一篇搞懂分布式事务及解决方案
分布式事务
一图解读分布式事务 首先奉上一张全网最为牛逼的图,给大家做个总览:

名词解释
事务:事务是由一组操作构成的可靠的独立的工作单元,事务具备ACID的特性,即原子性、一致性、隔离性和持久性。
本地事务:当事务由资源管理器本地管理时被称作本地事务。本地事务的优点就是支持严格的ACID特性,高效,可靠,状态可以只在资源管理器中维护,而且应用编程模型简单。但是本地事务不具备分布式事务的处理能力,隔离的最小单位受限于资源管理器。
全局事务:当事务由全局事务管理器进行全局管理时成为全局事务,事务管理器负责管理全局的事务状态和参与的资源,协同资源的一致提交回滚。
TX协议:应用或者应用服务器与事务管理器的接口。
XA协议:全局事务管理器与资源管理器的接口。XA是由X/Open组织提出的分布式事务规范。该规范主要定义了全局事务管理器和局部资源管理器之间的接口。主流的数据库产品都实现了XA接口。XA接口是一个双向的系统接口,在事务管理器以及多个资源管理器之间作为通信桥梁。之所以需要XA是因为在分布式系统中从理论上讲两台机器是无法达到一致性状态的,因此引入一个单点进行协调。由全局事务管理器管理和协调的事务可以跨越多个资源和进程。全局事务管理器一般使用XA二阶段协议与数据库进行交互。
AP:应用程序,可以理解为使用DTP(Data Tools Platform)的程序。
RM:资源管理器,这里可以是一个DBMS或者消息服务器管理系统,应用程序通过资源管理器对资源进行控制,资源必须实现XA定义的接口。资源管理器负责控制和管理实际的资源。
TM:事务管理器,负责协调和管理事务,提供给AP编程接口以及管理资源管理器。事务管理器控制着全局事务,管理事务的生命周期,并且协调资源。
两阶段提交协议:XA用于在全局事务中协调多个资源的机制。TM和RM之间采取两阶段提交的方案来解决一致性问题。两节点提交需要一个协调者(TM)来掌控所有参与者(RM)节点的操作结果并且指引这些节点是否需要最终提交。两阶段提交的局限在于协议成本,准备阶段的持久成本,全局事务状态的持久成本,潜在故障点多带来的脆弱性,准备后,提交前的故障引发一系列隔离与恢复难题。
BASE理论:BA指的是基本业务可用性,支持分区失败,S表示柔性状态,也就是允许短时间内不同步,E表示最终一致性,数据最终是一致的,但是实时是不一致的。原子性和持久性必须从根本上保障,为了可用性、性能和服务降级的需要,只有降低一致性和隔离性的要求。
CAP定理:对于共享数据系统,最多只能同时拥有CAP其中的两个,任意两个都有其适应的场景,真是的业务系统中通常是ACID与CAP的混合体。分布式系统中最重要的是满足业务需求,而不是追求高度抽象,绝对的系统特性。C表示一致性,也就是所有用户看到的数据是一样的。A表示可用性,是指总能找到一个可用的数据副本。P表示分区容错性,能够容忍网络中断等故障。
分布式事务与分布式锁的区别: 分布式锁解决的是分布式资源抢占的问题;分布式事务和本地事务是解决流程化提交问题。
事务简介
事务(Transaction)是操作数据库中某个数据项的一个程序执行单元(unit)。
事务应该具有4个属性:原子性、一致性、隔离性、持久性。这四个属性通常称为ACID特性。
事务的四个特征:
1、Atomic原子性 事务必须是一个原子的操作序列单元,事务中包含的各项操作在一次执行过程中,要么全部执行成功,要么全部不执行,任何一项失败,整个事务回滚,只有全部都执行成功,整个事务才算成功。
2、Consistency一致性 事务的执行不能破坏数据库数据的完整性和一致性,事务在执行之前和之后,数据库都必须处于一致性状态。
