基于Simulink的永磁同步电机仿真控制系统
1.研究背景
汽车在全球保有量的不断增加使人类生活面临能源短缺、全球变暖、空气质量水平下降等诸多挑战,同时也推动汽车自身技术的发展,为此汽车工程师正在不断努力研究降低油耗的方法,寻求各种代用燃料以及开发不用或少用汽油的新型车辆;越来越多的人士已经认识到各种类型电动汽车和燃料电池汽车是实现清洁汽车的解决方案,全世界的汽车业界也正在为此努力并投入了巨大的资金和人力。
近年来随着新材料技术的发展,特别是稀土永磁材料,磁性复合材料的出现,加之我国拥有世界上最大的高能量密度永磁材料(钕—铁—硼)的储量,使得永磁电机活跃在各个工业生产中。永磁同步电机(PMSM)是近几年发展起来的一种新型的电机,具有转子转动惯量小、效率高、功率密度大、可靠性高的优点,因此十分适合应用于高性能伺服系统中,例如在数控机床等场合,永磁同步电动机正在逐步取代直流电机和感应电机。同时由于永磁同步电机无需激磁绕组,明显地减小了体积,减轻了重量,降低了损耗,避免了电机发热,从而提高了效率和功率因数,具有明显的节能效果。
2.永磁同步电机模型建立及控制方案
关于永磁同步电机的控制目前主要的是空间矢量控制和直接转矩控制,本次实验决定采用两种方法对电机进行转速环和电流环的控制,由于电机在三相静止坐标系下的模型变量之间耦合严重,不容易进行控制和计算,因此,需要进行坐标变换,将其变换到dq坐标系进行控制。
在实验原理部分,首先建立了永磁同步电机在静止坐标系下的数学模型,然后给出了典型的三相坐标变换公式Clark,Park变换,然后给出dq坐标系下的数学模型。针对控制原理,介绍了空间矢量控制(SVPWM)和直接转矩控制的基本原理。
2.1 三相静止坐标系的模型
(1)磁链方程

式中,ψa、ψb、ψc为三相定子磁链,Laa、Lbb、Lcc为定子电枢绕组的自感,且Laa=Lbb=Lcc;Mab、Mac、Mba、Mbc、Mca、Mcb为定子绕组之间的互感;ψf为转子永磁体的磁链;θ是转子与定子A相绕组的夹角。
(2)定子电压方程

式中,ua、ub、uc为三相定子电压;Rs= Ra = Rb = Rc为定子每相绕组;ia、ib、ic为定子电枢绕组三相电流。
(3)电磁转矩

(4)电机运动方程
![]()
式中,TL为负载转矩,J为电机的转动惯量;B为电机的摩擦系数;K为扭矩系数。
2.2 坐标变换公式
(1)变换原则——功率不变约束条件
设电压方程为:
![]()
电流变换矩阵为,则变换前后电压和电流的关系式为:
![]()
式中,![]() 为坐标变换后的电压与电流。
为坐标变换后的电压与电流。
若坐标变换前后功率不变,有

一般而言,电压坐标变换矩阵与电流坐标变换矩阵相同,即 ,因此,带入式(1.3)可以推出:
,因此,带入式(1.3)可以推出:
![]()
上述变换属于正交变换,且满足了功率不变的约束条件。
(2) 三相静止轴系A-B-C到两相静止轴系αβ的变换(3s/2s变换)
为了便于分析,取三相绕组匝数相等:NA=NB=NC=N3,并取两相绕组匝数也相等: 。空间位置等效图如图1所示。
。空间位置等效图如图1所示。
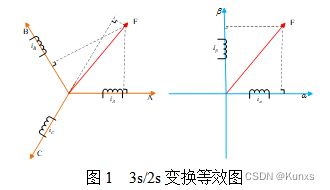
可得到,两相绕组的旋转磁动势与三相绕组的磁动势等效表达式:
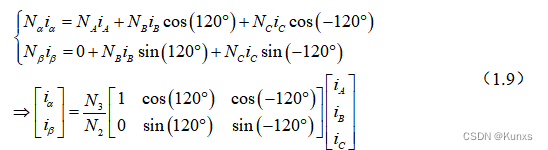
为保证推导的严谨性,在非方阵中引入一个独立变量,称为零轴电流,此时变换矩阵可以改写为:

