蓝桥杯嵌入式STM32G431RBT6知识点(主观题部分)
目录
1 前置准备
1.1 Keil
1.1.1 编译器版本及微库
1.1.2 添加官方提供的LCD及I2C文件
1.2 CubeMX
1.2.1 时钟树
1.2.2 其他
1.2.3 明确CubeMX路径,放置芯片包
2 GPIO
2.1 实验1:LED1-LED8循环亮灭
编辑
2.2 实验2:按键控制LED亮灭(检测电平法)
2.3 实验3:按键控制LED亮灭(外部中断法)
2.4 实验4:蜂鸣器
2.5 实验5:按键消抖
2.6 实验6:长按短按
2.7 实验7:双击
2.8 实验8: 长按双击综合
3 ADC/DAC
3.1 实验1:获取电位器引脚的电压
3.2 实验2:设定双引脚电压并读取
4 I2C EEPROM
4.1 实验1:EEPROM的读写+浮点数的处理
4.2 实验2:大位数读取
4.3 实验3:EEPROM掉电不丢失
4.4 实验4:第一次上电问题
4.5 实验5:MCP4017可编程电阻
5 UART/USART
5.1 实验1:轮询收发
5.2 实验2:中断收发
5.3 实验3:中断回调函数
5.4 字符串问题注意
5.5 实验4:发送指定格式的字符串并从字符串中提取指定信息
5.6 实验5:DMA及几种收发方式的分析
5.7 实验6:串口的不定长收发(DMA+空闲中断)
6 TIM
6.1 实验1:延时
6.2 实验2:PWM输出(控制蜂鸣器)
6.3 实验3:检测555信号发生器信号频率和占空比
6.4 实验4:检测自己输出的PWM频率和占空比(上升沿中断)
6.5 实验5:检测自己输出的PWM频率和占空比(PWM中断)
7 RTC
7.1 实验1:显示年月日时分秒
7.2 实验2:秒中断
7.3 实验3:闹钟中断
1 前置准备
1.1 Keil
1.1.1 编译器版本及微库
编译器版本调整至version 5,勾选Micro LIB

1.1.2 添加官方提供的LCD及I2C文件
这五个文件是需要添加进自己的工程中的

这个是官方比赛提供的数据包,有关I2C的文件从2中提取,有关LCD的文件从5中提取(.c文件在Src中,.h文件在Inc中)

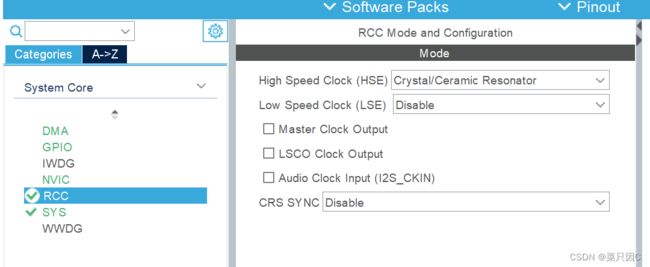
1.2 CubeMX
1.2.1 时钟树

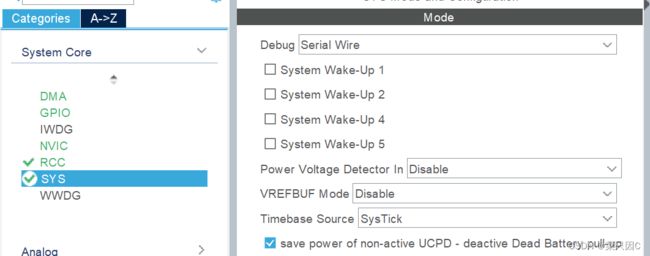
1.2.2 其他


1.2.3 明确CubeMX路径,放置芯片包
2 GPIO
2.1 实验1:LED1-LED8循环亮灭
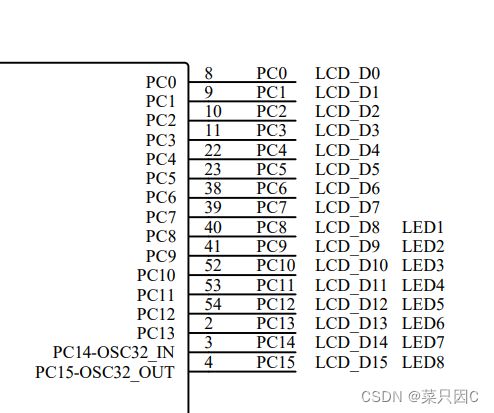
在最小系统原理图中找到LED1-LED8对应的引脚是PC8-PC15,那么我们在CubeMX中将这几个引脚配置成GPIO_Output即可
while内的代码:
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_SET);//常用函数1
HAL_Delay(100);//常用函数2
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,GPIO_PIN_SET);
HAL_Delay(100);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_10,GPIO_PIN_SET);
HAL_Delay(100);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_10,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_11,GPIO_PIN_SET);
HAL_Delay(100);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_11,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_12,GPIO_PIN_SET);
HAL_Delay(100);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_12,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
HAL_Delay(100);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_SET);
HAL_Delay(100);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_15,GPIO_PIN_SET);
HAL_Delay(100);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_15,GPIO_PIN_RESET);2.2 实验2:按键控制LED亮灭(检测电平法)

