莫衷一是的自动驾驶算力抉择
/ 导读 /
11月29日,百度旗下集度汽车宣布,全球首款5nm汽车芯片高通SA8295P将率先搭载于集度汽车。明年4月北京车展集度将展出概念车型;2023年,首款量产车正式上市。
高通8295是第4代骁龙汽车数字座舱平台,CPU采用与骁龙888同一代的第6代Kryo CPU,GPU的3D渲染性能相比8155芯片有3倍性能提升,其AI算力达到30TOPS。看上去算力并不高,不过,这个芯片只是一个座舱平台,还不能与自动驾驶AI算力同日而语。
还有算力更低的案例,2021年初,商用车安全驾驶硬件和数据服务产品提供商所托瑞安基于英特尔子公司Mobileye EyeQ®4H SoC平台开发的新一代智能防碰撞方案,相比其他量产方案系统性能提升了约100倍,在满足使用需求的同时,2.5 TOPS的算力可以将平台整体功耗控制在9W以内;此外,摄像头可视角度增加了40%,探测距离更远(车辆探测超过200米、行人探测超过70米、摩托车探测超过80米),集成的DNN深度神经网络加速还能进一步扩展数据服务应用,最高支持L3级别。
这就搞不明白了,到底算力代表了什么?它又和哪些因素有关呢?

自动驾驶的算力与延迟
自动驾驶汽车将在安全性和效率方面体现真正的社会效益,它需要依靠人工智能、视觉计算、雷达、监控装置和全球定位系统的协同合作,让计算机在没有任何人类主动干预的控制下,自动安全地操控车辆。因此,人们将未来的汽车称为四个轮子上的超级计算机。
自动驾驶技术有三个重要层次:人工智能(AI)算法、运行AI的超级计算机(处理器芯片)和高分辨率地图。不管怎样,自动驾驶工作负载都需要尽可能低的延迟,这对保证车辆及时做出决策至关重要。
延迟与处理器芯片的计算能力(算力)有很大关系,当然也与系统架构有一定关系。所以,一提起自动驾驶,人们除了首先想到安全,马上就会想到处理器是否足够强大?拼算力的军备竞赛愈演愈烈也就不足为怪了。

算力是功能和性能的舞台
过去,汽车基本上就是一个打铁的行业,车就像一个铁疙瘩。但是,今天的汽车有了越来越多的科技属性,开始呈现从功能手机到智能手机那样的变化。汽车正成为移动的客厅、行走的机器人,具有越来越多的游戏属性、电影院属性,甚至越来越多的摄像头将使其成为一个全方位相机。而且,由于具有超强的算力,汽车也会成为一个游戏服务器,甚至未来可能成为一个挖矿机。
中科创达高级副总裁、智能汽车事业群总裁常衡生指出:“由于芯片算力不足加上零部件的组合方式,过去的汽车整体架构主要是以分布式ECU为主。一辆车可能有100多个ECU,现在由于汽车芯片算力以及汽车软件复杂性的提升,域集中控制架构成了一个非常流行的趋势。”

电子电气架构创新需要高算力芯片
黑芝麻智能科技CMO杨宇欣认为,智能汽车需要高性能计算芯片,“不管是什么技术路线和发展方向,高性能计算芯片都是智能驾驶产业发展的核心和基础。AI等技术的应用需要用算力支撑,算力就是一个支撑软件发展和硬件拓展的发动机。芯片决定功能和性能的边界,所以舞台的大小要由芯片来决定。”

高算力芯片是智能汽车大脑
他表示,无论是传感器还是算力,都要留有足够多的冗余,例如特斯拉的车出厂时可能是L2,但其硬件是按照L2+或L3级别设计的,后期可通过软件不断升级支持各种功能。特斯拉下一代车会标配游戏手柄,因为新款Model S的车载系统游戏性能已接近索尼PlayStation 5。这就是算力冗余的价值所在。