求解变换矩阵的逆和转置,可以得到:
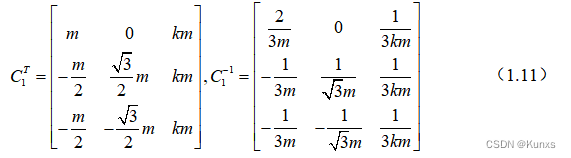
令两者相等,可以得到 ,此时对应的坐标变换为等功率坐标变换,带入整理得到标准的形式,有:
,此时对应的坐标变换为等功率坐标变换,带入整理得到标准的形式,有:

(3)变换原则——幅值不变约束条件
在幅值不变的约束条件下,坐标变换前后的幅值不发生变化,此时,推导的过程比功率不变的简单,有:
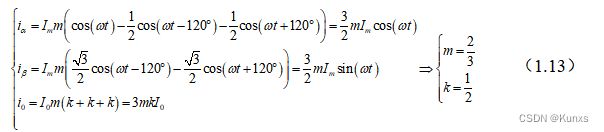
带入整理得到标准的形式,有:

(4)二相静止轴系αβ到二相旋转轴系dq的变换(2s/2r变换)
两个相互垂直的绕组,在两绕组中分别通以直流电流,并且将此固定磁场以同样的角速度旋转,则两相旋转绕组产生的合成磁场也是一个旋转磁场,如图2所示,再进一步使两绕组轴线与三相绕组(或与两相静止绕组的轴线同方向)的旋转磁场方向相同,由此即可用两个直流分量来替代三相交流电。这可进一步简化参变量间的关系。
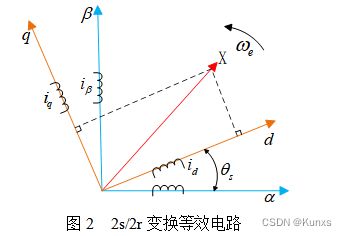
两相静止坐标系与两相旋转坐标系间的夹角为(且随时间变化):![]() 。两相静止轴系与两相旋转轴系的等效磁动势表达式可以得到变换关系,两者绕组匝数相同。
。两相静止轴系与两相旋转轴系的等效磁动势表达式可以得到变换关系,两者绕组匝数相同。

求解变换矩阵的逆和转置,可以得到:

因此,可以得到由静止abc到dq坐标系的坐标变换方程及其逆矩阵。

2.3 dq坐标系下的数学模型
(1)磁链方程

(2)电压方程
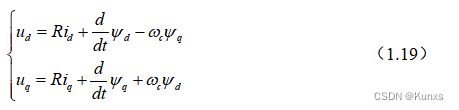
式中,ud、uq分别为定子电压在dq轴的分量;id、iq分别是定子电流在dq轴的分量;R是定子电阻;ψd、ψq是dq轴磁链,ωe是电角速度;Ld、Lq是dq轴电感分量,ψf代表永磁磁链。
(3)转矩方程

2.4 空间矢量控制原理
电压空间矢量控制技术是依据输出电压矢量的空间位置确定逆变器的特殊开关顺序以及开关时间的算法。传统的正弦波脉宽调制技术(SPWM)主要使输出电压接近正弦波而电压空间矢量控制技术(SVPWM)的主要目标是形成圆形旋转磁场。SVPWM在谐波抑制、电压利用率以及数字化控制等方面更具有优势[23],同时,SVPWM便于实现直流注入,因此本文采用SVPWM控制方法。
三相电压在空间的合成矢量us与三相电流在空间的合成矢量is满足电压方程:

当转速比较高时,定子电阻压降比较小,对此进行忽略,式(3.1)可以变形为:

由式(1.22)可知,定子磁链为电压的积分,当电压稳定时,定子磁链的幅值不变。矢量电压随时间旋转,定子磁链也旋转,运动轨迹为圆形,电压超前其90°,沿着磁链的切线方向变化。只要保证三相合成的矢量电压幅值不变且运动轨迹为圆形即可实现圆形磁链的控制。
图3(a)为典型的三相逆变电压电路,V1-V6为功率开关器件,为防止短路,每相的两个开关不可以同时导通,可以定义开关量,相电压可以表示为式(1.23)。
(1) “1”表示上桥臂开,下桥臂关;
(2) “0”表示上桥臂关,下桥臂开。