参考按键的引脚,同时别忘了把按键对应的引脚调整为上拉输入(起始高电平)
while内代码:
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)==GPIO_PIN_RESET)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_SET);
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_RESET);
}2.3 实验3:按键控制LED亮灭(外部中断法)
找到按键对应引脚:

打开外部中断:
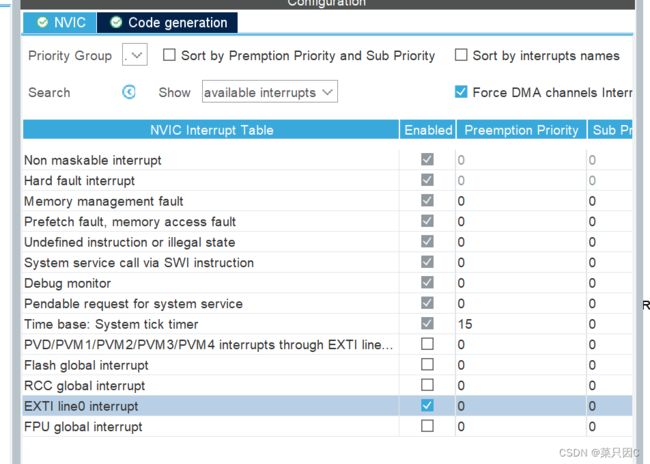
/* USER CODE BEGIN PFP */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_PIN)
{
if(GPIO_PIN==GPIO_PIN_0)
{
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_8);
}
}
/* USER CODE END PFP */2.4 实验4:蜂鸣器
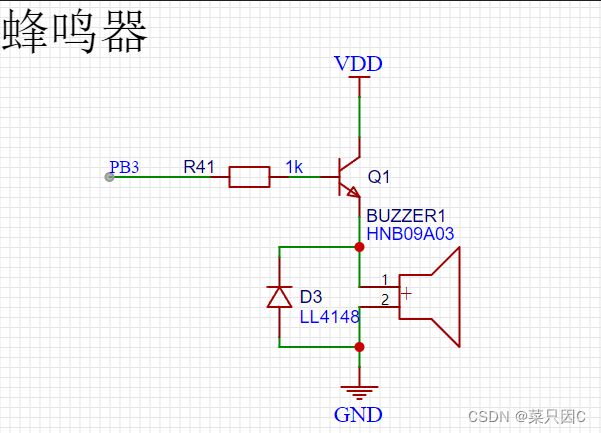
当PB3为高电平时,二极管断开,所以蜂鸣器路通; 当PB3为低电平时,二极管导通,所以蜂鸣器路短路
只要配置好PB3的GPIO,就能轻松使用,这里不再用代码解释
2.5 实验5:按键消抖
按键按下和放下的过程中会出现抖动,进而出现高低电平的交替,我们通过扫描两次按键的情况来具体判断情况
1.如果第一次扫描为高电平,那么按键没有被按下
2.如果第一次扫描为低电平,第二次扫描为高电平,那么认为是抖动,不计入成功按键
3.如果两次扫描均为低电平,成功按键
两次扫描的间隔用定时器中断来做
芯片信号频率为80MHz,分频系数设置为8000-1,计数器溢出值设置为100-1,那么定时器溢出时间为10ms

