《动手学深度学习(PyTorch版)》笔记6.1
注:书中对代码的讲解并不详细,本文对很多细节做了详细注释。另外,书上的源代码是在Jupyter Notebook上运行的,较为分散,本文将代码集中起来,并加以完善,全部用vscode在python 3.9.18下测试通过,同时对于书上部分章节也做了整合。
Chapter6 Convolutional Neural Network(CNN)
6.1 Basic Concepts
卷积神经网络将空间不变性(spatial invariance)这一概念系统化,并基于这个模型使用较少的参数来学习有用的表示,总结为以下两点:
- 平移不变性(translation invariance):不管检测对象出现在图像中的哪个位置,神经网络的前面几层应该对相同的图像区域具有相似的反应。
- 局部性(locality):神经网络的前面几层应该只探索输入图像中的局部区域,而不过度在意图像中相隔较远区域的关系。最终,可以聚合这些局部特征,以在整个图像级别进行预测。
为了方便理解,我们可以认为无论是输入还是隐藏表示都拥有空间结构。使用 [ X ] i , j [\mathbf{X}]_{i, j} [X]i,j和 [ H ] i , j [\mathbf{H}]_{i, j} [H]i,j分别表示输入图像和隐藏表示中位置( i i i, j j j)处的像素。为了使每个隐藏神经元都能接收到每个输入像素的信息,我们将参数从权重矩阵替换为四阶权重张量 W \mathsf{W} W。假设 U \mathbf{U} U包含偏置参数,我们可以将全连接层形式化地表示为
[ H ] i , j = [ U ] i , j + ∑ k ∑ l [ W ] i , j , k , l [ X ] k , l = [ U ] i , j + ∑ a ∑ b [ V ] i , j , a , b [ X ] i + a , j + b . \begin{aligned} \left[\mathbf{H}\right]_{i, j} &= [\mathbf{U}]_{i, j} + \sum_k \sum_l[\mathsf{W}]_{i, j, k, l} [\mathbf{X}]_{k, l}\\ &= [\mathbf{U}]_{i, j} + \sum_a \sum_b [\mathsf{V}]_{i, j, a, b} [\mathbf{X}]_{i+a, j+b}.\end{aligned} [H]i,j=[U]i,j+k∑l∑[W]i,j,k,l[X]k,l=[U]i,j+a∑b∑[V]i,j,a,b[X]i+a,j+b.
其中,实现从 W \mathsf{W} W到 V \mathsf{V} V的转换只需重新索引下标 ( k , l ) (k, l) (k,l),使 k = i + a k = i+a k=i+a、 l = j + b l = j+b l=j+b, [ V ] i , j , a , b = [ W ] i , j , i + a , j + b [\mathsf{V}]_{i, j, a, b} = [\mathsf{W}]_{i, j, i+a, j+b} [V]i,j,a,b=[W]i,j,i+a,j+b.
6.1.1 Translation Invariance
平移不变性意味着检测对象在输入 X \mathbf{X} X中的平移,应该仅导致隐藏表示 H \mathbf{H} H中的平移。也就是说, V \mathsf{V} V和 U \mathbf{U} U实际上不依赖于 ( i , j ) (i, j) (i,j)的值,即 [ V ] i , j , a , b = [ V ] a , b [\mathsf{V}]_{i, j, a, b} = [\mathbf{V}]_{a, b} [V]i,j,a,b=[V]a,b,并且 U \mathbf{U} U是一个常数 u u u。因此,我们可以简化 H \mathbf{H} H定义为:
[ H ] i , j = u + ∑ a ∑ b [ V ] a , b [ X ] i + a , j + b . [\mathbf{H}]_{i, j} = u + \sum_a\sum_b [\mathbf{V}]_{a, b} [\mathbf{X}]_{i+a, j+b}. [H]i,j=u+a∑b∑[V]a,b[X]i+a,j+b.
这就是卷积(convolution)。我们是在使用系数 [ V ] a , b [\mathbf{V}]_{a, b} [V]a,b对位置 ( i , j ) (i, j) (i,j)附近的像素 ( i + a , j + b ) (i+a, j+b) (i+a,j+b)进行加权得到 [ H ] i , j [\mathbf{H}]_{i, j} [H]i,j。
注意, [ V ] a , b [\mathbf{V}]_{a, b} [V]a,b的系数比 [ V ] i , j , a , b [\mathsf{V}]_{i, j, a, b} [V]i,j,a,b少很多。
6.1.2 Locality
局部性要求,为了收集用来训练参数 [ H ] i , j [\mathbf{H}]_{i, j} [H]i,j的相关信息,我们不应偏离到距 ( i , j ) (i, j) (i,j)很远的地方。这意味着在 ∣ a ∣ > Δ |a|> \Delta ∣a∣>Δ或 ∣ b ∣ > Δ |b| > \Delta ∣b∣>Δ的范围之外,我们可以设置 [ V ] a , b = 0 [\mathbf{V}]_{a, b} = 0 [V]a,b=0。因此,我们可以将 [ H ] i , j [\mathbf{H}]_{i, j} [H]i,j重写为
[ H ] i , j = u + ∑ a = − Δ Δ ∑ b = − Δ Δ [ V ] a , b [ X ] i + a , j + b . (1) [\mathbf{H}]_{i, j} = u + \sum_{a = -\Delta}^{\Delta} \sum_{b = -\Delta}^{\Delta} [\mathbf{V}]_{a, b} [\mathbf{X}]_{i+a, j+b}.\tag{1} [H]i,j=u+a=−Δ∑Δb=−Δ∑Δ[V]a,b[X]i+a,j+b.(1)
