模态大模型:算法微调应用论文阅读人工智能目标跟踪计算机视觉深度学习
纯视觉下的稀疏场景表示算法动机&开创性思路算法动机:依赖于计算成本高昂的鸟瞰图(BEV)特征表示。预测和规划的设计过于直接,没有充分利用周围代理和自我车辆之间的高阶和双向交互。场景信息是在agent周围提取,没有考虑到自我车辆对周围代理的影响,忽略了自我车辆在运动预测和规划中的作用。运动预测和规划都被视为多模态问题,但现有方法只预测确定性的轨迹,没有考虑到内在的不确定性。开创性思路:为了解决以上问
- Sparse4D: Multi-view 3D Object Detection with Sparse Spatial-Temporal Fusion论文解析
butterfly won't love flowers
稀疏检测任务目标检测人工智能计算机视觉
一、背景对于基于多视角图像的3D目标检测,现有的工作有两个方向,分别是稀疏检测与基于BEV的检测方法。其中BEV方法是将多视图的图像特征转到BEV空间上执行下游任务,但是它的缺点是BEV特征图的构建需要从各个视角特征图进行稠密的采样工作,BEV构建复杂且资源需求高;并且感知范围受BEV特征图尺度的限制,因此需要在感知范围、效率与准确度间权;此外就是BEV特征图将高度维度压缩,导致其对于一些在高度层
- BEVDet: High-Performance Multi-Camera 3D Object Detection in Bird-Eye-View
butterfly won't love flowers
BEV目标检测
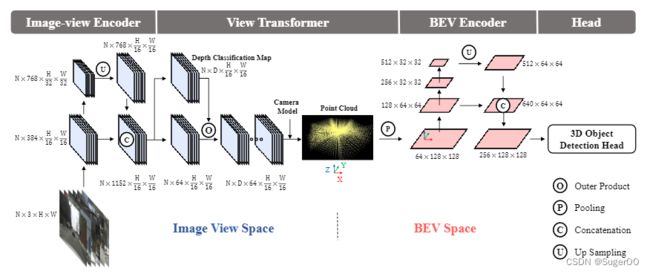
背景在自动驾驶场景下,以往工作是目标检测任务用图像视角做,语义分割用BEV视角做。本文提出了BEVDet,实现了一个统一的框架,它模块化设计分为图像编码器,视角转换器,BEV编码器以及BEV空间的3D检测头。然而框架定下来不代表性能好了,BEVDet在BEV空间上过拟合了,这需要在图像空间增加数据增强,但只有在没有BEVEncoder时才会有正效果。此外,由于图像空间到BEV空间是像素级联系的,图
- BEVDepth: Acquisition of Reliable Depth for Multi-View 3D Object Detection
butterfly won't love flowers
BEV3d目标检测php
背景基于多视角图片的3D感知被LSS证明是可行的,它使用估计的深度将图像特征转化为3D视椎,再将其压缩到BEV平面上。对于这个得到的BEV特征图,它支持端到端训练以及各种下游任务。但是对于深度估计这一块学习的深度质量如何,到目前为止没有相关工作研究。贡献本文的贡献如下:提出了使用点云深度信息显示监督深度预测,提高了深度预测质量将相机参数加入网络中,能够实现camera-aware功能。提出了深度优
- BEVDet4D: Exploit Temporal Cues in Multi-camera 3D Object Detection
butterfly won't love flowers
BEV3d目标检测人工智能
背景对于现有的BEVDet方法,它对于速度的预测误差要高于基于点云的方法,对于像速度这种与时间有关的属性,仅靠单帧数据很难预测好。因此本文提出了BEVDet4D,旨在获取时间维度上的丰富信息。它是在BEVDet的基础上进行拓展,保留了之前帧的BEV特征,并将其进行空间对齐后与当前帧对应BEV特征连接。在nuscenes数据集上证明其可行性发现,不仅速度误差mAVE从0.909降低到0.337,在其
- 【端到端】端到端自动驾驶依赖Occupancy进行运动规划?还是可以具有生成局部地图来规划?
Hali_Botebie
端到端自动驾驶人工智能机器学习
端到端自动驾驶系统的架构设计,目前主流做法实际上已经出现两种路径,我们来拆解一下:一、Occupancy是否用于运动规划?一种趋势是使用Occupancy表示作为中间表征,用于:运动规划:表示可通行区域、障碍物几何形状可行驶空间建模:比BEV更精细地表达边界和障碍物体积不依赖精确物体检测:可以以“可通行/不可通行”为标准做规划典型工作:Wayve(英国自动驾驶公司)的OccupancyMap-ba
- 地平线 LiDAR-Camera 融合多任务 BEVFusion 参考算法-V1.0
算法自动驾驶
该示例为参考算法,仅作为在征程6上模型部署的设计参考,非量产算法。1.简介激光雷达天然地具有深度信息,摄像头可以提供丰富的语义信息,它们是车载视觉感知系统中两个最关键的传感器。但是,如果激光雷达或者摄像头发生故障,则整个感知框架不能做出任何预测,这在根本上限制了实际自动驾驶场景的部署能力。目前主流的感知架构选择在特征层面进行多传感器融合,即中融合,其中比较有代表性的路线就是BEV范式。BEVFus
- BEV感知中如何使用相机内外参?
