KD 树原理详解
一 点睛
KD 树(K-Dimension tree)是可以存储 K 维数据的树,是二叉搜索树的拓展,主要用于多维空间数据的搜索,例如范围搜索和最近邻搜索。BST、AVL、Treap 和伸展树等二叉搜索树的节点存储的都是一维信息,一维数据很容易处理,直接比较数据的大小,满足左子树小于根、右子树大于根即可。多维数据需要选择一个维度 Di,在维度 Di 上进行大小比较。例如,对于二维平面上的两个点 A(2,4)、B(5, 3),按照第 1 维比较,则 AB。
二 创建 KD 树
KD 树是二叉树,表示对 K 维数据的划分,每个节点都对应 K 维空间划分中的超矩形区域,KD 树可以省去大部分的搜索工作,提高搜索效率。
对 K 维数据划分左右子树时,需要考虑两个问题:
① 选择哪个维度划分?
② 选择哪个划分点可以使左右子树的大小大致相等?
众所周知,二叉搜索树在极不平衡的情况下退化为线性,效率最差,在平衡的情况下时间复杂度为 O(logn)。
1 维度划分
维度划分指选择哪一维进行划分,即选择哪一维作为分辨器。KD 树可以根据不同的用途选择不同的分辨器,最常见的是轮转法和最大方差法。
• 轮转法
按照维度轮流作为分辨器,对于二维数据(x , y),第 1 层按 x 划分,第 2 层按 y 划分,第 3 层按 x 划分,以此重复进行。奇数层按 x 划分,偶数层按 y 划分,按照维度轮流划分,创建一棵 KD 树。如同切豆腐块,竖着切一刀,横着切一刀,以此重复进行。扩展到 K 维数据,若当前层按照第 i 维划分,则下一层按照第(i +1) % K 维划分,i=0,1,…, K-1。
最大方差法:若数据在维度D i 上方差最大,则选择维度D i
• 最大方差法
若数据在维度 Di 上方差最大,则选择维度 Di 作为分辨器。方差公式为:
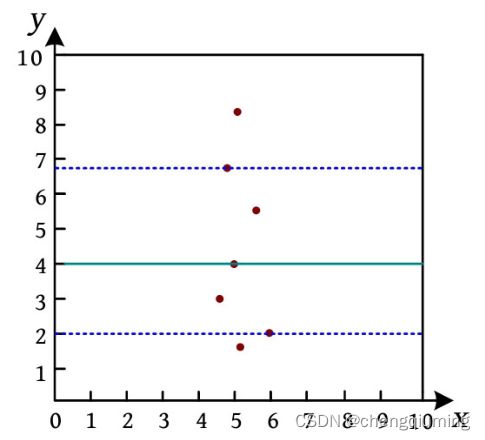
其中,x 为所有 xi 的平均数。方差用于反映数据的波动大小(即分散程度),方差越大,分散得越开,越容易划分。例如,二维数据如下图所示,数据在 x 维度方差较小,在 y 维度方差较大,按照 y 维度划分更好一些。
2 选择划分点
为了保障左右子树大致相等,可以将中位数作为划分点。
三 图解
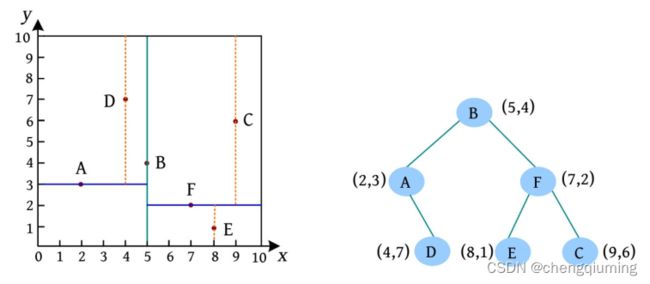
给定一个二维数据集:A(2,3)、B(5,4)、C(9,6)、D(4,7)、E(8,1)、F(7,2),构建一棵 KD 树。
以轮转法为例,构建过程如下。
1 第 1 层按照第 1 维 x 划分,6 个 点的 x 值分别为2、4、5、7、8、9,按中位数 5 一分为二,像切豆腐块一样,在 x=5 的位置竖着切一刀。将划分点 B(5, 4) 作为 KD 树的根,左侧两个点为 A、D,右侧三个点为 C、E、F。
2 第 2 层再按照第 2 维 y 划分,左侧两个点的 y 值分别为 3、7,A 作为左子树的树根;右侧三个点的 y 值分别为 1、2、6,按中位数 2 一分为二,将 F 作为右子树的树根。
3 就这样一直进行下去,直到左右两侧没有数据为止。
二维切分图和对应的 K D树如下图所示。
四 m 近邻搜索
在 KD 树中查询给定目标点 p 最近邻的 m 个点,首先从根节点出发,向下递归,若点 p 当前维的坐标小于树根,则在左子树中查询,否则在右子树中查询。在查询过程中用优先队列(最大堆)存储最近邻的 m 个点,当存在某一点 q 比优先队列中的最远点距离 p 更近时,优先队列堆顶出队,q 入队。
在以下两种情况下,需要继续在当前划分点的另一区域查询。
• 在优先队列中存储的最近邻点不足 m 个;
• 以 p 为球心且 p 到最近邻点(m 个最近邻点中的最远点)的距离为半径的超球体与划分点的另一个区域相交。
五 图解
假设有一棵 KD 树包含 6 个点 A(2, 3)、B(5, 4)、C(9, 6)、D(4,7)、E(8, 1)、F(7, 2),需要查询离 p(6, 6) 最近的两个点。

查询过程如下。
1 当前维度为 x ,p 的 x 坐标大于树根 B,在B的右子树中查询。
2 当前维度为 y ,p 的 y 坐标大于树根 F,在 F 的右子树中查询。
3 当前维度为 x ,p 的 x 坐标小于树根 C,在 C 的左子树中查询。
4 C 的左子树为空,优先队列元素个数小于2,C 入队。
5 C 的右子树为空,返回到 F,优先队列的元素个数小于2,F 入队,搜索 F 的左子树。
6 F的左子树 E 到 p 的距离比队列中的最远点大,无须入队。
7 返回到 B,B 到 p 的距离比队列中的最远点小,F 出队,B入队。
8 以 p 为球心 且 p 到队列中最远点的距离为半径的超球体与划分点 B 的另一区域有交集(d 9 在 B 的左子树中,D 到 p 的距离比队列中的最远点小,C 出队,D 入队。 10 距离 p 点最近的两个点为 D、B。 欧几里得距离又叫作欧氏距离,常用作两点之间的距离度量。点 p 和点 q 之间的欧氏距离是连接它们的直线段的长度。在笛卡尔坐标系中,若p =(p1 , p2 , …, pn )和q =(q1 , q2 , …, qn ) 是 N 维空间中的两点,则 p 、q 的欧氏距离为 这里只是求给定目标点 p 最近邻的 m 个点,因此不需要开方,只求平方和即可比较大小。