逆变器一共有8个状态,表示为(SA,SB,SC),各个开关状态下合成的空间矢量电压如图3(b)所示,三相电压在不同开关状态下对应的合成矢量为如表1所示。


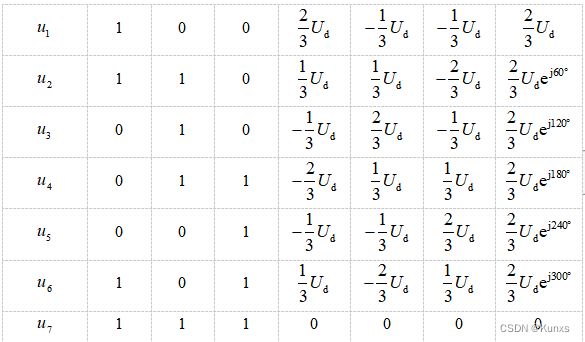
对于表1中的合成矢量电压us,当开关状态(SA,SB,SC)=(1,0,0)时,三相电枢绕组的电压为(uA,uB,uC)=(2/3Ud,-1/3Ud,-1/3Ud),us的计算表达式为:

将三相空间标量合成为一个空间矢量的过程与坐标变换的原理一致,即将三相坐标系下三个坐标轴的数值变换到两相坐标系中,通过两相坐标表示合成矢量,采用等幅值的坐标变换,式(1.24)中的系数2/3,依次类推,可以得到表1的不同开关状态下的合成矢量。
采用以上的控制方法,形成的旋转磁场如图4(a)所示,形成正六边形的旋转磁场,存在很大的谐波分量,会产生转矩与转速的脉动。要获得多边形或接近圆形的旋转磁场,需要有更多的输出电压矢量。可以采用平行四边形合成法则,用相邻有效工作矢量合成期望的输出矢量,以降低谐波分量,使旋转磁场更加接近圆形。由图4(b)可以得到在一个PWM周期内,输出的合成电压矢量可以表示为:

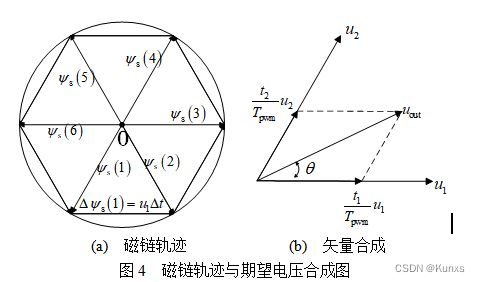
根据正弦定理,可以利用期望输出的电压矢量求得相邻矢量的作用时间:
将式(1.26)扩展到其他扇区,有:

式中,k=1,2,3,4,5,6分别为不同的扇区号。
至此,SVPWM的基本原理分析完毕,通过利用不同扇区的相邻矢量在不同时刻输出期望的空间矢量,可以使旋转磁场接近圆形。
2.6 控制原理图
(1)SVPWM矢量控制原理图
该控制原理图如图5所示,主要采用了转速环和电流环双闭环控制系统,采用空间矢量调制技术控制逆变器的开关信号。通过将给定转速与实际转速进行比较通过转速调节器调节得到q轴电流的给定值,在通过电流调节器调节得到dq轴给定电压值,通过坐标变换,得到αβ轴的给定电压值,通过空间矢量调节模块得到逆变器的开关信号。

3 永磁同步电机控制系统仿真模型建立
3.1 仿真模型搭建
根据图5中的控制原理,可以看出电机模型主要有转速/电流调节器、SVPWM发生器、逆变电路、电机本体模型和坐标变换部分组成,针对这几部分,在Simulink中分别搭建相应的模型。
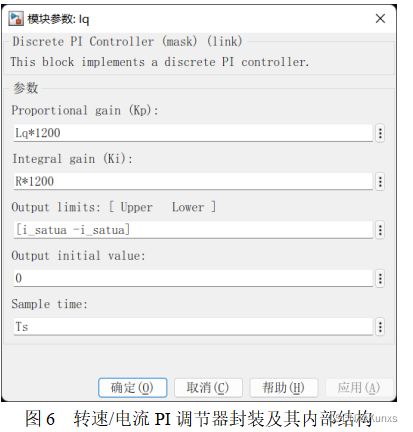
(1) 转速/电流调节器
转速/电流调节器主要是指转速环和电流环PI参数调节部分,这里根据PI函数算法搭建了相应的模块,并对其进行封装,双击改模块可以直接修改模块的参数,如图6所示。