/* USER CODE BEGIN PTD */
char buf[20];
struct keys{
int step;
int state;
}key[4];
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM1)
{
key[0].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].state=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(int i=0;i<4;i++)
{
switch(key[i].step)
{
case 0:
{
if(key[i].state==GPIO_PIN_RESET)
{
key[i].step=1;
}
}
break;
case 1:
{
if(key[i].state==GPIO_PIN_RESET)
{
key[i].step=2;
sprintf(buf,"%d",i);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
}
else
{
key[i].step=0;
}
}
break;
case 2:
{
if(key[i].state==GPIO_PIN_SET)
{
key[i].step=0;
}
}
break;
}
}
}
}
/* USER CODE END PFP */
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
I2CInit();
HAL_TIM_Base_Start_IT(&htim1);
/* USER CODE END 2 */2.6 实验6:长按短按
1.如果第一次扫描为高电平,则没有按键
2.如果第一次扫描为低电平,第二次扫描为高电平,那么认为是抖动,不计入成功按键
3.如果两次扫描均为低电平,成功按键,如果按键时间大于700ms,则视为长按,若小于700ms,则视为短按
/* USER CODE BEGIN PTD */
char buf[20];
struct keys{
int step;
int state;
}key[4];
int a=-1;
int cnt;
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM1)
{
key[0].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].state=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(int i=0;i<4;i++)
{
switch(key[i].step)
{
case 0:
{
if(key[i].state==GPIO_PIN_RESET)
{
key[i].step=1;
cnt=0;
}
}
break;
case 1:
{
if(key[i].state==GPIO_PIN_RESET)
{
key[i].step=2;
sprintf(buf,"SINGLE");
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
}
else
{
key[i].step=0;
}
}
break;
case 2:
{
if(key[i].state==GPIO_PIN_RESET)
{
if(i==a&&cnt>70)
{
sprintf(buf,"%d %d",i,cnt);
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
}
else
{
a=i;
}
cnt++;
}
else
{
key[i].step=0;
}
}
break;
}
}
}
}
/* USER CODE END PFP */2.7 实验7:双击
1.如果第一次能够被视为成功按键,那么计时开始
2.如果两次成功按键的间隔小于700ms,视为双击成功
/* USER CODE BEGIN PTD */
char buf[20];
struct keys{
int step;
int state;
int cnt;
}key[4];
int a=-1;
int cnt;
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM1)
{
key[0].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].state=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(int i=0;i<4;i++)
{
switch(key[i].step)
{
case 0:
{
if(key[i].state==GPIO_PIN_RESET)
{
key[i].step=1;
}
}
break;
case 1:
{
if(key[i].state==GPIO_PIN_RESET)
{
sprintf(buf,"SINGLE");
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
if(i==a)
{
if(key[i].cnt<70)
{
sprintf(buf,"%d %d",i,key[i].cnt);
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
key[i].step=0;
a=-1;
}
key[0].cnt=0;
key[1].cnt=0;
key[2].cnt=0;
key[3].cnt=0;
}
else
{
a=i;
}
key[i].step=2;
}
else
{
key[i].step=0;
}
}
break;
case 2:
{
if(key[i].state==GPIO_PIN_SET)
{
key[i].step=0;
}
}
break;
}
}
key[a].cnt++;
}
}
/* USER CODE END PFP */
2.8 实验8: 长按双击综合
其实不用写在一个定时器内,那样逻辑会比较复杂。我们可以开两个定时器,一个定时器检测长按,一个定时器检测双击
/* USER CODE BEGIN PTD */
char buf[20];
struct keys{
int state;
int step1;
int step2;
int double_time;
}key[4];
int a=-1,b=-1;
int cnt;
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM3)
{
key[0].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].state=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(int i=0;i<4;i++)
{
switch(key[i].step2)
{
case 0:
{
if(key[i].state==GPIO_PIN_RESET)
{
key[i].step2=1;
cnt=0;
}
}
break;
case 1:
{
if(key[i].state==GPIO_PIN_RESET)
{
key[i].step2=2;
/*sprintf(buf,"SINGLE");
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);*/
}
else
{
key[i].step2=0;
}
}
break;
case 2:
{
if(key[i].state==GPIO_PIN_RESET)
{
if(i==b&&cnt>70)
{
sprintf(buf,"LONG:%d %d",i,cnt);
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
}
else
{
b=i;
}
cnt++;
}
else
{
key[i].step2=0;
}
}
break;
}
}
}
if(htim->Instance==TIM1)
{
key[0].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].state=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(int i=0;i<4;i++)
{
switch(key[i].step1)
{
case 0:
{
if(key[i].state==GPIO_PIN_RESET)
{
key[i].step1=1;
}
}
break;
case 1:
{
if(key[i].state==GPIO_PIN_RESET)
{
sprintf(buf,"SINGLE");
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
if(i==a)
{
if(key[i].double_time<70)
{
sprintf(buf,"DOUBLE:%d %d",i,key[i].double_time);
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
key[i].step1=0;
a=-1;
}
key[0].double_time=0;
key[1].double_time=0;
key[2].double_time=0;
key[3].double_time=0;
}
else
{
a=i;
}
key[i].step1=2;
}
else
{
key[i].step1=0;
}
}
break;
case 2:
{
if(key[i].state==GPIO_PIN_SET)
{
key[i].step1=0;
}
}
break;
}
}
key[a].double_time++;
}
}
/* USER CODE END PFP */
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Blue);
HAL_TIM_Base_Start_IT(&htim1);
HAL_TIM_Base_Start_IT(&htim3);
/* USER CODE END 2 */
3 ADC/DAC
3.1 实验1:获取电位器引脚的电压
我们想获取两个电位器的电压:
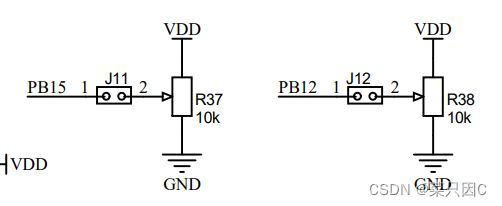
这里以PB12为例:

/* USER CODE BEGIN PTD */
char buf[20];
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
double getADC()
{
HAL_ADC_Start(&hadc1);
return HAL_ADC_GetValue(&hadc1)*3.3/4096;
}
/* USER CODE END PFP */
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
/* USER CODE END 2 */
/* USER CODE BEGIN 3 */
sprintf(buf,"%.3lf",getADC());
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
HAL_Delay(1000);
}
/* USER CODE END 3 */转动电位器R38可观察到电压发生明显变化
3.2 实验2:设定双引脚电压并读取

