L形障碍物边框计算,车辆边框都为L形状。
LSshapeFilter() 初始化类,设置参数。
updateCpFromPoints(const std::vector
toRightAngleBBox(std::vector
updateDimentionAndEstimatedAngle(const std::vector
tf::Matrix3x3 obs_mat;
obs_mat.setEulerYPR(bb_yaw, 0, 0);
tf::Quaternion q_tf;
obs_mat.getRotation(q_tf);
object.pose.orientation.x = q_tf.getX();
object.pose.orientation.y = q_tf.getY();
object.pose.orientation.z = q_tf.getZ();
计算 object.pose.orientation.w = q_tf.getW();
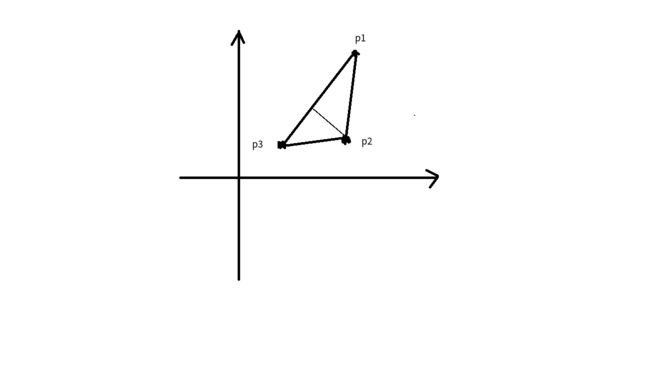
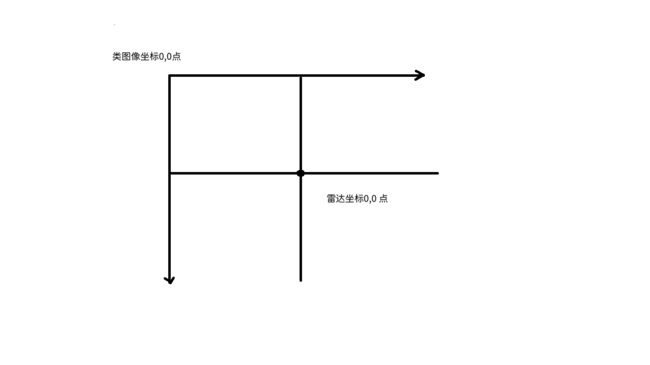
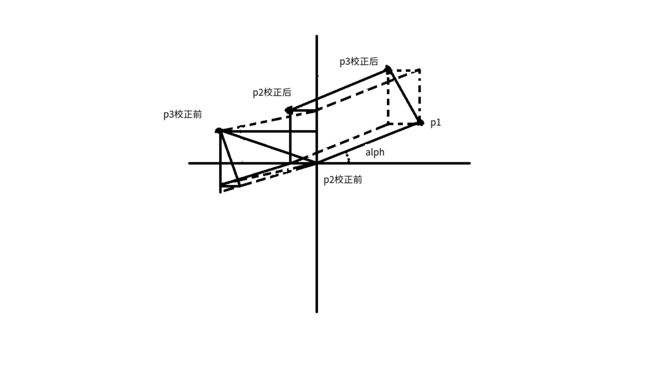
getLShapeBB(const autoware_msgs::DetectedObjectArray& in_object_array, autoware_msgs::DetectedObjectArray& out_object_array) 获得L形边框主函数。1. 轮询所有聚类出的目标。2. 将点云中第一个点作为参考点,计算整体坐标的偏移。坐标系为:长宽各120米,15点/米,坐标系与图像坐标系相同,左上角为原点。offset_init_pic_point代表当前目标所有点的偏移。3. 遍历输入点云中的每一个点。计算在2坐标系中的坐标,并加2中的偏移量。如果点的x或y坐标大于15×120或者小于0,则continue。4. 计算每个点的斜率,y/x,找出斜率最大和最小的两个点。5. 计算最大最小两点间的斜率和距离。6. 如果斜率和距离都大于某个阈值,则需要计算4个边框点。在点云中随机计算一定数量的点到5中找到的两点组成直线的距离,找出最大的点。这个点就是算法中的p2。p4用p1,p2,p3计算。7. 如果斜率和距离某一个小于阈值,则调用cv::minAreaRect计算包含所有点的最小四边形。8. 调用updateCpFromPoints() 利用4个边框点,重新计算目标的中心点。9. toRightAngleBBox() 如果p1p2,p2p3夹角大于阈值,则需要校正p2,p3两个点。也就是检查边框点是否需要更新。10. 用9更新后的边框点,计算目标的方向,存入到目标的位姿中。