机器学习---概率图模型(隐马尔可夫模型、马尔可夫随机场、条件随机场)
1. 隐马尔可夫模型
机器学习最重要的任务是根据已观察到的证据(例如训练样本)对感兴趣的未知变量(例如类别标
记)进行估计和推测。概率模型(probabilistic model)提供了一种描述框架,将描述任务归结为
计算变量的概率分布,在概率模型中,利用已知的变量推测未知变量的分布称为“推断
(inference)”,其核心在于基于可观测的变量推测出未知变量的条件分布。
生成式:计算联合分布(, , ),判别式:计算条件分布(, |)
符号约定:为关心的变量的集合,O为可观测变量集合,R为其他变量集合
概率模型直接利用概率求和规则消去变量R的时间和空间复杂度为指数级别(2^( +||)),需要一
种能够简洁紧凑表达变量间关系的工具。
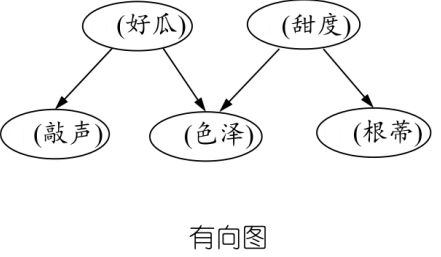
概率图模型(probabilistic graphical model)是一类用图来表达变量相关关系的概率模型。
图模型提供了一种描述框架,结点:随机变量(集合);边:变量之间的依赖关系
分类:有向图:贝叶斯网,使用有向无环图表示变量之间的依赖关系
无向图:马尔可夫网,使用无向图表示变量间的相关关系
概率图模型分类:有向图:贝叶斯网,无向图:马尔可夫网

隐马尔可夫模型(Hidden Markov Model,HMM)组成:状态变量:![]() ,通常假定是
,通常假定是
隐藏的,不可被观测的。取值范围为,通常有个可能取值的离散空间
观测变量:![]() 表示第 时刻的观测值集合,观测变量可以为离散或连续型,本章中只
表示第 时刻的观测值集合,观测变量可以为离散或连续型,本章中只
讨论离散型观测变量,取值范围X为![]()

隐马尔可夫模型(Hidden Markov Model,HMM):时刻的状态 仅依赖于( − 1),与其余
− 2个状态无关。马尔可夫链:系统下一时刻状态仅由当前状态决定,不依赖于以往的任何状态


HMM 的生成过程:
确定一个HMM需要三组参数 = [, , ] 。状态转移概率:模型在各个状态间转换的概率表示在任
意时刻t,若状态为si,下一状态为sj的概率
![]()
输出观测概率:模型根据当前状态获得各个观测值的概率。在任意时刻t,若状态为Si,则在下一
时刻状态为Sj的概率
![]()
初始状态慨率:模型在初始时刻各个状态出现的慨率
![]()

通过指定状态空间,观测空间和上述三组参数,就能确定一个隐马尔可夫模型。给定 = [, ,
] ,它按如下过程生成观察序列:
①设置 = 1, 并根据初始状态选择初始状态1
②根据 和输出观测概率 选择观测变量取值
③根据状态 和状态转移矩阵 转移模型状态,即确定+1
④若 < , 设置 = + 1,并转到②步,否则停止
HMM的基本问题:对于模型 = [, , ] ,给出具体应用定观测序列![]() 评估模型
评估模型
和观测序列之间![]() 的匹配程度:有效计算观测序列其产生的概率
的匹配程度:有效计算观测序列其产生的概率![]()
根据观测序列“推测”隐藏的模型状态y=![]()
参数学习:如何调整模型参数 = [, , ] ,以使得该序列出现的概率![]() 最大
最大
具体应用:根据以往的观测序列x=预测当前时刻最有可能的观测值;语音识别:根据观测的语音信
号推测最有可能的状态序列(即:对应的文字);通过数据学习参数(模型训练)
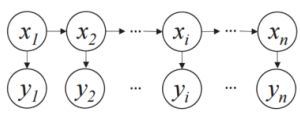
隐马尔可夫模型是关于时序的概率模型,描述由一个隐藏的马尔可夫链随机生成不可观测的状态随
机序列,再由各个状态生成一个观测而产生观测随机序列的过程。隐藏的马尔可夫链随机生成的状
态的序列,称为状态序列(state sequence):每个状态生成一个观测,而由此产生的观测的随机序
列,称为观测序列(observation sequence)。序列的每一个位置又可以看作是一个时刻。
隐马尔可夫模型由初始概率分布、状态转移概率分布以及观测概率分布确定。隐马尔可夫模型的形
式定义如下:设Q是所有可能的状态的集合,V是所有可能的观测的集合,