这里我们发现测量ADC的两个引脚均在ADC1上,所以获取电压会有先后之分
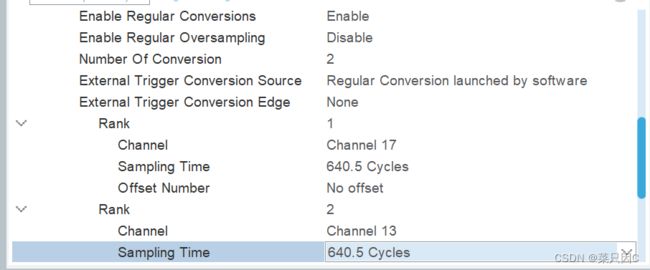 采样时间调长,采样准确些,这里我们看到优先采集PA4,再采集PA3
采样时间调长,采样准确些,这里我们看到优先采集PA4,再采集PA3
/* USER CODE BEGIN PFP */
void setDAC()
{
HAL_DAC_Start(&hdac1,DAC_CHANNEL_1);
HAL_DAC_Start(&hdac1,DAC_CHANNEL_2);
HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_1,0,1.1*4096/3.3);
HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_2,0,2.2*4096/3.3);
}
double getADC()
{
HAL_ADC_Start(&hadc2);
return HAL_ADC_GetValue(&hadc2)*3.3/4096;
}
/* USER CODE END PFP */
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
setDAC();
/* USER CODE END 2 */
/* USER CODE BEGIN 3 */
sprintf(buf,"%.3lf",getADC());
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
HAL_Delay(1);//需要延时
sprintf(buf,"%.3lf",getADC());
LCD_ClearLine(Line5);
LCD_DisplayStringLine(Line5,(uint8_t*)buf);
HAL_Delay(1000);
}
/* USER CODE END 3 */4 I2C EEPROM
4.1 实验1:EEPROM的读写+浮点数的处理
对于EEPROM读写的函数我们有固定模板:
uint8_t EEPROM_Read(uint8_t addr)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
uint8_t temp=I2CReceiveByte();
I2CWaitAck();
I2CStop();
return temp;
}
void EEPROM_Write(uint8_t addr,uint8_t info)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CSendByte(info);
I2CWaitAck();
I2CStop();
}借用3.2的实验数据进行读写,建议EEPROM不要写在while内,EEPROM的读写是有寿命的,每次读写都要延时一下:
/* USER CODE BEGIN PTD */
char buf[20];
double V1[5],V2[5];
uint8_t addr,res1,res2,res3,res4;
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
void setDAC()
{
HAL_DAC_Start(&hdac1,DAC_CHANNEL_1);
HAL_DAC_Start(&hdac1,DAC_CHANNEL_2);
HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_1,0,1.1*4096/3.3);
HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_2,0,2.2*4096/3.3);
}
double getADC()
{
HAL_ADC_Start(&hadc2);
return HAL_ADC_GetValue(&hadc2)*3.3/4096;
}
uint8_t EEPROM_Read(uint8_t addr)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
uint8_t temp=I2CReceiveByte();
I2CWaitAck();
I2CStop();
return temp;
}
void EEPROM_Write(uint8_t addr,uint8_t info)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CSendByte(info);
I2CWaitAck();
I2CStop();
}
/* USER CODE END PFP *//* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
I2CInit();
setDAC();
HAL_Delay(1);
for(int i=0;i<5;i++)
{
V1[i]=getADC();
HAL_Delay(1);
V2[i]=getADC();
HAL_Delay(1);
}
for(int i=0;i<5;i++)
{
EEPROM_Write(addr++,(uint8_t)V1[i]);
HAL_Delay(50);
EEPROM_Write(addr++,(V1[i]-(uint8_t)V1[i])*100);
HAL_Delay(50);
EEPROM_Write(addr++,(uint8_t)V2[i]);
HAL_Delay(50);
EEPROM_Write(addr++,(V2[i]-(uint8_t)V2[i])*100);
HAL_Delay(50);
}
addr=0;
for(int i=0;i<5;i++)
{
res1=EEPROM_Read(addr++);
HAL_Delay(50);
res2=EEPROM_Read(addr++);
HAL_Delay(50);
res3=EEPROM_Read(addr++);
HAL_Delay(50);
res4=EEPROM_Read(addr++);
HAL_Delay(50);
sprintf(buf,"%.2lf %.2lf",res1+(double)res2/100,res3+(double)res4/100);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
}
/* USER CODE END 2 */4.2 实验2:大位数读取
8位范围:0-255
16位范围:0-65535
24位范围:0-16777215
32位范围:0-4294967296
这里以到24位为例
/* USER CODE BEGIN PTD */
char buf[20];
int num[10]={105798,367842,56674,4,256,8917,56565,34343,1025,788};
uint8_t temp1,temp2,temp3,res1,res2,res3;
uint8_t addr;
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
uint8_t EEPROM_Read(uint8_t addr)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
uint8_t temp=I2CReceiveByte();
I2CWaitAck();
I2CStop();
return temp;
}
void EEPROM_Write(uint8_t addr,uint8_t info)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CSendByte(info);
I2CWaitAck();
I2CStop();
}
/* USER CODE END PFP */
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
I2CInit();
for(int i=0;i<10;i++)
{
temp1=num[i]&0xFF;
temp2=((num[i]-temp1)>>8)&0xFF;
temp3=((num[i]-temp1-(temp2<<8))>>16)&0xFF;
EEPROM_Write(addr++,temp1);
HAL_Delay(50);
EEPROM_Write(addr++,temp2);
HAL_Delay(50);
EEPROM_Write(addr++,temp3);
HAL_Delay(50);
}
addr=0;
for(int i=0;i<10;i++)
{
res1=EEPROM_Read(addr++);
HAL_Delay(50);
res2=EEPROM_Read(addr++);
HAL_Delay(50);
res3=EEPROM_Read(addr++);
HAL_Delay(50);
sprintf(buf,"%d",res1+(res2<<8)+(res3<<16));
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
HAL_Delay(1000);
}
/* USER CODE END 2 */
4.3 实验3:EEPROM掉电不丢失
去掉上面程序的写的部分,重新烧录即可验证
4.4 实验4:第一次上电问题
我们以这道题为例:如果我们将程序烧录到新板时,EEPROM的值是不确定的,而题目要求初次上电就要能读取相关值。所以我们需要判断板子是否是第一次上电,然后做出相关步骤

