协同算法的无人机集群控制理论技术分析,无人机集群飞行技术详解
随着无人机技术的普及和发展,无人机集群控制也逐渐成为了研究热点之一。而协同算法是实现无人机集群控制的重要手段之一。
在无人机集群控制中,协同算法确实是非常关键的部分。这些算法帮助无人机在复杂的飞行环境中保持队形,同时避免碰撞,确保整体行动的协调一致。

无人机集协同算法的概念及优点
协同算法是指通过多个智能体之间的协作和相互通信,以实现复杂任务或解决复杂问题的一类算法。在无人机集群控制中,协同算法主要用于实现无人机之间的协同作业,使其能够在空中完成复杂的任务。
协同算法通过制定无人机之间的相互作用规则,使得无人机可以像一支训练有素的队伍那样行动。其中,队形保持是这种协同的一种表现形式。为了实现队形保持,无人机之间的相对位置需要得到精确的控制。一种常见的方法是通过虚拟力的概念设计控制输入。这种虚拟力可以根据无人机之间的相对位置和队形要求来计算,并被用来调整无人机的位置。
相较于单个无人机的控制,无人机集群控制基于协同算法可以具有以下优点:
协同作业效率高:多个无人机之间可以形成协同作业的方式,从而提高作业效率,节省时间和资源。
安全性强:由于多个无人机之间可以相互通信和协作,从而在空中能够更好地协同避免碰撞等风险。
灵活性强:由于无人机集群控制基于协同算法,因此可以随时根据任务需求进行动态调整,实现任务的灵活性。
协同算法在无人机集群控制中的实现方式主要包括:
基于集中式控制:
即通过一个集中式控制器来控制和指导多个无人机完成任务。该方式需要保证控制器的可靠性,对无人机数量和任务类型的扩展性较差。避障也是无人机集群控制中非常重要的一环。基于球形几何体的编队避障算法是一种常见的方法。这种算法中,每个无人机将自己的实时目标位置广播给其他无人机。当有其他无人机进入某无人机的球形几何体时,避障算法就会被触发,并计算出一个弹簧力来推开那个无人机,从而避免碰撞,技术加V交流dh2541。
基于分布式控制:
即将控制指令分布到各个无人机上,并通过局部信息交换和传递实现协同作业。该方式具有较好的扩展性,但需要保证无人机之间相互通信的可靠性。
基于混合控制:
即综合了集中式控制和分布式控制的优点,建立起多级控制体系,实现分层次、分模块化的协同作业。该方式实现难度较大,但能够较好地综合各种控制方式的优点。
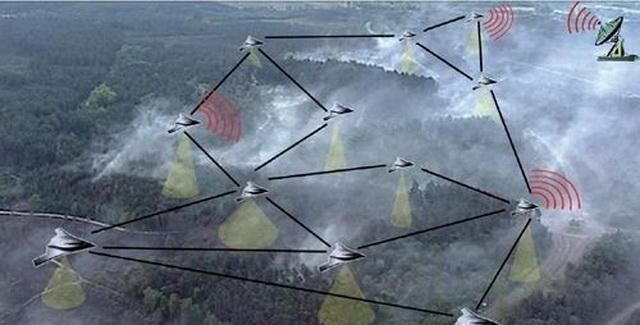
在实现这些算法的过程中,通信是另一个关键因素。主控机与无人机之间的通信通常通过UDP连接实现。无人机将自己的位置数据发送给主控机,主控机处理这些数据后,将任务指令、领导者位置信息和避障指令广播给所有无人机。这样,无人机就可以根据接收到的信息进行编队飞行。
无人机集群控制中的协同算法应用
在无人机集群控制中,协同算法起着非常重要的作用。这些算法的主要目标是确保无人机能够相互协作,保持一致的飞行状态,同时避免碰撞。协同算法可以帮助无人机实现多种功能,例如队形保持、避障和路径规划等。这些算法通常基于各种数学模型和控制理论,如线性代数、微分方程、最优控制等。

无人机编队控制,通过协同算法,可以实现无人机编队控制,即多个无人机按照特定的形态和路径进行飞行,完成特定任务。
无人机协同搜救,在应急救援等场景下,协同算法可以实现多个无人机之间的协作搜救,提高救援效率和生命安全。
无人机军事作战,在军事作战中,协同算法可以实现无人机之间的协同攻防,提高作战效果和作战成功率。
在队形保持方面,协同算法可以通过计算无人机之间的相对位置和速度,生成适当的控制输入,使无人机能够保持预定的队形。例如,可以使用基于虚拟力的方法来计算控制输入,该方法根据无人机之间的相对位置和队形要求计算出虚拟力,然后将其应用于无人机的控制系统中。
避障是另一个重要的应用领域。协同算法可以通过监测无人机周围的障碍物,并在必要时调整无人机的速度和方向,来避免与其他无人机或障碍物发生碰撞。这通常涉及到几何学和图形学的知识,以及使用如A*算法等路径规划技术。
路径规划也是协同算法的一个重要应用。通过路径规划,无人机可以在完成任务的同时,遵循预定的路径和规则,确保安全性并提高效率。这可以通过全局和局部路径规划算法来实现,例如A*算法等。
在实际应用中,协同算法还需要考虑其他因素,如无人机的动力限制、通信延迟、传感器误差等。因此,无人机集群控制的协同算法需要不断地进行研究和改进,以适应更复杂的环境和任务需求。