式(1)是一个卷积层(convolutional layer),而卷积神经网络是包含卷积层的一类特殊的神经网络。 V \mathbf{V} V被称为卷积核(convolution kernel)或者滤波器(filter),亦或简单地称之为该卷积层的权重,通常该权重是可学习的参数。
卷积操作原理如图:
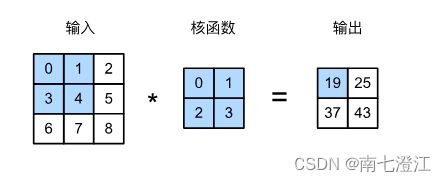
输入大小为 n h × n w n_h \times n_w nh×nw,卷积核大小 k h × k w k_h \times k_w kh×kw,输出大小为 ( n h − k h + 1 ) × ( n w − k w + 1 ) . (n_h-k_h+1) \times (n_w-k_w+1). (nh−kh+1)×(nw−kw+1).输出的卷积层有时被称为特征映射(feature map),因为它可以被视为一个输入映射到下一层的空间维度的转换器。在卷积神经网络中,对于某一层的任意元素 x x x,其感受野(receptive field)是指在前向传播期间可能影响 x x x计算的所有元素(来自所有先前层),因此感受野可能大于输入的实际大小。
当图像处理的局部区域很小时,卷积神经网络与多层感知机的训练差异可能是巨大的:多层感知机可能需要数十亿个参数来表示网络中的一层,而卷积神经网络通常只需要几百个参数,而且不需要改变输入或隐藏表示的维数。参数大幅减少的代价是,我们的特征现在是平移不变的,并且当确定每个隐藏活性值时,每一层只包含局部的信息。以上所有的权重学习都将依赖于归纳偏置,当这种偏置与现实相符时,我们就能得到样本有效的模型,并且这些模型能很好地泛化到未知数据中,但如果这偏置与现实不符时(比如当图像不满足平移不变),我们的模型可能难以拟合训练数据。
注:在数学中,两个函数(比如 f , g : R d → R f, g: \mathbb{R}^d \to \mathbb{R} f,g:Rd→R)之间的“卷积”被定义为
( f ∗ g ) ( x ) = ∫ f ( z ) g ( x − z ) d z . (f*g)(\mathbf{x}) = \int f(\mathbf{z}) g(\mathbf{x}-\mathbf{z}) d\mathbf{z}. (f∗g)(x)=∫f(z)g(x−z)dz.
对于离散对象时,积分就变成求和。例如,对于由索引为 Z \mathbb{Z} Z的、平方可和的、无限维向量集合中抽取的向量,我们有以下定义:
( f ∗ g ) ( i ) = ∑ a f ( a ) g ( i − a ) . (f*g)(i) = \sum_a f(a) g(i-a). (f∗g)(i)=a∑f(a)g(i−a).
对于二维张量,则为:
( f ∗ g ) ( i , j ) = ∑ a ∑ b f ( a , b ) g ( i − a , j − b ) . (f*g)(i, j) = \sum_a\sum_b f(a, b) g(i-a, j-b). (f∗g)(i,j)=a∑b∑f(a,b)g(i−a,j−b).
上式看起来类似于式(1),但有一个主要区别:这里不是使用 ( i + a , j + b ) (i+a, j+b) (i+a,j+b),而是使用差值。我们在式(1)中其实定义了互相关(cross-correlation)而非数学上的卷积,但是两种运算的结果是相同的,在互相关运算中卷积核的元素与(i,j)右下角的元素对应相乘,而卷积中卷积核的元素对应的是(i,j)左上角的元素。为了与深度学习文献中的标准术语保持一致,我们将继续把“互相关运算”称为卷积运算。
6.1.3 Channels
我们之前忽略了图像一般包含三个通道/三种原色(红色、绿色和蓝色)。因此,我们将 X \mathsf{X} X索引为 [ X ] i , j , k [\mathsf{X}]_{i, j, k} [X]i,j,k。由此卷积相应地调整为 [ V ] a , b , c [\mathsf{V}]_{a,b,c} [V]a,b,c,而不是 [ V ] a , b [\mathbf{V}]_{a,b} [V]a,b。此外,由于输入图像是三维的,隐藏表示 H \mathsf{H} H也最好采用三维张量。换句话说,对于每一个空间位置,我们想要采用一组而不是一个隐藏表示,这样一组隐藏表示可以想象成一些互相堆叠的二维网格,因此我们可以把隐藏表示想象为一系列具有二维张量的通道(channel),这些通道有时也被称为特征映射(feature maps),因为每个通道都向后续层提供一组空间化的学习特征。直观上可以想象在靠近输入的底层,一些通道专门识别边缘,而一些通道专门识别纹理。
为了支持输入 X \mathsf{X} X和隐藏表示 H \mathsf{H} H中的多个通道,我们可以在 V \mathsf{V} V中添加第四个坐标,即 [ V ] a , b , c , d [\mathsf{V}]_{a, b, c, d} [V]a,b,c,d。综上所述,
[ H ] i , j , d = ∑ a = − Δ Δ ∑ b = − Δ Δ ∑ c [ V ] a , b , c , d [ X ] i + a , j + b , c , [\mathsf{H}]_{i,j,d} = \sum_{a = -\Delta}^{\Delta} \sum_{b = -\Delta}^{\Delta} \sum_c [\mathsf{V}]_{a, b, c, d} [\mathsf{X}]_{i+a, j+b, c}, [H]i,j,d=a=−Δ∑Δb=−Δ∑Δc∑[V]a,b,c,d[X]i+a,j+b,c,
其中隐藏表示 H \mathsf{H} H中的索引 d d d表示输出通道,而随后的输出将继续以三维张量 H \mathsf{H} H作为输入进入下一个卷积层。