if(EEPROM_Read(0xaa)!=1&&EEPROM_Read(0xab)!=1)
{
EEPROM_Write(0xaa,1);//我们设定0xaa为是否是第一次上电(新板)的标志位1
HAL_Delay(20);
EEPROM_Write(0xab,1);//我们设定0xab为是否是第一次上电(新板)的标志位2
HAL_Delay(20);
EEPROM_Write(0xa0,30);
HAL_Delay(20);
EEPROM_Write(0xa1,50);
HAL_Delay(20);
EEPROM_Write(0xa2,70);
HAL_Delay(20);
}4.5 实验5:MCP4017可编程电阻
原理:


Rs为单个电阻阻值;RWS为总阻值,与R17串联,两者对VDD电压进行分压,可以通过测量PB14的电压判断可编程电阻的阻值。
MCP4017的默认总阻值为100kΩ ,对应0-127个档位,当寄存器为0时,阻值为0;当寄存器为0x7F时阻值为100kΩ
![]()
![]()
模板:
void RWrite(uint8_t value)
{
I2CStart();
I2CSendByte(0x5e);
I2CWaitAck();
I2CSendByte(value);
I2CWaitAck();
I2CStop();
}
uint8_t RRead(void)
{
uint8_t value;
I2CStart();
I2CSendByte(0x5F);
I2CWaitAck();
value = I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return value;
}检测从0-127,PB14的电压
/* USER CODE BEGIN PFP */
void RWrite(uint8_t value)
{
I2CStart();
I2CSendByte(0x5e);
I2CWaitAck();
I2CSendByte(value);
I2CWaitAck();
I2CStop();
}
uint8_t RRead(void)
{
uint8_t value;
I2CStart();
I2CSendByte(0x5F);
I2CWaitAck();
value = I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return value;
}
double getADC()
{
HAL_ADC_Start(&hadc1);
return HAL_ADC_GetValue(&hadc1)*3.3/4096;
}
/* USER CODE END PFP */
/* USER CODE BEGIN WHILE */
for(int i=0;i<128;i++)
{
RWrite(i);
HAL_Delay(20);
sprintf(buf,"%d %lf",RRead(),getADC());
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
HAL_Delay(1000);
}
while (1)
{
/* USER CODE END WHILE */5 UART/USART

CubeMX默认的引脚是不对的,所以别忘了更改引脚
5.1 实验1:轮询收发
HAL_UART_Receive:接收不完指定数量的字符不会进行下一步,设置的等待时间一般为无限大
/* USER CODE BEGIN WHILE */
HAL_UART_Receive(&huart1,(uint8_t*)buf,5,0xFFFF);//接收不完指定数量的字符不会进行下一步
HAL_UART_Transmit(&huart1,(uint8_t*)buf,5,0xFFFF);
while (1)
{
/* USER CODE END WHILE */
5.2 实验2:中断收发
CubeMX别忘打开串口中断
HAL_UART_Receive_IT:不会等待,最多收指定个数,收几个无所谓,但是只有收满了才会进入中断回调函数
下面这个程序如果不写在while里是不会收到除了空白以外的任何字符的,因为只执行一次的话Receive函数已经过了,不会再执行
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_UART_Receive_IT(&huart1,(uint8_t*)buf,5);//不会等待,最多收5个,收几个无所谓
HAL_UART_Transmit_IT(&huart1,(uint8_t*)buf,5);
}
/* USER CODE END 3 */5.3 实验3:中断回调函数
/* USER CODE BEGIN PFP */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance==USART1)
{
HAL_UART_Transmit_IT(&huart1,(uint8_t*)buf,5);
HAL_UART_Receive_IT(&huart1,(uint8_t*)buf,5);
}
}
/* USER CODE END PFP */
/* USER CODE BEGIN WHILE */
HAL_UART_Receive_IT(&huart1,(uint8_t*)buf,5);//不会等待,最多收5个,收几个无所谓
while (1)
{
/* USER CODE END WHILE */5.4 字符串问题注意
每个字符串结尾都有\r\n占两个位置,而且如果我们在串口助手里勾选发送新行后,每次发送的字符串后都带\r\n
5.5 实验4:发送指定格式的字符串并从字符串中提取指定信息
比如我们想发送时间,指定格式为时:分:秒,我们想从串口收到的字符串中提取到时,分,秒三个信息
这里用到sscanf函数来提取信息
当然也可以根据实际情况单个单个提取,不过会略显复杂
/* USER CODE BEGIN PTD */
char buf[20];
int hour,min,second;
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance==USART1)
{
sscanf(buf,"%d:%d:%d",&hour,&min,&second);
sprintf(buf,"hour:%d",hour);
LCD_ClearLine(Line2);
LCD_ClearLine(Line4);
LCD_ClearLine(Line6);
LCD_DisplayStringLine(Line2,(uint8_t*)buf);
sprintf(buf,"min:%d",min);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
sprintf(buf,"second:%d",second);
LCD_DisplayStringLine(Line6,(uint8_t*)buf);
memset(buf,0,sizeof(buf));
HAL_UART_Receive_IT(&huart1,(uint8_t*)buf,8);
}
}
/* USER CODE END PFP */
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
I2CInit();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
HAL_UART_Receive_IT(&huart1,(uint8_t*)buf,8);
while (1)
{
/* USER CODE END WHILE */5.6 实验5:DMA及几种收发方式的分析
打开DMA:

打开中断:
DMA是默认打开中断的
因为DMA是不占用CPU的,我们可以尽量使用DMA来提高效率
这里我们发现收到的数据不完整,然后我们延时一下,这次数据完整
/* USER CODE BEGIN PTD */
char buf[20];
int hour,min,second;
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance==USART1)
{
sscanf(buf,"%d:%d:%d",&hour,&min,&second);
sprintf(buf,"hour:%d",hour);
LCD_ClearLine(Line2);
LCD_ClearLine(Line4);
LCD_ClearLine(Line6);
LCD_DisplayStringLine(Line2,(uint8_t*)buf);
sprintf(buf,"min:%d",min);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
sprintf(buf,"second:%d",second);
LCD_DisplayStringLine(Line6,(uint8_t*)buf);
sprintf(buf,"%02d:%02d:%02d",hour,min,second);
HAL_UART_Transmit_DMA(&huart1,(uint8_t*)buf,8);
//int t=100000; while(t--);
LCD_DisplayStringLine(Line8,(uint8_t*)buf);
memset(buf,0,sizeof(buf));
HAL_UART_Receive_DMA(&huart1,(uint8_t*)buf,8);
}
}
/* USER CODE END PFP */
/* USER CODE BEGIN WHILE */
HAL_UART_Receive_DMA(&huart1,(uint8_t*)buf,8);
while (1)
{
/* USER CODE END WHILE */
然后我们试图将Transmit一句改成IT,然后将USART1的中断优先级调整比DMA高,然后发现仍然可以接收到
但是如果我们全部改成IT,就不可取了,初步分析是中断回调函数的事件过多
所以我们尽量采取DMA的方式收发数据
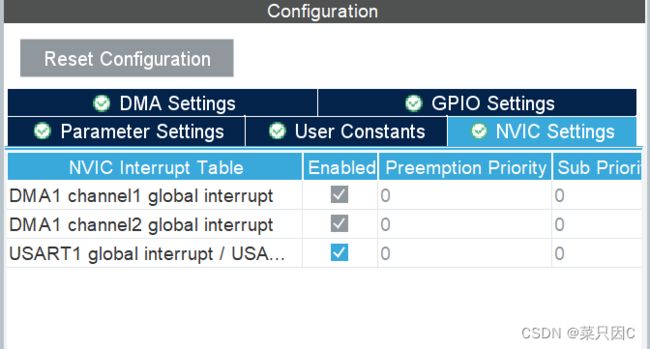
5.7 实验6:串口的不定长收发(DMA+空闲中断)
其中中断服务函数需要到
![]()
中找
/* USER CODE BEGIN WHILE */
HAL_UART_Receive_DMA(&huart1,(uint8_t*)buf,20);
__HAL_UART_ENABLE_IT(&huart1,UART_IT_IDLE);
while (1)
{
/* USER CODE END WHILE */
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_IDLE)==SET)
{
__HAL_UART_CLEAR_IDLEFLAG(&huart1);
HAL_UART_DMAStop(&huart1);
len=20-__HAL_DMA_GET_COUNTER(huart1.hdmarx);
HAL_UART_Transmit_DMA(&huart1,(uint8_t*)buf,len);
HAL_UART_Receive_DMA(&huart1,(uint8_t*)buf,20);
}
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
/* USER CODE END USART1_IRQn 1 */
}6 TIM
6.1 实验1:延时