luoganttcc
机器视觉数码相机
在BEV(Bird's-EyeView)感知中,相机的内参和外参是核心先验知识,用于将2D图像特征精确投影到3D空间并构建俯视视角下的环境表示。以下是相机内外参在BEV感知中的具体应用流程和技术细节:1.核心作用:从图像到BEV空间的几何映射相机的内参和外参共同定义了图像像素与真实世界3D坐标之间的几何关系,通过以下步骤完成BEV投影:(1)图像去畸变(依赖内参)输入:原始图像(含
- C++ C语言Socket库Libevent的粘包处理
面向对象World
C++
voidMDVRConnectClient::on_read(structbufferevent*bev,void*user_data){//获取输入缓冲区中的数据(数据未移走)structevbuffer*input=bufferevent_get_input(bev);size_tcontent_size=evbuffer_get_length(input);if(content_size>0
- 深度学习基础-onnxruntime推理模型
yuweififi
深度学习人工智能
以下是一个完整的示例,展示如何加载ONNX模型、获取模型信息并运行推理:importonnxruntimeimportnumpyasnp#模型路径bev_head_onnx_path="path/to/your/bev_head.onnx"#加载模型session=onnxruntime.InferenceSession(bev_head_onnx_path)#获取模型元信息model_meta=
- 自动驾驶---Perception之大模型应用
智能汽车人
自动驾驶人工智能机器学习
1背景自动驾驶感知(Perception)模块在自动驾驶系统中扮演着至关重要的角色,它负责收集、处理并理解车辆周围的环境信息。随着深度学习技术的快速发展,大模型也逐渐在自动驾驶感知模块中得到了广泛应用。本篇博客主要介绍大模型在感知模块的应用。前面也介绍过如下几篇Perception相关的文章,有兴趣的读者可以了解相关内容:《自动驾驶---Perception之IPM图和BEV图》《自动驾驶---P
- 51-29 CVPR 2024 | BEV-Planner:开环端到端自动驾驶中自车状态是你所需要的一切吗?
深圳季连AIgraphX
aiXpilot智驾大模型1自动驾驶人工智能机器学习智慧城市计算机视觉AIGC
本论文是南京大学、英伟达最新CVPR2024工作。蛮幸运的,该论文提出了很多思考,证明了很多最优Paper在落地上车方面的无效性。咱们对待新方法能否成为自动驾驶的最佳实践要审慎。论文名称:IsEgoStatusAllYouNeedforOpen-LoopEnd-to-EndAutonomousDriving?论文链接:https://arxiv.org/abs/2312.03031.代码链接:ht
- mondb入手
木zi_鸣
mongodb
windows 启动mongodb 编写bat文件,
mongod --dbpath D:\software\MongoDBDATA
mongod --help 查询各种配置
配置在mongob
打开批处理,即可启动,27017原生端口,shell操作监控端口 扩展28017,web端操作端口
启动配置文件配置,
数据更灵活
- 大型高并发高负载网站的系统架构
bijian1013
高并发负载均衡
扩展Web应用程序
一.概念
简单的来说,如果一个系统可扩展,那么你可以通过扩展来提供系统的性能。这代表着系统能够容纳更高的负载、更大的数据集,并且系统是可维护的。扩展和语言、某项具体的技术都是无关的。扩展可以分为两种:
1.