(2)SVPWM发生器
根据SVPWM的实现原理,可以搭建相应的模块,如图7所示。

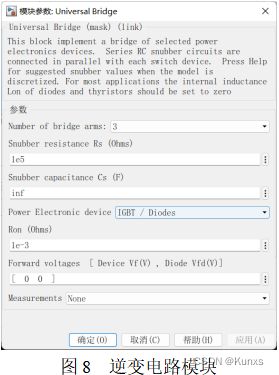
(3)逆变电路
本仿真采用了三相半桥逆变电路,采用了系统自带的“universal Bridge”模块,如图8所示。
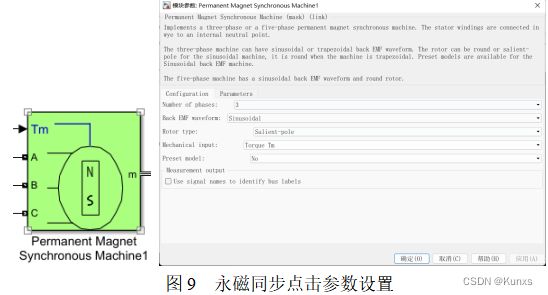
(4)电机本体模型
电机采用了系统的永磁同步电机,具体参数如图9所示。
(5)坐标变换模块
坐标变换主要是进行dq坐标变换的,具体模型如图10所示。

3.2 SVPWM的控制系统仿真模型搭建
根据图5中的控制原理图可以在MATLAB/Simulink中搭建相应的模型,整体的模型如图11所示。
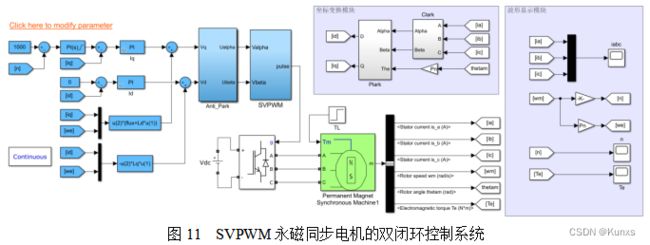
其中,坐标变换模块主要利用坐标变换公式将静止ABC三相电流变换到旋转dq坐标系中;SVPWM模块内部结构如图12所示,主要包含扇区计算模块,相邻矢量作用时间模块以及PWM波形产生模块。

4 永磁同步电机控制系统仿真结果分析
4.1 空间矢量控制系统仿真模型结果分析
(1)PI参数整定
给定转速为1000 r/min,设定仿真时间为0.4s,空载启动,在0.2s时突加10N·m的负载,设定求解器为ode23tb。
对于空间矢量控制系统,需要调节转速环的PI参数以及电流环的dq轴的两个PI参数,根据仿真的转速波形采用试错法进行调节,最终得到当转速环参数:nkp=0.03, nki=2, 饱和限幅nks=30;q轴电流环参数:ikp=Lq×1200, iki=R×1200; d轴电流环参数:ikp=Ld×1200; iki=R×1200;此时可以得到比较好的相应波形。
(2)电流仿真结果
仿真最终得到的电流波形如图14所示,当转矩为0时,输出的电流接近0,加上负载转矩以后,电流仅仅正弦波形。

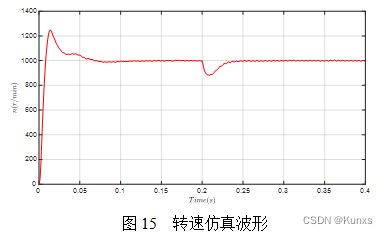
(2)转速仿真结果
仿真最终得到的转速波形如图15所示,转速调节的很快,经过约0.07s左右到达给定转速,当突加负载时,经历了大约0.03s系统恢复稳定状态。
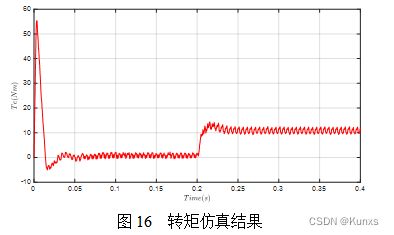
(3)转矩仿真结果
由图16可以看出输出的电磁转矩跟随给定的负载转矩输出,存在一定的转矩脉动。
5 附录
相关参数设置代码:
%电机参数设置
clear;
Ts = 10e-6;
R = 0.6429;
Ld = 13.41e-3;
Lq = 13.41e-3;
Pn = 2;
flux =0.68;
udc=311;
%% PI参数调节
n_p=0.03;
n_i=2;
n_satua=30;
i_p=Lq*1200;
i_i=R*1200;
i_satua=udc*0.9*sqrt(1/3);