3、Isolation隔离性 在并发环境中,并发的事务是相互隔离的,一个事务的执行不能被其他事务干扰。即不同的事务并发操纵相同的数据时,每个事务都有各自完整的数据空间,即一个事务内部的操作及使用的数据对其他并发事务是隔离的,并发执行的各个事务之间不能相互干扰。
4、Durability 持久性 当事务提交或回滚后,数据库会持久化的保存数据。 掉电/关机 内存 硬盘上
SQL中的4个事务隔离级别:
(1)读未提交
允许脏读。如果一个事务正在处理某一数据,并对其进行了更新,但同时尚未完成事务,因此事务没有提交,与此同时,允许另一个事务也能够访问该数据。例如A将变量n从0累加到10才提交事务,此时B可能读到n变量从0到10之间的所有中间值。
(2)读已提交
允许不可重复读。只允许读到已经提交的数据。即事务A在将n从0累加到10的过程中,B无法看到n的中间值,之中只能看到10。同时有事务C进行从10到20的累加,此时B在同一个事务内再次读时,读到的是20。
(3)可重复读
允许幻读。保证在事务处理过程中,多次读取同一个数据时,其值都和事务开始时刻时是一致的。禁止脏读、不可重复读。幻读即同样的事务操作,在前后两个时间段内执行对同一个数据项的读取,可能出现不一致的结果。保证B在同一个事务内,多次读取n的值,读到的都是初始值0。幻读,就是不同事务,读到的n的数据可能是0,可能10,可能是20 1
(4)串行化
最严格的事务,要求所有事务被串行执行,不能并发执行。 1 如果不对事务进行并发控制,我们看看数据库并发操作是会有那些异常情形
(1)一类丢失更新:两个事物读同一数据,一个修改字段1,一个修改字段2,后提交的恢复了先提交修改的字段。 (2)二类丢失更新:两个事物读同一数据,都修改同一字段,后提交的覆盖了先提交的修改。 (3)脏读:读到了未提交的值,万一该事物回滚,则产生脏读。 (4)不可重复读:两个查询之间,被另外一个事务修改了数据的内容,产生内容的不一致。 (5)幻读:两个查询之间,被另外一个事务插入或删除了记录,产生结果集的不一致。 4、Durability持久性 持久性(durability):持久性也称永久性(permanence),指一个事务一旦提交,它对数据库中对应数据的状态变更就应该是永久性的。
即使发生系统崩溃或机器宕机,只要数据库能够重新启动,那么一定能够将其恢复到事务成功结束时的状态。
比方说:一个人买东西的时候需要记录在账本上,即使老板忘记了那也有据可查。
事务的四个隔离级别:
未提交读(READ UNCOMMITTED):所有事务都可以看到其他事务未提交的修改。一般很少使用;
提交读(READ COMMITTED):Oracle默认隔离级别,事务之间只能看到彼此已提交的变更修改;
可重复读(REPEATABLE READ):MySQL默认隔离级别,同一事务中的多次查询会看到相同的数据行;可以解决不可重复读,但可能出现幻读;
可串行化(SERIALIZABLE):最高的隔离级别,事务串行的执行,前一个事务执行完,后面的事务会执行。读取每条数据都会加锁,会导致大量的超时和锁争用问题;
什么是分布式事务? 对于分布式系统而言,需要保证分布式系统中的数据一致性,保证数据在子系统中始终保持一致,避免业务出现问题。分布式系统中对数要么一起成功,要么一起失败,必须是一个整体性的事务。
分布式事务指事务的参与者、支持事务的服务器、资源服务器以及事务管理器分别位于不同的分布式系统的不同节点之上。
