yolo,c++目标识别
- yolo 官网 https://pjreddie.com/darknet/yolo/
- yolo github https://github.com/pjreddie/darknet/
下载编译yolo源码
git clone https://github.com/pjreddie/darknet
cd darknet
make
下载预训练权值文件
wget https://pjreddie.com/media/files/yolov3.weights
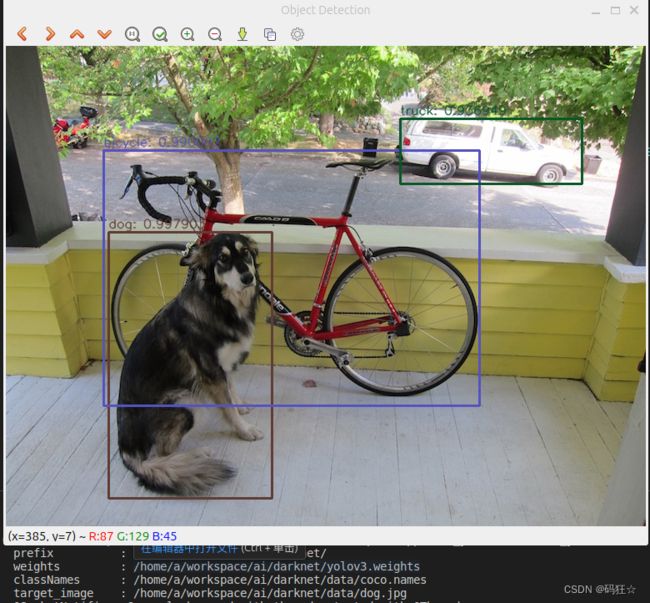
预览效果
./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg
ubuntu 环境,确保系统安装opencv
sudo apt-get install libopencv-dev
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
enable_language(C CXX)
set(CXX_STANDARD 11)
project(test_yolo)
find_package(OpenCV REQUIRED)
set(TARGET test_yolo)
add_executable(${TARGET} main.cpp)
target_link_libraries(${TARGET} ${OpenCV_LIBS})
main.cpp
#include
#include
#include
#include
#include
using namespace std;
std::vector<std::string> getOutputsNames(const cv::dnn::Net& net) {
std::vector<std::string> names;
std::vector<int> outLayers = net.getUnconnectedOutLayers();
std::vector<cv::String> layerNames = net.getLayerNames();
for (int i = 0; i < outLayers.size(); i++) {
int layerIndex = outLayers[i] - 1;
if (layerIndex >= 0 && layerIndex < layerNames.size()) {
names.push_back(layerNames[layerIndex]);
}
}
return names;
}
void postprocess(cv::Mat& frame, const std::vector<cv::Mat>& outs, const std::vector<std::string>& classes) {
float confThreshold = 0.5;
std::vector<int> classIds;
std::vector<float> confidences;
std::vector<cv::Rect> boxes;
std::vector<cv::Scalar> classColors(classes.size());
for (size_t i = 0; i < classes.size(); ++i) {
classColors[i] = cv::Scalar(rand() % 255, rand() % 255, rand() % 255);
}
for (size_t i = 0; i < outs.size(); ++i) {
float* data = (float*)outs[i].data;
for (int j = 0; j < outs[i].rows; ++j, data += outs[i].cols) {
cv::Mat scores = outs[i].row(j).colRange(5, outs[i].cols);
cv::Point classIdPoint;
double confidence;
cv::minMaxLoc(scores, 0, &confidence, 0, &classIdPoint);
if (confidence > confThreshold) {
int centerX = (int)(data[0] * frame.cols);
int centerY = (int)(data[1] * frame.rows);
int width = (int)(data[2] * frame.cols);
int height = (int)(data[3] * frame.rows);
int left = centerX - width / 2;
int top = centerY - height / 2;
classIds.push_back(classIdPoint.x);
confidences.push_back((float)confidence);
boxes.push_back(cv::Rect(left, top, width, height));
}
}
}
std::vector<int> indices;
cv::dnn::NMSBoxes(boxes, confidences, confThreshold, 0.4, indices);
for (size_t i = 0; i < indices.size(); ++i) {
int idx = indices[i];
cv::Rect box = boxes[idx];
int classId = classIds[idx];
float confidence = confidences[idx];
cv::rectangle(frame, box, classColors[classId], 2);
std::string label = classes[classId] + ": " + std::to_string(confidence);
int baseline;
cv::Size labelSize = cv::getTextSize(label, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseline);
cv::putText(frame, label, cv::Point(box.x, box.y - 5),
cv::FONT_HERSHEY_SIMPLEX, 0.5, classColors[classId], 1, cv::LINE_AA);
}
}
int main() {
std::string prefix = "/home/a/workspace/ai/darknet/" ;
std::string cfg = prefix+"cfg/yolov3.cfg";
std::string weights = prefix+"yolov3.weights" ;
std::string classNames = prefix+"data/coco.names";
std::string target_image = prefix + "data/dog.jpg";
std::cout<<"prefix : "<<prefix <<std::endl;
std::cout<<"weights : "<<weights <<std::endl;
std::cout<<"classNames : "<<classNames <<std::endl;
std::cout<<"target_image : "<<target_image <<std::endl;
cv::dnn::Net net = cv::dnn::readNetFromDarknet(cfg, weights);
if (net.empty()) {
std::cerr << "Failed to load YOLO model." << std::endl;
return -1;
}
std::ifstream classesFile(classNames);
if (!classesFile.is_open()) {
std::cerr << "Failed to open class names file." << std::endl;
return -1;
}
std::vector<std::string> classes;
std::string className;
while (std::getline(classesFile, className)) {
classes.push_back(className);
}
cv::Mat frame = cv::imread(target_image);
if (frame.empty()) {
std::cerr << "Failed to load image." << std::endl;
return -1;
}
cv::Mat blob = cv::dnn::blobFromImage(frame, 1 / 255.0, cv::Size(416, 416), cv::Scalar(0, 0, 0), true, false);
net.setInput(blob);
std::vector<cv::Mat> outs;
net.forward(outs, getOutputsNames(net));
postprocess(frame, outs, classes);
cv::imshow("Object Detection", frame);
cv::waitKey(0);
return 0;
}