学习FreeRTOS(二) - 任务创建
进入到main函数,我们只需要while(1){ do task 0; do task 1; do task 2; } 就可以做一些简单的工作,这种轮询系统过于简单,很多功能都不能实现, 比如说,如何处理外部中断。
如果在这种轮询系统加上中断处理呢, 比如说,在main()中初始化中断,设置中断函数(interrupt service routine), 那样不就是一个简单的实时系统嘛?是的,在我之前碰到过的数字信号处理芯片(DSP)中,用的都是这种简单的机制,我们称之为前后台系统。
如果我们设计的任务,比如说,task 0 , task 1, task 2 相互独立,如果,我需要task 0的优先级高于其他两个任务,不想它们同等对待,根据需要的功能,分配cpu时间(抢占式),或者说,我们要task 0/1/2平均cpu使用的时间,大家各运行1/3的时间(时间片, 即设置相同优先级),或者,高优先级任务不会抢占当前正在运行状态的低优先级任务(freeRTOS通过SysTick, 下一个时间片,高优先级会抢占低优先级任务运行),直到低优先级任务完成进入阻塞状态(比如调用vTaskDelay()函数)或就绪状态(比如调用taskYIELD()函数[1])或者被系统置于挂起状态后才会切换任务(协作式), 那么我们就可以用多任务操作系统,通过这样的系统,通过各种配置,不仅可以实现简单的轮询和前后台系统,可以做到更复杂的应用需求,可以实现对cpu的最优利用率以及实时性, 操作系统就应该是具备通用性。 缺点就是学习周期较长,需要理解各种操作系统的API。 freeRTOS就是一种多任务系统。在FreeRTOSConfig.h文件中,将如下宏configUSE_PREEMPTION定义为0,就使能了协作式调度, 1则为抢占式和时间片式。
[1] 如果configUSE_PREEMPTION设置为1,则RTOS调度程序将始终运行能够运行的最高优先级任务,因此调用taskYIELD()不会导致切换到更高优先级的任务。
在FreeRTOS中,线程(Thread)和任务(Task)的概念是相同的。每个任务就是一个线程,有着自己的一个程序。函数的模型示例如下所示,通常情况下包含一个永远不会退出的循环体。接下来,我们带着问题去看freeRTOS里面的任务以及其调度:
a. 如何 创建任务: 静态创建任务/动态创建任务
BaseType_t xTaskCreate( TaskFunction_t pvTaskCode,
const char * const pcName,
uint16_t usStackDepth,
void *pvParameters,
UBaseType_t uxPriority,
TaskHandle_t *pxCreatedTask );
pvTaskCode 这是一个函数指针,指向执行任务的函数
pcName 任务的描述名称,方便调试,不用的话可以设为Null
usStackDepth 每个任务有自己的栈空间,这里根据任务占用需求设置栈空间的大小,单位是字(Word)
pvParameters 用于传递给任务的参数,不用的话可以设为Null
uxPriority 设置任务的优先级,范围由0到(configMAX_PRIORITIES – 1)。数值越大,等级越高
pxCreatedTask 任务的具柄(handle),通过具柄可以对任务进行设置,比如改变任务优先级等,不用可以设为Null
函数的返回值有两个pdPass和pdFail,pdPass表示任务创建成功,相反pdFail表示创建失败,创建失败的原因大多是因为系统没有足够的堆空间来保存任务。
它的源码如下:
第一步:分配一个stack buffer
第二步:分配一个TCB空间
{
StackType_t *pxStack;
/* Allocate space for the stack used by the task being created. */
pxStack = ( StackType_t * ) pvPortMalloc( ( ( ( size_t ) usStackDepth ) * sizeof( StackType_t ) ) ); /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
if( pxStack != NULL )
{
/* Allocate space for the TCB. */
pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) ); /*lint !e961 MISRA exception as the casts are only redundant for some paths. */
if( pxNewTCB != NULL )
{
/* Store the stack location in the TCB. */
pxNewTCB->pxStack = pxStack;
}
else
{
/* The stack cannot be used as the TCB was not created. Free
it again. */
vPortFree( pxStack );
}
}
else
{
pxNewTCB = NULL;
}
}
#endif /* portSTACK_GROWTH */

第三步:初始化新任务 (prvInitialiseNewTask())
第四步:添加任务到就绪list里面(prvAddNewTaskToReadyList())
if( pxNewTCB != NULL )
{
prvInitialiseNewTask( pxTaskCode, pcName, ( uint32_t ) usStackDepth, pvParameters, uxPriority, pxCreatedTask, pxNewTCB, NULL );
prvAddNewTaskToReadyList( pxNewTCB );
xReturn = pdPASS;