while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(__HAL_TIM_GetCounter(&htim1)==10000)
{
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_8);
__HAL_TIM_SetCounter(&htim1,0);
}
}
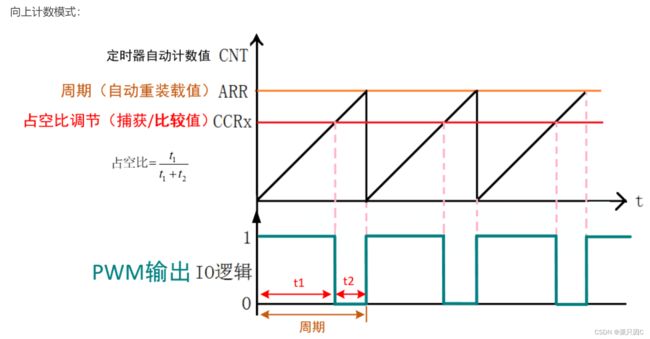
/* USER CODE END 3 */6.2 实验2:PWM输出(控制蜂鸣器)
PWM原理如图所示:
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
I2CInit();
LED_Close();
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,5000);
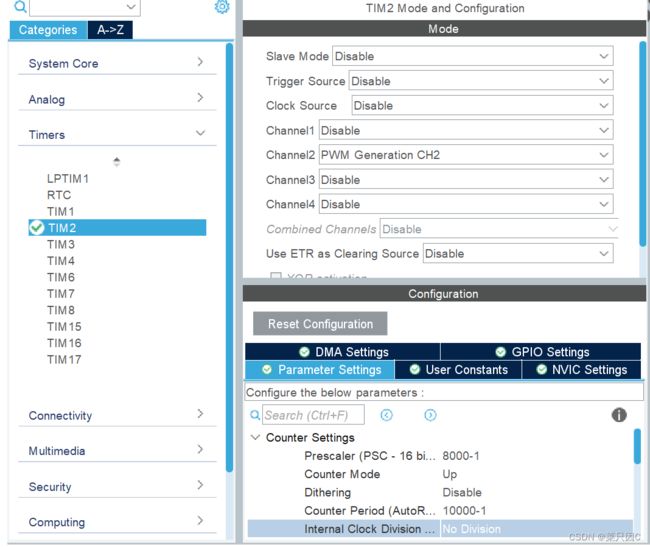
/* USER CODE END 2 */6.3 实验3:检测555信号发生器信号频率和占空比
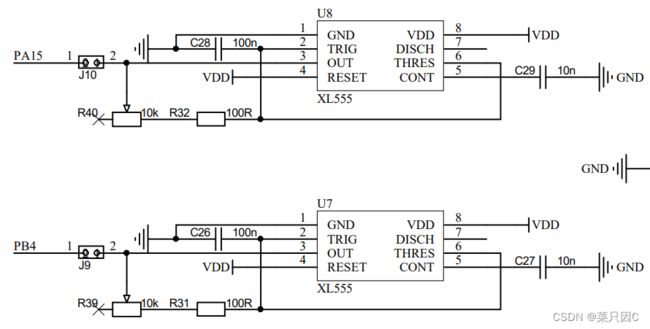
分析:每次捕捉到上升沿我们就进入一次中断,这时我们就得到了一个信号周期的大小
现在我们已知定时器计一个数的时间,只要我们读取定时器计了多少数,就能通过公式:
信号周期=定时器计一个数的时间*定时器计数值
算出信号周期,进而算出信号频率
占空比的计算可以另外设置一个通道,根据占空比的定义:
占空比=一个周期内高电平的时间/一个周期
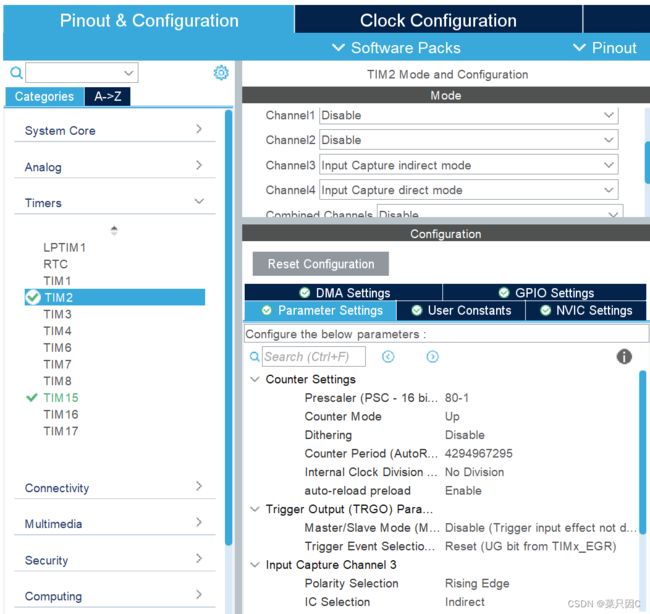
测量PA15引脚对应的555信号发生器:
注意:分频系数设置为80比较好,这样记一次数的时间比较短,测量比较精确,而且计数器不容易溢出

注意TIM2CHANNEL1对应的引脚设置成PA15
这里注意打印%的方法
/* USER CODE BEGIN PFP */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM2&&htim->Channel==HAL_TIM_ACTIVE_CHANNEL_1)
{
cnt=HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);
cnt_down=HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_2);
__HAL_TIM_SetCounter(&htim2,0);
f=10000000/cnt;
duty=1-(double)cnt_down/(double)cnt;
}
}
/* USER CODE END PFP */
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
I2CInit();
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);
/* USER CODE END 2 */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
sprintf(buf,"%dHz %.2lf%%",f,duty*100);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
HAL_Delay(1000);
LCD_ClearLine(Line4);
}
/* USER CODE END 3 */6.4 实验4:检测自己输出的PWM频率和占空比(上升沿中断)
找到板子上能插杜邦线的两个引脚,一个引脚输出PWM,另一个引脚测量输入的PWM有关性质
我选择了PB15和PB11两个引脚,PB15用来产生PWM波,PB11用来测量PWM的有关性质