算力不断攀升是喜是忧?
在为自动驾驶计算平台选择处理器时,一些供应商一直在“争创TOPs”(每秒万亿次操作),越来越多功能的强大器件不断发布,当然也越来越耗电。从表面上看,TOPs越多越好,但与生活中的许多事情一样,现实并不总是那么简单。
中国工程院院士、中国电子科技集团公司第58研究所名誉所长许居衍认为:“面对AI的挑战,根据摩尔定律集成电路上容纳的晶体管数目大约每过18个月便会翻一番,但是AI训练的算力每3.4个月就会翻一番。可见,即使摩尔定律仍然有效,也满足不了算力的需求,更何况现在CPU已进入了瓶颈。”
智能驾驶芯片初创公司地平线创始人及CEO余凯也表示:“几百、上千TOPs算力的增长可能难以持续,毕竟有摩尔定律的物理极限,如果按照现在摩尔定律的功耗标准,超过了10000TOPs,汽车就会热的烫手,不可能正常行驶。”他认为,算力并不代表汽车智能芯片的真实性能。TOPs数值实际上是物理乘法器数目乘以最高主频,只是个理论数值,真正能够利用多少取决于和软件算法的配合,这与用户感受之间其实是一个间接关系。
话虽这么说,2021年7月,地平线发布向全场景整车智能的高性能大算力整车智能中央计算芯片征程®5,单颗芯片AI算力128TOPs。不知您做何感想?
现在的自动驾驶一直在模仿人类,人的视觉皮层处理速度非常快,准确度难以置信,几乎不用大脑巨大的处理能力。如果人类的大脑像今天的自动驾驶汽车一样工作,我们就不会作为一个物种存活下来。
鲍勃·尼斯在《决策的力量》(The Power of Five Bits)一书中描述人类大脑每秒处理一千兆比特(bit)信息,但只有50比特用于有意识思维。这是由多种进化因素造成的,包括由视觉皮层筛选出与生存无关的环境信息。
虽然人的眼睛总是在扫描,识别进入场景的新对象,但只将注意力集中在重要对象和受关注的区域,以此做出适当的响应。
当前的自主车辆利用激光雷达、摄像头、超声波和雷达的组合作为其“感官”,限于固定搜索模式连续(单向)收集信息。它们收集尽可能多的数据,然后在事件发生后进行校准、处理和分析。这种后处理速度很慢,无法实现实时捕获数据方式的变化。在高速公路,这种延迟会导致车辆在传感器数据处理完之前移动6米以上。
对树木、路缘、路边车辆、道路和其他静态对象的数据筛选也要巨大的算力和功耗,虽然算力在不断攀升,整个系统的能力并没有多大起色,难以避免风险。因此,关注一切,事后分析环境中的每一项,会牺牲及时行动的敏捷。这与人驾驶时处理时空数据的方式正好相反。
因此,那些为ADAS和自动驾驶选择计算平台的人在得出结论之前,需要超越TOPs数字的束缚,深入研究算法、软件成熟度、处理器架构和功耗以及硬件和软件之间的集成,还有应用的场景。

为什么算力要基于场景?
自动驾驶目前还处在发展初期,大家经常会问一个问题:到底需要多少算力?没有人能回答,主机厂也回答不上来。因为既要满足现在的算力要求,同时又要为日后留足冗余,所以就不停地向芯片厂商要算力。
地平线战略生态合作总监刘继锋说:“汽车智能芯片是硬科技的珠穆朗玛。在追赶特斯拉的过程中,尽管人们并不知道车辆需要多大算力,国内新造车势力和传统车企都在算力方面发力拼杀,但重要的是,结合实际应用场景、实际算法,才能把效能发挥到极致。”
他表示,除了芯片算力,感知是非常重要的因素,车辆对感知的需求呈现几何增长,从像素、数据量都对芯片和算法提出了很高的要求。
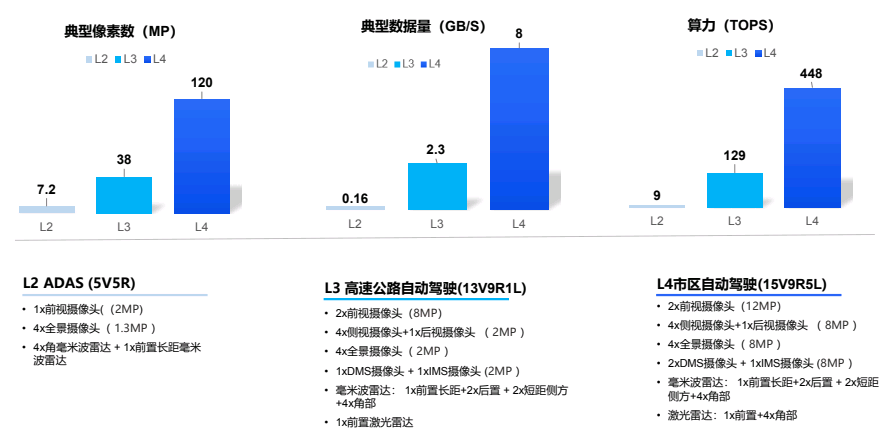
自动驾驶对感知的需求急剧提升
他说,大家都想去做软件定义汽车,都想效仿特斯拉,但是比较难。很多主机厂都在堆积算力,产品性能确实有所提升,但在品牌差异化方面,中国主机厂的供应商都是同一家或两家Tier 1,得到的软硬一体功能没有什么差别,这样就失去了竞争力,存在价格竞争、技术风险的隐患。
只有通过算法将场景需求和硬件结合起来,包括高精度检测要求、稳定性、低延时和带宽,将场景需求转变为芯片设计要求,才能实现软硬一体,满足真实场景处理要求。