简单的说,在分布式系统上一次大的操作由不同的小操作组成,这些小的操作分布在不同的服务节点上,且属于不同的应用,分布式事务需要保证这些小操作要么全部成功,要么全部失败。
举个例子:在电商网站中,用户对商品进行下单,需要在订单表中创建一条订单数据,同时需要在库存表中修改当前商品的剩余库存数量,两步操作一个添加,一个修改,我们一定要保证这两步操作一定同时操作成功或失败,否则业务就会出现问题。
任何事务机制在实现时,都应该考虑事务的ACID特性,包括:本地事务、分布式事务。对于分布式事务而言,即使不能都很好的满足,也要考虑支持到什么程度。
典型的分布式事务场景:
-
跨库事务 跨库事务指的是,一个应用某个功能需要操作多个库,不同的库中存储不同的业务数据。笔者见过一个相对比较复杂的业务,一个业务中同时操作了9个库。
下图演示了一个服务同时操作2个库的情况:
-
分库分表 通常一个库数据量比较大或者预期未来的数据量比较大,都会进行水平拆分,也就是分库分表。
如下图,将数据库B拆分成了2个库:
对于分库分表的情况,一般开发人员都会使用一些数据库中间件来降低sql操作的复杂性。
如,对于sql:insert into user(id,name) values (1,“tianshouzhi”),(2,“wangxiaoxiao”)。这条sql是操作单库的语法,单库情况下,可以保证事务的一致性。
但是由于现在进行了分库分表,开发人员希望将1号记录插入分库1,2号记录插入分库2。所以数据库中间件要将其改写为2条sql,分别插入两个不同的分库,此时要保证两个库要不都成功,要不都失败,因此基本上所有的数据库中间件都面临着分布式事务的问题。
-
微服务化 微服务架构是目前一个比较一个比较火的概念。例如上面笔者提到的一个案例,某个应用同时操作了9个库,这样的应用业务逻辑必然非常复杂,对于开发人员是极大的挑战,应该拆分成不同的独立服务,以简化业务逻辑。拆分后,独立服务之间通过RPC框架来进行远程调用,实现彼此的通信。下图演示了一个3个服务之间彼此调用的架构:
Service A完成某个功能需要直接操作数据库,同时需要调用Service B和Service C,而Service B又同时操作了2个数据库,Service C也操作了一个库。需要保证这些跨服务的对多个数据库的操作要不都成功,要不都失败,实际上这可能是最典型的分布式事务场景。
分布式事务实现方案必须要考虑性能的问题,如果为了严格保证ACID特性,导致性能严重下降,那么对于一些要求快速响应的业务,是无法接受的。
CAP定理 分布式事务的理论基础 数据库事务ACID 四大特性,无法满足分布式事务的实际需求,这个时候又有一些新的大牛提出一些新的理论。
CAP定理 CAP定理是由加州大学伯克利分校Eric Brewer教授提出来的,他指出WEB服务无法同时满足一下3个属性:
一致性(Consistency) : 客户端知道一系列的操作都会同时发生(生效) 可用性(Availability) : 每个操作都必须以可预期的响应结束 分区容错性(Partition tolerance) : 即使出现单个组件无法可用,操作依然可以完成 具体地讲在分布式系统中,一个Web应用至多只能同时支持上面的两个属性。因此,设计人员必须在一致性与可用性之间做出选择。
2000年7月Eric Brewer教授仅仅提出来的是一个猜想,2年后,麻省理工学院的Seth Gilbert和Nancy Lynch从理论上证明了CAP理论,并且而一个分布式系统最多只能满足CAP中的2项。之后,CAP理论正式成为分布式计算领域的公认定理。
所以,CAP定理在迄今为止的分布式系统中都是适用的!
