【elfboard linux开发板】8. watchdog 和 mpu
1. 用文件IO的方式使用watchdog
a. ioctl 命令说明
需要的头文件
#include
格式:int ioctl(int fd, unsigned long request, …)
fd 必须被打开
第二个参数是一个依赖设备的请求代码
第三个参数是一个无类型的内存指针
返回值:成功为0,失败返回-1,并且设置errno
b. 如果要看头文件中的cat /usr/include/linux/watchdog.h
也可以发送到虚拟机上看
scp /usr/include/linux/watchdog.h [email protected]:/home/liu/Desktop/arm/
c. 相关的宏和函数
WDIOC_SETTIMEOUT _IOWR(WATCHDOG_IOCTL_BASE, 6, int)
WDIOC_KEEPALIVE _IOR(WATCHDOG_IOCTL_BASE, 5, int)
atoi: string to int
d. 需要输入的传参
watchdog文件位置,动作,时间
#include 2. 用文件IO的方式使用MPU
a. 说明
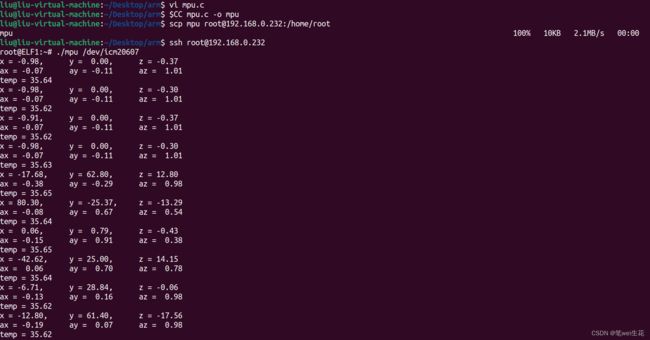
此处不涉及相关驱动(后续待学习),用文件读写的方式读取文件中的陀螺仪、加速度计及温度值;
涉及到分辨率的问题,所以需要转换,假设16位的寄存器,量程位+_2000,其分辨率为: 2 15 / 2000 2^{15}/2000 215/2000
b. 代码
#include c. 结果