}
else
{
xReturn = errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY;
}
这里暂停一下, 详细介绍一下第三步和第四步:
关于TCB的定义
/*
* Task control block. A task control block (TCB) is allocated for each task,
* and stores task state information, including a pointer to the task's context
* (the task's run time environment, including register values)
*/
typedef struct tskTaskControlBlock
{
volatile StackType_t *pxTopOfStack; /*< Points to the location of the last item placed on the tasks stack. THIS MUST BE THE FIRST MEMBER OF THE TCB STRUCT. */
ListItem_t xStateListItem; /*< The list that the state list item of a task is reference from denotes the state of that task (Ready, Blocked, Suspended ). */
ListItem_t xEventListItem; /*< Used to reference a task from an event list. */
UBaseType_t uxPriority; /*< The priority of the task. 0 is the lowest priority. */
StackType_t *pxStack; /*< Points to the start of the stack. */
char pcTaskName[ configMAX_TASK_NAME_LEN ];/*< Descriptive name given to the task when created. Facilitates debugging only. */ /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
// some other elements with optional compile option
} tskTCB;
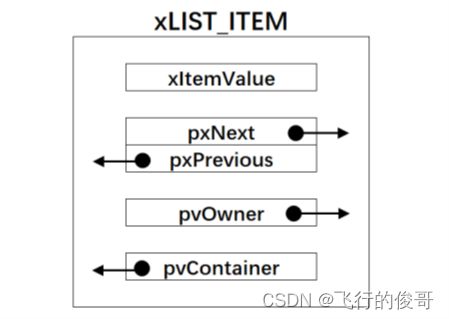
关于ListItem_t的定义
struct xLIST_ITEM
{
listFIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
configLIST_VOLATILE TickType_t xItemValue; /*< The value being listed. In most cases this is used to sort the list in descending order. */
struct xLIST_ITEM * configLIST_VOLATILE pxNext; /*< Pointer to the next ListItem_t in the list. */
struct xLIST_ITEM * configLIST_VOLATILE pxPrevious; /*< Pointer to the previous ListItem_t in the list. */
void * pvOwner; /*< Pointer to the object (normally a TCB) that contains the list item. There is therefore a two way link between the object containing the list item and the list item itself. */
void * configLIST_VOLATILE pvContainer; /*< Pointer to the list in which this list item is placed (if any). */
listSECOND_LIST_ITEM_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
};
- In prvInitialiseNewTask()
pxNewTCB->uxPriority = uxPriority;
listSET_LIST_ITEM_OWNER( &( pxNewTCB->xStateListItem ), pxNewTCB );
/* Event lists are always in priority order. */
listSET_LIST_ITEM_VALUE( &( pxNewTCB->xEventListItem ), ( TickType_t ) configMAX_PRIORITIES - ( TickType_t ) uxPriority ); /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
listSET_LIST_ITEM_OWNER( &( pxNewTCB->xEventListItem ), pxNewTCB );
d) In prvAddNewTaskToReadyList()
uxCurrentNumberOfTasks++;
if( pxCurrentTCB == NULL )
{
/* There are no other tasks, or all the other tasks are in