算力如何分布?
车路协同是中国特色的自动驾驶方案,涉及车、路、云分层协同感知以及云端全局决策能力的下放,有助于突破单车感知和算力瓶颈,从系统维度赋予自动驾驶多层级安全冗余和巨大的决策效率优化空间。现阶段的主要应用是城市和高速场景,以提升交通系统的安全性,优化交通系统的运行效率。
英特尔中国研究院院长宋继强认为,智能驾驶基础设施必须依靠车端和边缘智能计算的开放融合。他解释说:“现在的云计算时代,我国和发达国家算力基础设施的差距开始缩小。而智能驾驶是一个非常需要传感和算力的时代,也需要网联。而这些传感和算力在哪里分布是一个大问题。”
传统上,传感和算力都分布在车里,需要搭载足够的算力才能实现AI能力。未来需要持续不断扩展AI能力,还要满足其他信息和更多功能的连接需求,这就决定了不能将传感、算力和各种新功能全部放在车机上,因为车企不可能一直升级硬件。
他指出,事实上,硬件迭代永远慢于软件迭代,软件定义实际上要靠分级构造的基础设施来实现。所以,尽管智能汽车一定会逐步升级,但其构造需要连续化扩展。
机会在哪里?传统观点认为,要通过网络把智能、软件能力融入云端。这在某些领域是可行的,因为升级数据就能实现,但在智能驾驶相关领域是无法满足要求的。因为这些领域需要更低的延迟,且传感器种类很多,数据量很大,难以满足时延要求,所以要靠边缘计算。
边缘计算可以定制化服务器和相应级别的算力资源,包括通信、网络带宽和存储。所以,充分的定制化有助于垂直领域做很多软硬件协同优化的工作,满足不同领域的特殊要求。

智能边缘成为算力融合关键
十字路口情况非常复杂,有一半交通事故发生在这里,它就是一个边缘。如果只靠车辆本身提高感知和算力,永远会存在人驾驶的问题——在视线遮挡时无法了解全局。
现实案例显示,在路口安装七个摄像头收集四个方向数据,加上边缘计算,就可以把各种传感器扩展到路口附近,通过算法把不同传感器检测到的物体运动轨迹合成在一起,形成全景视角,同时实时追踪车辆、行人、电动车等交通参与者的轨迹。当算力增强时,就可以超实时运行,预测未来可能发生的碰撞。如果再将数据叠加到高精地图上,车辆就可以实时知道前方可能发生什么情况。
工信部车联网安全领域专家委员会委员、联通智网科技股份有限公司总经理张然懋指出:“车路协同绕不开5G+车联网,现在IT基础设施的发展已经到了云网融合的阶段,网络的支撑带来了实现分布式云架构的可能性,而协同计算技术的出现也为算力的分布带来了一个新的有效的支撑方式。”
所以,自动驾驶网络应该是一个云网一体的多级分布网络,将引入更多边缘计算节点、网络中心、云智一体的概念,实现一个混合模式,满足各种场景下自动驾驶交互的环境要求。
算力分布只是一个方面,由于需要很短的计算和传输延时,加上各种传感器之间的同步要求,系统能力一定要不断增强,所以需要定制服务器。未来构建的一体化智能交通基础设施在各种设备、各种模块之间的互操作性非常关键。
互操作性可以解决传感器供应商很多、各家产品的互联互通的问题;还可以解决处理(计算、传输和存储)规范、模块接口协议的认证问题,以便确定以多大算力提供什么样的能力和延迟,保证监测的可靠性。

追求TOPs时,还应该考虑什么?
在选择自动驾驶处理器时,TOPs是不是应该作为首选?自动驾驶车辆服务研究分析公司Strategy Analytics在一份专门分析自动驾驶计算平台传统性能基准的报告中指出,人们不会停止将TOPs作为ADAS和自动驾驶处理器解决方案的指标,但很明显,系统开发人员在为其未来平台选择正确的解决方案时,需要远远超越这个简单的指标。自动驾驶的开发远不止深度学习,需要根据执行各种计算任务的实际性质考虑以下一些因素:
处理器设计效率。提供海量数据处理功能的解决方案似乎是开发环境的理想选择,但在扩展到经济高效的硬件时可能会遇到困难,不会对运行复杂算法有什么帮助。
芯片平台。了解芯片平台将用于哪些工作负载类型至关重要,以便对所需处理器的适当架构做出明智的判断。
硬件和软件的集成。集成程度将对性能产生重大影响,因此,需要全面评估选定供应商的硬件和软件生态系统的作用和能力。
硬件和软件之间的交互。对于云计算来说,盲目地认为需要在车辆中部署与云相同的架构是错误的,最理想的并不一定是汽车所需要的,这种模式需要打破。
功耗和成本。自动驾驶计算平台的功耗对车辆的成本和可用性具有现实影响。
原始 TOPs 数。在评估系统未来功能增长的“净空”时,原始 TOPs 数并不是一个有用的指标;灵活性才是一个更好的指标,选择能够从低端 ADAS 扩展到高端自动化的处理器解决方案可以带来许多好处。

需要按图索骥
算力不断攀升是好事,但如何根据自动驾驶车辆计算平台需要完成的非常复杂的工作负载,通过仔细的性能评估,将它送到需要的地方,如何按需分配,既有足够的冗余,又不浪费,的确是很有讲究的。
从芯片的发展来看,算力很重要,从客户需求及市场成熟度来看,L2+/L3已经是消费刚需,高算力的SoC芯片、AI计算芯片及图像处理器是自动驾驶演进的基础,但并不是推动自动驾驶发展的唯一动力,因为更重要的是芯片的综合计算能力。

欢迎加入智能交通群!加微信号automan332,标注”加群“。