- DISPLAY变量和xhost(原创)
czmmiao
display
DISPLAY
在Linux/Unix类操作系统上, DISPLAY用来设置将图形显示到何处. 直接登陆图形界面或者登陆命令行界面后使用startx启动图形, DISPLAY环境变量将自动设置为:0:0, 此时可以打开终端, 输出图形程序的名称(比如xclock)来启动程序, 图形将显示在本地窗口上, 在终端上输入printenv查看当前环境变量, 输出结果中有如下内容:DISPLAY=:0.0
- 获取B/S客户端IP
周凡杨
java编程jspWeb浏览器
最近想写个B/S架构的聊天系统,因为以前做过C/S架构的QQ聊天系统,所以对于Socket通信编程只是一个巩固。对于C/S架构的聊天系统,由于存在客户端Java应用,所以直接在代码中获取客户端的IP,应用的方法为:
String ip = InetAddress.getLocalHost().getHostAddress();
然而对于WEB
- 浅谈类和对象
朱辉辉33
编程
类是对一类事物的总称,对象是描述一个物体的特征,类是对象的抽象。简单来说,类是抽象的,不占用内存,对象是具体的,
占用存储空间。
类是由属性和方法构成的,基本格式是public class 类名{
//定义属性
private/public 数据类型 属性名;
//定义方法
publ
- android activity与viewpager+fragment的生命周期问题
肆无忌惮_
viewpager
有一个Activity里面是ViewPager,ViewPager里面放了两个Fragment。
第一次进入这个Activity。开启了服务,并在onResume方法中绑定服务后,对Service进行了一定的初始化,其中调用了Fragment中的一个属性。
super.onResume();
bindService(intent, conn, BIND_AUTO_CREATE);
- base64Encode对图片进行编码
843977358
base64图片encoder
/**
* 对图片进行base64encoder编码
*
* @author mrZhang
* @param path
* @return
*/
public static String encodeImage(String path) {
BASE64Encoder encoder = null;
byte[] b = null;
I
- Request Header简介
aigo
servlet
当一个客户端(通常是浏览器)向Web服务器发送一个请求是,它要发送一个请求的命令行,一般是GET或POST命令,当发送POST命令时,它还必须向服务器发送一个叫“Content-Length”的请求头(Request Header) 用以指明请求数据的长度,除了Content-Length之外,它还可以向服务器发送其它一些Headers,如:
- HttpClient4.3 创建SSL协议的HttpClient对象
alleni123
httpclient爬虫ssl
public class HttpClientUtils
{
public static CloseableHttpClient createSSLClientDefault(CookieStore cookies){
SSLContext sslContext=null;
try
{
sslContext=new SSLContextBuilder().l
- java取反 -右移-左移-无符号右移的探讨
百合不是茶
位运算符 位移
取反:
在二进制中第一位,1表示符数,0表示正数
byte a = -1;
原码:10000001
反码:11111110
补码:11111111
//异或: 00000000
byte b = -2;
原码:10000010
反码:11111101
补码:11111110
//异或: 00000001
- java多线程join的作用与用法
bijian1013
java多线程
对于JAVA的join,JDK 是这样说的:join public final void join (long millis )throws InterruptedException Waits at most millis milliseconds for this thread to die. A timeout of 0 means t
- Java发送http请求(get 与post方法请求)
bijian1013
javaspring
PostRequest.java
package com.bijian.study;
import java.io.BufferedReader;
import java.io.DataOutputStream;
import java.io.IOException;
import java.io.InputStreamReader;
import java.net.HttpURL
- 【Struts2二】struts.xml中package下的action配置项默认值
bit1129
struts.xml
在第一部份,定义了struts.xml文件,如下所示:
<!DOCTYPE struts PUBLIC
"-//Apache Software Foundation//DTD Struts Configuration 2.3//EN"
"http://struts.apache.org/dtds/struts
- 【Kafka十三】Kafka Simple Consumer
bit1129
simple
代码中关于Host和Port是割裂开的,这会导致单机环境下的伪分布式Kafka集群环境下,这个例子没法运行。
实际情况是需要将host和port绑定到一起,
package kafka.examples.lowlevel;
import kafka.api.FetchRequest;
import kafka.api.FetchRequestBuilder;
impo
- nodejs学习api
ronin47
nodejs api
NodeJS基础 什么是NodeJS
JS是脚本语言,脚本语言都需要一个解析器才能运行。对于写在HTML页面里的JS,浏览器充当了解析器的角色。而对于需要独立运行的JS,NodeJS就是一个解析器。
每一种解析器都是一个运行环境,不但允许JS定义各种数据结构,进行各种计算,还允许JS使用运行环境提供的内置对象和方法做一些事情。例如运行在浏览器中的JS的用途是操作DOM,浏览器就提供了docum
- java-64.寻找第N个丑数
bylijinnan
java
public class UglyNumber {
/**
* 64.查找第N个丑数
具体思路可参考 [url] http://zhedahht.blog.163.com/blog/static/2541117420094245366965/[/url]
*
题目:我们把只包含因子
2、3和5的数称作丑数(Ugly Number)。例如6、8都是丑数,但14
- 二维数组(矩阵)对角线输出
bylijinnan
二维数组
/**
二维数组 对角线输出 两个方向
例如对于数组:
{ 1, 2, 3, 4 },
{ 5, 6, 7, 8 },
{ 9, 10, 11, 12 },
{ 13, 14, 15, 16 },
slash方向输出:
1
5 2
9 6 3
13 10 7 4
14 11 8
15 12
16
backslash输出:
4
3
- [JWFD开源工作流设计]工作流跳跃模式开发关键点(今日更新)
comsci
工作流
既然是做开源软件的,我们的宗旨就是给大家分享设计和代码,那么现在我就用很简单扼要的语言来透露这个跳跃模式的设计原理
大家如果用过JWFD的ARC-自动运行控制器,或者看过代码,应该知道在ARC算法模块中有一个函数叫做SAN(),这个函数就是ARC的核心控制器,要实现跳跃模式,在SAN函数中一定要对LN链表数据结构进行操作,首先写一段代码,把
- redis常见使用
cuityang
redis常见使用
redis 通常被认为是一个数据结构服务器,主要是因为其有着丰富的数据结构 strings、map、 list、sets、 sorted sets
引入jar包 jedis-2.1.0.jar (本文下方提供下载)
package redistest;
import redis.clients.jedis.Jedis;
public class Listtest
- 配置多个redis
dalan_123
redis
配置多个redis客户端
<?xml version="1.0" encoding="UTF-8"?><beans xmlns="http://www.springframework.org/schema/beans" xmlns:xsi=&quo
- attrib命令
dcj3sjt126com
attr
attrib指令用于修改文件的属性.文件的常见属性有:只读.存档.隐藏和系统.