the suspended state - make this the current task. */
pxCurrentTCB = pxNewTCB;
if( uxCurrentNumberOfTasks == ( UBaseType_t ) 1 )
{
/* This is the first task to be created so do the preliminary
initialisation required. We will not recover if this call
fails, but we will report the failure. */
prvInitialiseTaskLists();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
==> 如果是第一次创建任务, 初始化任务列表(prvInialiseTaskLists()),走进该函数:
static void prvInitialiseTaskLists( void )
{
UBaseType_t uxPriority;
for( uxPriority = ( UBaseType_t ) 0U; uxPriority < ( UBaseType_t ) configMAX_PRIORITIES; uxPriority++ )
{
vListInitialise( &( pxReadyTasksLists[ uxPriority ] ) );
}
vListInitialise( &xDelayedTaskList1 );
vListInitialise( &xDelayedTaskList2 );
vListInitialise( &xPendingReadyList );
#if ( INCLUDE_vTaskDelete == 1 )
{
vListInitialise( &xTasksWaitingTermination );
}
#endif /* INCLUDE_vTaskDelete */
#if ( INCLUDE_vTaskSuspend == 1 )
{
vListInitialise( &xSuspendedTaskList );
}
#endif /* INCLUDE_vTaskSuspend */
/* Start with pxDelayedTaskList using list1 and the pxOverflowDelayedTaskList
using list2. */
pxDelayedTaskList = &xDelayedTaskList1;
pxOverflowDelayedTaskList = &xDelayedTaskList2;
}
有configMAX_PRIORITIES条list列表,每一条对应一个优先级任务list表
Priority 0: task 0, task 3, task 4
Priority 1: task 1, task 2, task 5
……
至于xDelayedTaskList1, xDelayedTaskList2, xPendingReadyList是在任务调度的时候,用做保存延迟或者等待的任务列表。
List的定义如下:
/*
* Definition of the type of queue used by the scheduler.
*/
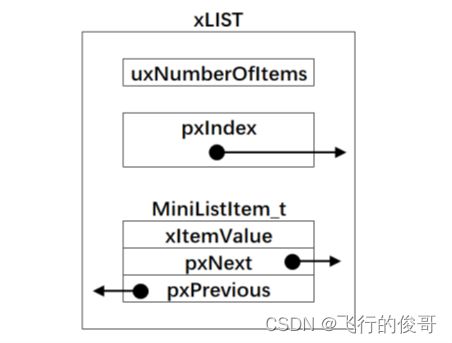
typedef struct xLIST
{
listFIRST_LIST_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
volatile UBaseType_t uxNumberOfItems;
ListItem_t * configLIST_VOLATILE pxIndex; /*< Used to walk through the list. Points to the last item returned by a call to listGET_OWNER_OF_NEXT_ENTRY (). */
MiniListItem_t xListEnd; /*< List item that contains the maximum possible item value meaning it is always at the end of the list and is therefore used as a marker. */
listSECOND_LIST_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
} List_t;
我们来看看如何初始化任务列表的
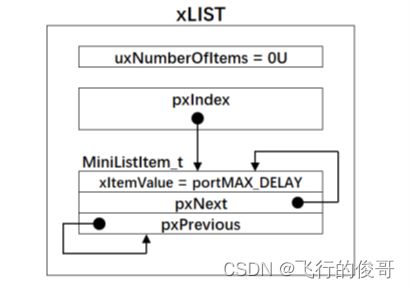
void vListInitialise( List_t * const pxList )
{
/* The list structure contains a list item which is used to mark the
end of the list. To initialise the list the list end is inserted
as the only list entry. */
pxList->pxIndex = ( ListItem_t * ) &( pxList->xListEnd ); /* The mini list structure is used as the list end to save RAM. This is checked and valid. */
/* The list end value is the highest possible value in the list to
ensure it remains at the end of the list. */
pxList->xListEnd.xItemValue = portMAX_DELAY;