其中,N是可能的状态数,M是可能的观测数,I是长度为T的状态序列,O是对应的观测序列。

A是状态转移概率矩阵:
其中, 是在时刻t处于状态qi的条件下在时刻t+1
是在时刻t处于状态qi的条件下在时刻t+1
转移到状态qj的概率。
B是观测概率矩阵:
其中,![]() 是在时刻t处于状态qj的条件下生成
是在时刻t处于状态qj的条件下生成
观测vk的概率。π是初始状态概率向量:π=(πi),其中,![]() 是时刻t=1
是时刻t=1
处于状态qi的概率。
隐马尔可夫模型由初始状态概率向量π、状态转移概率矩阵A和观测概率矩阵B决定。π和A决定状
态序列,B决定观测序列。因此,隐马尔可夫模型入可以用三元符号表示,即 = [, , ] ,, ,
称为隐马尔可夫模型的三要素。
齐次马尔可夫性假设,即假设隐藏的马尔可夫链在任意时刻t的状态只依赖于其前一时刻的状态,
与其他时刻的状态及观测无关,也与时刻t无关。

观测独立性假设,即假设任意时刻的观测只依赖于该时刻的马尔可夫链的状态,与其他观测及状态
无关。
例如,一段文字中名词、动词、形容词三类词出现的情况可由三个状态的马尔可夫模型描述:
状态S1:名词,S2:动词,S3:形容词
假设状态转移矩阵:
如果其中某一句话第一个词为名词,那么该句子中这三类词出现的顺序为0=“名动形名”的概率为:
![]()
![]()

![]()
系统初始化时可以定义一个初始状态的概率向量
隐马尔可夫链示意图:

2. 马尔可夫随机场
马尔可夫随机场(Markov Random Field,MRF)是典型的马尔可夫网,著名的无向图模型
图模型表示:结点表示变量(集),边表示依赖关系。有一组势函数(Potential Functions),亦称
“因子”(factor),这是定义在变量子集上的非负实函数,主要用于定义概率分布函数
马尔可夫随机场(Markov Random Field,MRF)分布形式化:使用基于极大团的势函数(因子)
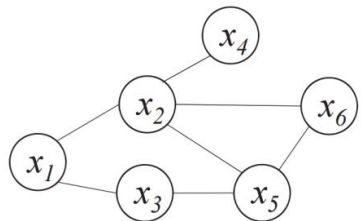
对于图中结点的一个子集,若其中任意两结点间都有边连接,则称该结点子集为一个“团”
(clique)。若一个团中加入另外任何一个结点都不再形成团,则称该团为“极大团”(maximal
clique),图中 1, 2 , {2, 6} , {2, 5, 6}等为团,图中{2, 6}不是极大团,每个结点至少出现
在一个极大团中,多个变量之间的连续分布可基于团分解为多个因子的乘积。
基于极大团的势函数(因子)多个变量之间的连续分布可基于团分解为多个因子的乘积,每个因子
只与一个团相关。对于n个变量x={x1,x2,...xn},所有团构成的集合为C,与团Q∈C对应的变量集合
记为XQ,则联合概率定义为: 。
。
其中,![]() 是基于团Q对应的势函数,Z为概率的规范化因子,在实际应用中,Z往往很难精确计
是基于团Q对应的势函数,Z为概率的规范化因子,在实际应用中,Z往往很难精确计
算,但很多任务中,不需要对Z进行精确计算若变量问题较多,则团的数目过多,上式的乘积项过
多,会给计算带来负担,所以需要考虑极大团。
基于极大团的势函数:通过极大团构造势函数。若团Q不是一个极大团,则必然被一个极大团Q*包
含,这意味着变量的关系不仅体现在势函数![]() 中,还体现在
中,还体现在![]() *中联合概率分布可以使用极大
*中联合概率分布可以使用极大
团定义假设所有极大团构成的集合为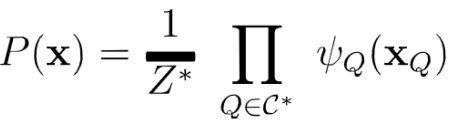 其中,Z*是规范化因子
其中,Z*是规范化因子
 。
。
基于极大团的势函数:联合概率分布可以使用极大团定义,假设所有极大团构成的集合为∗。
联合概率分布![]()
马尔可夫随机场中的分离集:马尔可夫随机场中得到“ 条件独立性”。借助“分离”的概念,若从结点
集 中的结点到 中的结点都必须经过结点集 中的结点,则称结点集 , 被结点集 分离,
称 为分离集(separating set)。
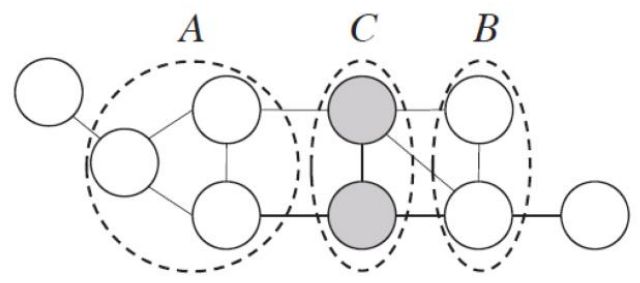
全局马尔可夫性:马尔可夫随机场中得到“条件独立性”,借助“分离”的概念,可以得到:全局马尔
可夫性(global Markov property):在给定分离集的条件下, 两个变量子集条件独立。
图模型简化:
得到图模型的联合概率为:
全局马尔可夫性的验证: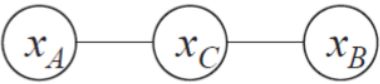
条件概率:
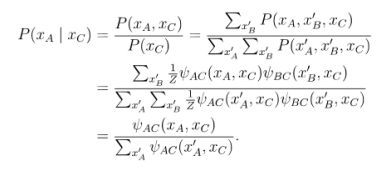
验证:
马尔可夫随机场中的条件独立性:
由全局马尔可夫性可以导出:局部马尔可夫性(local Markov property):在给定邻接变量的情况下,
一个变量条件独立于其它所有变量令V为图的结点集,n(v)为结点v在图上的邻接节点,
![]()
![]()
成对马尔可夫性(pairwise Markov property):在给定所有其它变量的情况下,两个非邻接变量条件
独立令V为图的结点集,边集为E,对图中的两个结点u,v,若![]()
势函数![]() 的作用是定量刻画变量集XQ中变量的相关关系,应为非负函数,且在所偏好的变
的作用是定量刻画变量集XQ中变量的相关关系,应为非负函数,且在所偏好的变
量取值上有较大的函数值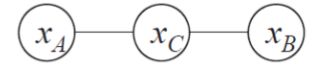
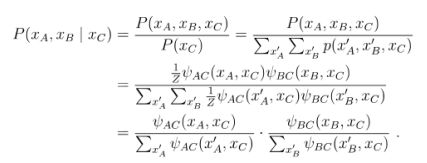
上图中,假定变量均为二值变量,定义势函数:


说明模型偏好xA与xc有相同的取值,xB与xc有不同的取值,换言xA与xc正相关,xB与xc负相关。
所以令xA与xc相同且xB与xc不同的变量值指派將有较高的联合慨率。
势函数![]() 的作用是定量刻画变量集xQ中变量的相关关系,应为非负函数,且在所偏好的变
的作用是定量刻画变量集xQ中变量的相关关系,应为非负函数,且在所偏好的变
量取值上有较大的函数值口为了满足非负性,指数函数常被用于定义势函数,即:
 ,其中,
,其中,![]() 是一个定义在变量xQ上的实值函数,常见形式为:
是一个定义在变量xQ上的实值函数,常见形式为:
 ,其中,
,其中,![]() 是参数,上式第一项考虑每一对
是参数,上式第一项考虑每一对
结点的关系,第二项考虑单结点。
3. 条件随机场
条件随机场(Conditional Random Field,(CRF)是一种判别式无向图模型(可看作给定观测值的
MRF),条件随机场对多个变量给定相应观测值后的条件概率进行建模,若令x={x1,X2,…,X}为观测
序列,y={y1,y2,,y}为对应的标记序列,CRF的目标是构建条件概率模型P(y|x)
标记变量y可以是结构型变量,它各个分量之间具有某种相关性。
自然语言处理的词性标注任务中,观测数据为语句(单词序列),标记为相应的词性序列,具有线
性序列结构在语法分析任务中,输出标记是语法树,具有树形结构

令G=(V,E)表示结点与标记变量y中元素一一对应的无向图。无向图中,yv表示与节点v对应的标记
变量,n(v)表示结点v的邻接结点,若图中的每个结点都满足马尔可夫性,
 则(y,x)构成条件随机场。
则(y,x)构成条件随机场。
CRF使用势函数和图结构上的团来定义P(y|x)。本章仅考虑链式条件随机场(chain-structured
CRF),如下所亦:
链式条件随机场(chain-structured CRF)包含两种关于标记变量的团:![]() 相邻的标记变量,
相邻的标记变量,
单个标记变量![]() ;条件概率可被定义为:
;条件概率可被定义为:

![]() 是定义在观测序列的两个
是定义在观测序列的两个
相邻标记位置上的转移特征函数(transition feature function),用于刻画相令邻标记变量之间的相关
关系以及观测序列对它们的影响,![]() 是定义在观测序列的标记位置i上的状态特征函数
是定义在观测序列的标记位置i上的状态特征函数
(statusfeature function),用于刻画观测序列对标记变量的影响,![]() 为参数,Z为规范化因子
为参数,Z为规范化因子
特征函数通常是实值函数,以刻画数据的一些很可能成立或者期望成立的经验特性,以词性标注任
务为例:

采用特征函数:
表示第个观测值xi为单词'knock'时,相应的标记yi,yi+1很可能分别为[V],[P]。
MRF 与CRF的对比:
MRF:使用团上的势函数定义概率,对联合概率建模


CRF:使用团上的势函数定义概率,有观测变量,对条件概率建模

