新一代FreeSWITCH接电话机器人(基于FreeSWITCH)
一、新一代FreeSWITCH接电话机器人(基于FreeSWITCH)
#(以顶顶通呼叫中心件的新一代FreeSWITCH电话机器人为例)
随着科技的不断发展,机器人技术已经越来越普及。机器人能够像人类一样进行各种操作和任务,而且在很多方面,它们能够做得比人类更好。例如,机器人可以长时间工作而无需休息,还可以在危险或严重环境中工作,这些情况对人类来说是不可承受的。近年来,机器人接听服务越来越受到欢迎,下面,我们将介绍机器人接听的博客文章。
二、机器人概述
机器人接听是指一种自动化服务,用于接收来电并进行语音交互。这种服务利用人工智能和自然语言处理技术,让机器人能够理解和回答客户的问题,提供一种高效、低成本的客户服务解决方案。
2. 机器人接听的优势
机器人接听具有以下优势:
2.1 24小时服务
机器人接听可以实现全天候接听,不受人类工作时间的限制,这样可以更好地满足客户的需求。
2.2 快速响应
机器人接听能够迅速响应客户的需求,不用等待人类工作人员上岗,从而提高了客户体验。
2.3 多任务处理
机器人接听可以同时接收多个电话,并对多个客户提供服务,这可以提高效率和生产力。
2.4 交互性强
机器人接听在语音交互方面具有很高的精度和准确性,能够理解客户的问题,并提供相应的解决方案。而且,它们还可以学习并优化服务水平,提高客户满意度。
3.机器人接听功能作用 应用场景
机器人接听被广泛应用于各种不同的领域,例如:
3.1 银行
银行可以通过机器人接听提供快速、方便的客户服务,例如,查询账户余额、转账、还款等。
3.2 电信公司
电信公司可以通过机器人接听帮助客户解决常见问题,例如,充值、查询账单和解决网络故障等。
3.3 医院
医院可以利用机器人接听提供一些基本服务,例如,预约挂号、查询医生和药品信息等。
4.未来的发展趋势
随着人工智能和自然语言处理技术的不断发展,机器人接听的应用范围将越来越广泛。未来,它们还可以与其他技术相结合,如大数据、云计算、物联网等,为客户提供更多的服务。
电话机器人是一款结合ASR、IVR、NLU等相关技术的结合体,即专为电话营销设计的一款实用工具,通过人工编撰的程序配合人工的录音镶嵌在一起,通过电话线路对外拨号。
首先打开Linux的终端输入下面的指令查看IP地址“一定要记住自己IP地址”

启动FreeSWTICH (注意这里freeSWTICH基于Linux平台)
下载 CCADMIN 程序 http://down.ddrj.com/ccadmin.zip
一、配置机器人
机器人的接听的外呼任务
先根据文档配置新一代FreeSWITCH电话机器人开发接口 | 顶顶通 - 呼叫中心二次开发接口,smartivr,mod_vad,FreeSWITCH,语音识别,呼叫中心中间件,电话机器人,空号检测,智能外呼。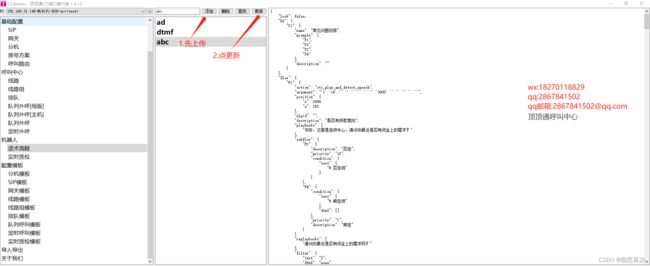
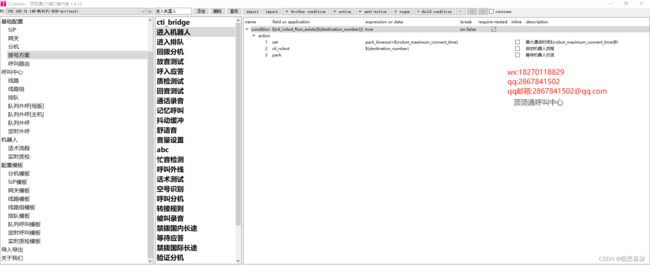
机器人拨号方案
-
执行 json话术引擎
${cti_robot_flow_exists(${destination_number})} 如果${destination_number}指向的话术脚本存在,则执行这个话术脚本。
-
执行http话术接口(顶顶通呼叫中心中间件(mod_cti基于FreeSWITCH)-电话机器人http接口说明 | 顶顶通 - 呼叫中心二次开发接口,smartivr,mod_vad,FreeSWITCH,语音识别,呼叫中心中间件,电话机器人,空号检测,智能外呼。
机器人路由,按顺序执行
- 等待应答
- 通话录音
- 在通话过程播放一个舒适音,这个主要可以防止录音不同步的问题。
- 匹配机器人脚本
- 如果需要执行http话术,也可以启用http话术。

-
创建机器人外呼任务,任务配置修改了需要点更新才能生效。
线路组:外呼使用的线路组
号码队列:获取外呼号码的队列名字
路由条件:电话接通后需要执行的话术名字
呼叫路由:电话接通后执行的呼叫路由
-

-
查看fs内部任务状态,如果任务配置好了,但是不外乎,就需要查看一下任务的状态。注意启用是个三态按键,需要打勾了,才是启用。
执行fs命令
cti show queue_dialer 任务名 - 检查enable是否是true
- 检查call_limit是否大于1
- 检查start_time、stop_time、work_hour、work_weeks是否包含了当前时间
- 检查line_group的idle(可用并发)是否大于0
- 检查number_queue配置的队列里面是否有号码
- cps_last:最近1秒呼叫了多少个号码,call_count:当前通话(包含未接通)的总数

二、总结:
机器人接听是一种高效、低成本的客户服务解决方案,可以帮助企业提高客户满意度和效率。虽然它们目前还存在一些缺陷,例如语音识别不够准确等,但随着技术的进步,这些问题将会被逐步解决。我们相信,机器人接听将成为更多企业客户服务的首选方案。
顶顶通呼叫中心中间件(mod_cti基于FreeSWITCH)-使用指南 | 顶顶通 - 呼叫中心二次开发接口,smartivr,mod_vad,FreeSWITCH,语音识别,呼叫中心中间件,电话机器人,空号检测,智能外呼。