/* The list end next and previous pointers point to itself so we know
when the list is empty. */
pxList->xListEnd.pxNext = ( ListItem_t * ) &( pxList->xListEnd ); /*lint !e826 !e740 The mini list structure is used as the list end to save RAM. This is checked and valid. */
pxList->xListEnd.pxPrevious = ( ListItem_t * ) &( pxList->xListEnd );/*lint !e826 !e740 The mini list structure is used as the list end to save RAM. This is checked and valid. */
pxList->uxNumberOfItems = ( UBaseType_t ) 0U;
/* Write known values into the list if
configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
listSET_LIST_INTEGRITY_CHECK_1_VALUE( pxList );
listSET_LIST_INTEGRITY_CHECK_2_VALUE( pxList );
}
==> 如果是不是第一次创建任务, 初始化任务列表(prvInialiseTaskLists()),走进该函数:
/* If the scheduler is not already running, make this task the
current task if it is the highest priority task to be created
so far. */
if( xSchedulerRunning == pdFALSE )
{
if( pxCurrentTCB->uxPriority <= pxNewTCB->uxPriority )
{
pxCurrentTCB = pxNewTCB;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
uxTaskNumber++;
prvAddTaskToReadyList( pxNewTCB );
走进prvAddTaskToReadyList:
/*
* Place the task represented by pxTCB into the appropriate ready list for
* the task. It is inserted at the end of the list.
*/
#define prvAddTaskToReadyList( pxTCB ) \
traceMOVED_TASK_TO_READY_STATE( pxTCB ); \
taskRECORD_READY_PRIORITY( ( pxTCB )->uxPriority ); \
vListInsertEnd( &( pxReadyTasksLists[ ( pxTCB )->uxPriority ] ), &( ( pxTCB )->xStateListItem ) ); \
tracePOST_MOVED_TASK_TO_READY_STATE( pxTCB )
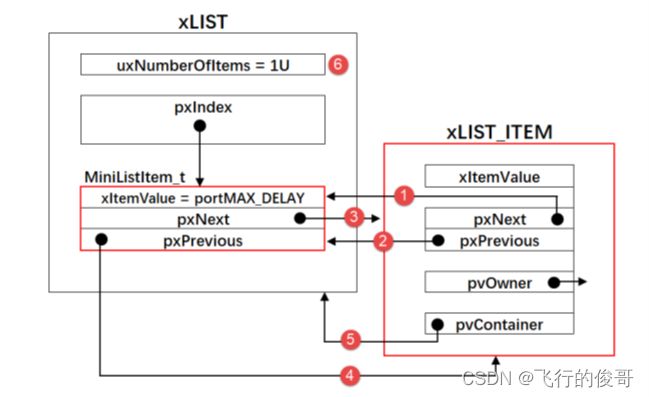
void vListInsertEnd( List_t * const pxList, ListItem_t * const pxNewListItem )
{
ListItem_t * const pxIndex = pxList->pxIndex;
/* Only effective when configASSERT() is also defined, these tests may catch
the list data structures being overwritten in memory. They will not catch
data errors caused by incorrect configuration or use of FreeRTOS. */
listTEST_LIST_INTEGRITY( pxList );
listTEST_LIST_ITEM_INTEGRITY( pxNewListItem );
/* Insert a new list item into pxList, but rather than sort the list,
makes the new list item the last item to be removed by a call to
listGET_OWNER_OF_NEXT_ENTRY(). */
pxNewListItem->pxNext = pxIndex;
pxNewListItem->pxPrevious = pxIndex->pxPrevious;
/* Only used during decision coverage testing. */
mtCOVERAGE_TEST_DELAY();
pxIndex->pxPrevious->pxNext = pxNewListItem;
pxIndex->pxPrevious = pxNewListItem;
/* Remember which list the item is in. */
pxNewListItem->pvContainer = ( void * ) pxList; //就是该任务在哪个优先级的任务列表里 // pxReadyTasksLists[ uxPriority ]
( pxList->uxNumberOfItems )++;
}