只读属性是指文件只可以做读的操作.不能对文件进行写的操作.就是文件的写保护.
存档属性是用来标记文件改动的.即在上一次备份后文件有所改动.一些备份软件在备份的时候会只去备份带有存档属性的文件.
- Yii使用公共函数
dcj3sjt126com
yii
在网站项目中,没必要把公用的函数写成一个工具类,有时候面向过程其实更方便。 在入口文件index.php里添加 require_once('protected/function.php'); 即可对其引用,成为公用的函数集合。 function.php如下:
<?php /** * This is the shortcut to D
- linux 系统资源的查看(free、uname、uptime、netstat)
eksliang
netstatlinux unamelinux uptimelinux free
linux 系统资源的查看
转载请出自出处:http://eksliang.iteye.com/blog/2167081
http://eksliang.iteye.com 一、free查看内存的使用情况
语法如下:
free [-b][-k][-m][-g] [-t]
参数含义
-b:直接输入free时,显示的单位是kb我们可以使用b(bytes),m
- JAVA的位操作符
greemranqq
位运算JAVA位移<<>>>
最近几种进制,加上各种位操作符,发现都比较模糊,不能完全掌握,这里就再熟悉熟悉。
1.按位操作符 :
按位操作符是用来操作基本数据类型中的单个bit,即二进制位,会对两个参数执行布尔代数运算,获得结果。
与(&)运算:
1&1 = 1, 1&0 = 0, 0&0 &
- Web前段学习网站
ihuning
Web
Web前段学习网站
菜鸟学习:http://www.w3cschool.cc/
JQuery中文网:http://www.jquerycn.cn/
内存溢出:http://outofmemory.cn/#csdn.blog
http://www.icoolxue.com/
http://www.jikexue
- 强强联合:FluxBB 作者加盟 Flarum
justjavac
r
原文:FluxBB Joins Forces With Flarum作者:Toby Zerner译文:强强联合:FluxBB 作者加盟 Flarum译者:justjavac
FluxBB 是一个快速、轻量级论坛软件,它的开发者是一名德国的 PHP 天才 Franz Liedke。FluxBB 的下一个版本(2.0)将被完全重写,并已经开发了一段时间。FluxBB 看起来非常有前途的,
- java统计在线人数(session存储信息的)
macroli
javaWeb
这篇日志是我写的第三次了 前两次都发布失败!郁闷极了!
由于在web开发中常常用到这一部分所以在此记录一下,呵呵,就到备忘录了!
我对于登录信息时使用session存储的,所以我这里是通过实现HttpSessionAttributeListener这个接口完成的。
1、实现接口类,在web.xml文件中配置监听类,从而可以使该类完成其工作。
public class Ses
- bootstrp carousel初体验 快速构建图片播放
qiaolevip
每天进步一点点学习永无止境bootstrap纵观千象
img{
border: 1px solid white;
box-shadow: 2px 2px 12px #333;
_width: expression(this.width > 600 ? "600px" : this.width + "px");
_height: expression(this.width &
- SparkSQL读取HBase数据,通过自定义外部数据源
superlxw1234
sparksparksqlsparksql读取hbasesparksql外部数据源
关键字:SparkSQL读取HBase、SparkSQL自定义外部数据源
前面文章介绍了SparSQL通过Hive操作HBase表。
SparkSQL从1.2开始支持自定义外部数据源(External DataSource),这样就可以通过API接口来实现自己的外部数据源。这里基于Spark1.4.0,简单介绍SparkSQL自定义外部数据源,访
- Spring Boot 1.3.0.M1发布
wiselyman
spring boot
Spring Boot 1.3.0.M1于6.12日发布,现在可以从Spring milestone repository下载。这个版本是基于Spring Framework 4.2.0.RC1,并在Spring Boot 1.2之上提供了大量的新特性improvements and new features。主要包含以下:
1.提供一个新的sprin