毕业设计 STM32智能家政机器人
文章目录
- 0 前言
- 1 主要功能
- 2 硬件设计(原理图)
- 3 核心软件设计
- 4 实现效果
- 5 最后
0 前言
这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
毕业设计 STM32智能家政机器人(源码+硬件+论文)
学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
项目分享:
https://gitee.com/sinonfin/sharing

1 主要功能
本设计一种基于Android平台实现语音识别和命令生成,通过蓝牙无线传输至下位机,由下位机中的STM32F103控制器控制机器人完成用户指令。
研究内容:
随着微处理器技术的发展与成熟,嵌入式语音识别系统已逐渐成为各领域研究的热点方向,各种迎合人们需求的语音识别设备出现在我们的现实生活中。本课题重要研究的是通过语音识别技术控制机器人,该系统通过设备命令者的语言对机器人发出控制指令,让机器人为我们服务。考虑的语音识别需要很大的运算量,这对于微处理器的速度就有了一定的要求,所以在本系统中,我们采用了谷歌公司的Google Voice Search语音处理引擎,通过使用该引擎完成语音识别。同时,我们采用上位机识别并发送控制指令,下位机控制机器人的方式,中间传输环节通过HC-05蓝牙模块实现。在下位机中,我们采用STM32RBT6控制器通过串行方式控制机器人上的舵机,从而实现对机器人整体的控制。
实现功能:
- (1)家政服务机器人要求为移动车体,具有机械手;
- (2)基于“安卓”实现简单语音识别;
- (3)实现机械手臂简单操作;
- (4)通过蓝牙实现“安卓”对机器人的无线控制;
- (5)实现自动定位。
2 硬件设计(原理图)

3 核心软件设计
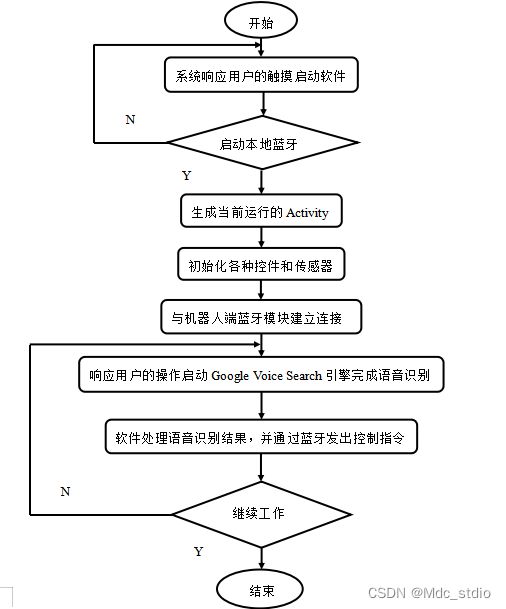
安卓端软件的工作流程
做为自动化专业的学生我在学习如何使用安卓方面遇到了很多原理上的困惑。因为自动化平时遇到的代码主要是运行在MCU、DSP和FPGA等处理器上,而本系统中安卓端软件为运行在操作系统中的软件,这就需要我从操作系统的层面来考虑软件的内部架构,以使得软件能够在启动操作系统后所剩无多的资源下高效的运行。
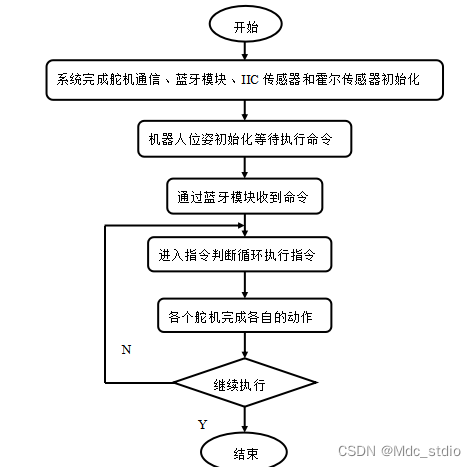
机器人端程序
机器人端程序主要实现通过HC-05蓝牙模块接收用户的指令,然后控制机器人完成相应的动作。在程序运行过程中还要涉及到各个模块和传感器的初始化,以及各个模块与控制器的实时通信。
篇幅有限,不过多复述详细设计细节,详细的设计分享在论文中。。。
关键代码
机器人端代码:
#include "sys.h"
#include "usart.h"
#include "usart2.h"
#include "delay.h"
#include "led.h"
#include "key.h"
#include "exti.h"
#include "wdg.h"
#include "timer.h"
#include "lcd.h"
#include "hc05.h"
#include "string.h"
#include "cds5500.h"
char tt;
void delay_s(u8 t)
{
u8 tt;
for(tt=0;tt<t;tt++)
{
delay_ms(1000);
}
}
int main(void)
{
u8 reclen=0;
unsigned short int distance=520;
unsigned short int height=750;
Stm32_Clock_Init(9);
delay_init(72);
uart_init(72,1000000);
LED_Init();
SetMode(1,0,0);delay_ms(30);
SetMode(2,0,0);delay_ms(30);
SetMode(3,0,0);delay_ms(30);
SetMode(4,0,0);delay_ms(30);
SetMode(5,0,1023);delay_ms(30);
SetMode(6,0,1023);delay_ms(30);
SetMode(7,0,1023);delay_ms(30);
SetMode(8,0,1023);delay_ms(30);
SetMode(9,0,1023);delay_ms(30);
HC05_Init();
delay_ms(1000);
PostureInit();
while(1)
{
if(USART2_RX_STA&0X8000)
{ reclen=USART2_RX_STA&0X7FFF;
USART2_RX_BUF[reclen]=0;
USART2_RX_STA=0;
if(tt=='1')
{
Forward();
}
if(tt=='3')
{
Back();
}
if(tt=='0')
{
LED0=1;LED1=1;
Stop();
}
if(tt=='4')
{
TurnRight();
}
if(tt=='2')
{
TurnLeft();
}
if(tt=='5')
{
SetMode(9,0,1023);
delay_ms(30);
OpenPaw();
LED0=0;
}
if(tt=='6')
{
SetMode(9,0,1023);
delay_ms(30);
ClosePaw();
}
while(tt=='8')
{
USART2_RX_STA=0;
distance-=10; if(distance<=200)distance=200;
SetMode(7,0,1023);
delay_ms(30);
PawGoFar(distance);
delay_ms(75);
LED1=0;
}
while(tt=='7')
{
USART2_RX_STA=0;
distance+=10;
if(distance>=520)distance=520;
SetMode(7,0,1023);
delay_ms(30);
PawGoNear(distance);
delay_ms(75);
LED0=0;
}
while(tt=='9')
{
USART2_RX_STA=0;
height+=10;
if(height>=750)height=750;
SetMode(6,0,1023);
delay_ms(30);
ArmRaiseUp(height);
delay_ms(75);
LED0=0;
}
while(tt=='a')
{
USART2_RX_STA=0;
height-=10;
if(height<=500)height=500;
SetMode(6,0,1023);
delay_ms(30);
ArmSetDown(height);
delay_ms(75);
LED1=0;
}
}
}
}
#include 4 实现效果

5 最后
包含内容
详细设计论文
项目分享:
https://gitee.com/sinonfin/sharing