PB15:
设置分频系数为8,计数器最大值为1000-1,所以PWM的频率为:
80MHz/8/1000=10000Hz

PB11:
分频系数为80-1,所以计数频率(1/计一个数的时间)为:
80MHz/80=1MHz
set可以设置为在0-1000内的值,假如我们设置为300,那么占空比为30%
/* USER CODE BEGIN PTD */
int cnt,cnt_down,f;
double duty;
char buf[20];
int set;
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM2&&htim->Channel==HAL_TIM_ACTIVE_CHANNEL_4)
{
cnt=HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_4);
cnt_down=HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_3);
__HAL_TIM_SetCounter(&htim2,0);
f=1000000/cnt;
duty=1-(double)cnt_down/(double)cnt;
}
}
/* USER CODE END PFP */
/* USER CODE BEGIN 2 */
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_4);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim15,TIM_CHANNEL_2);
__HAL_TIM_SetCompare(&htim15,TIM_CHANNEL_2,set);
LCD_Init();
LCD_Clear(Blue);
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
sprintf(buf,"%dHz %.4lf",f,duty);
LCD_DisplayStringLine(Line2,(uint8_t*)buf);
HAL_Delay(200);
}
/* USER CODE END 3 */最后测量得到频率为10204Hz,占空比为0.5102,和预估结果大致相同
6.5 实验5:检测自己输出的PWM频率和占空比(PWM中断)
捕捉到上升沿中断其实跟PWM中断一样,都是上升沿开始时触发中断
我们打开PWM中断,使用PWM中断回调函数
/* USER CODE BEGIN PTD */
int cnt,cnt_down,f;
double duty;
char buf[20];
int set;
/* USER CODE END PTD */
/* USER CODE BEGIN PFP */
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM15&&htim->Channel==HAL_TIM_ACTIVE_CHANNEL_2)
{
cnt=HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_4);
cnt_down=HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_3);
__HAL_TIM_SetCounter(&htim2,0);
f=1000000/cnt;
duty=1-(double)cnt_down/(double)cnt;
}
}
/* USER CODE END PFP */
/* USER CODE BEGIN 2 */
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_4);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_3);
HAL_TIM_PWM_Start_IT(&htim15,TIM_CHANNEL_2);
__HAL_TIM_SetCompare(&htim15,TIM_CHANNEL_2,set);
LCD_Init();
LCD_Clear(Blue);
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
sprintf(buf,"%dHz %.4lf",f,duty);
LCD_DisplayStringLine(Line2,(uint8_t*)buf);
HAL_Delay(200);
}
/* USER CODE END 3 */7 RTC
7.1 实验1:显示年月日时分秒


/* USER CODE BEGIN PTD */
char buf[20];
/* USER CODE END PTD */
/* USER CODE BEGIN PD */
RTC_TimeTypeDef TIME;
RTC_DateTypeDef DATE;
/* USER CODE END PD */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_RTC_GetTime(&hrtc,&TIME,RTC_FORMAT_BIN);
HAL_RTC_GetDate(&hrtc,&DATE,RTC_FORMAT_BIN);
LCD_ClearLine(Line2);
LCD_ClearLine(Line4);
sprintf(buf,"%d-%d-%d",DATE.Year,DATE.Month,DATE.Date);
LCD_DisplayStringLine(Line2,(uint8_t*)buf);
sprintf(buf,"%d:%d:%d",TIME.Hours,TIME.Minutes,TIME.Seconds);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
}
/* USER CODE END 3 */7.2 实验2:秒中断
上面我们已经设置好RTC的频率为750MHz,按照如上系数配置,750K/125/6000=1Hz
1秒发生一次中断,而跟我们设定的闹钟时间无关
/* USER CODE BEGIN PTD */
char buf[20];
/* USER CODE END PTD */
/* USER CODE BEGIN PD */
RTC_TimeTypeDef TIME;
RTC_DateTypeDef DATE;
/* USER CODE END PD */
/* USER CODE BEGIN PFP */
void HAL_RTC_AlarmAEventCallback(RTC_HandleTypeDef *hrtc)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_3);
}
/* USER CODE END PFP */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_RTC_GetTime(&hrtc,&TIME,RTC_FORMAT_BIN);
HAL_RTC_GetDate(&hrtc,&DATE,RTC_FORMAT_BIN);
LCD_ClearLine(Line2);
LCD_ClearLine(Line4);
sprintf(buf,"%d-%d-%d",DATE.Year,DATE.Month,DATE.Date);
LCD_DisplayStringLine(Line2,(uint8_t*)buf);
sprintf(buf,"%d:%d:%d",TIME.Hours,TIME.Minutes,TIME.Seconds);
LCD_DisplayStringLine(Line4,(uint8_t*)buf);
}
/* USER CODE END 3 */
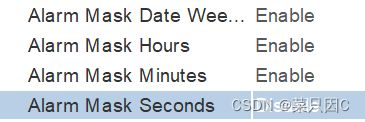
7.3 实验3:闹钟中断
日期时分都不看,只看秒,如果闹钟设定的秒跟当前时间一样,则进入中断,自己需要编写的其它代码跟实验2一致