CAP的一致性、可用性、分区容错性 具体如下:
1、一致性 数据一致性指“all nodes see the same data at the same time”,即更新操作成功并返回客户端完成后,所有节点在同一时间的数据完全一致,不能存在中间状态。
分布式环境中,一致性是指多个副本之间能否保持一致的特性。在一致性的需求下,当一个系统在数据一致的状态下执行更新操作后,应该保证系统的数据仍然处理一致的状态。
例如对于电商系统用户下单操作,库存减少、用户资金账户扣减、积分增加等操作必须在用户下单操作完成后必须是一致的。不能出现类似于库存已经减少,而用户资金账户尚未扣减,积分也未增加的情况。如果出现了这种情况,那么就认为是不一致的。
数据一致性分为强一致性、弱一致性、最终一致性。
如果的确能像上面描述的那样时刻保证客户端看到的数据都是一致的,那么称之为强一致性。 如果允许存在中间状态,只要求经过一段时间后,数据最终是一致的,则称之为最终一致性。 此外,如果允许存在部分数据不一致,那么就称之为弱一致性。 面试题:什么是数据一致性? 现在知道怎么回答了吧! 1 2、可用性 系统提供的服务必须一直处于可用的状态,对于用户的每一个操作请求总是能够在有限的时间内返回结果。
两个度量的维度:
(1)有限时间内 对于用户的一个操作请求,系统必须能够在指定的时间(响应时间)内返回对应的处理结果,如果超过了这个时间范围,那么系统就被认为是不可用的。即这个响应时间必须在一个合理的值内,不让用户感到失望。
试想,如果一个下单操作,为了保证分布式事务的一致性,需要10分钟才能处理完,那么用户显然是无法忍受的。
(2)返回正常结果 要求系统在完成对用户请求的处理后,返回一个正常的响应结果。正常的响应结果通常能够明确地反映出对请求的处理结果,即成功或失败,而不是一个让用户感到困惑的返回结果。比如返回一个系统错误如OutOfMemory,则认为系统是不可用的。
“返回结果”是可用性的另一个非常重要的指标,它要求系统在完成对用户请求的处理后,返回一个正常的响应结果,不论这个结果是成功还是失败。
3、分区容错性 即分布式系统在遇到任何网络分区故障时,仍然需要能够保证对外提供满足一致性和可用性的服务,除非是整个网络环境都发生了故障。
网络分区,是指分布式系统中,不同的节点分布在不同的子网络(机房/异地网络)中,由于一些特殊的原因导致这些子网络之间出现网络不连通的状态,但各个子网络的内部网络是正常的,从而导致整个系统的网络环境被切分成了若干孤立的区域。组成一个分布式系统的每个节点的加入与退出都可以看做是一个特殊的网络分区。
CAP的应用 1、放弃P 放弃分区容错性的话,则放弃了分布式,放弃了系统的可扩展性
2、放弃A 放弃可用性的话,则在遇到网络分区或其他故障时,受影响的服务需要等待一定的时间,再此期间无法对外提供政策的服务,即不可用
3、放弃C 放弃一致性的话(这里指强一致),则系统无法保证数据保持实时的一致性,在数据达到最终一致性时,有个时间窗口,在时间窗口内,数据是不一致的。
对于分布式系统来说,P是不能放弃的,因此架构师通常是在可用性和一致性之间权衡。
CAP 理论告诉我们: 目前很多大型网站及应用都是分布式部署的,分布式场景中的数据一致性问题一直是一个比较重要的话题。
基于 CAP理论,很多系统在设计之初就要对这三者做出取舍:
任何一个分布式系统都无法同时满足一致性(Consistency)、可用性(Availability)和分区容错性(Partition tolerance),最多只能同时满足两项。在互联网领域的绝大多数的场景中,都需要牺牲强一致性来换取系统的高可用性,系统往往只需要保证最终一致性。
问:为什么分布式系统中无法同时保证一致性和可用性?
答:首先一个前提,对于分布式系统而言,分区容错性是一个最基本的要求,因此基本上我们在设计分布式系统的时候只能从一致性(C)和可用性(A)之间进行取舍。
如果保证了一致性(C):对于节点N1和N2,当往N1里写数据时,N2上的操作必须被暂停,只有当N1同步数据到N2时才能对N2进行读写请求,在N2被暂停操作期间客户端提交的请求会收到失败或超时。显然,这与可用性是相悖的。
如果保证了可用性(A):那就不能暂停N2的读写操作,但同时N1在写数据的话,这就违背了一致性的要求。
CAP 权衡 通过 CAP 理论,我们知道无法同时满足一致性、可用性和分区容错性这三个特性,那要舍弃哪个呢?
对于多数大型互联网应用的场景,主机众多、部署分散,而且现在的集群规模越来越大,所以节点故障、网络故障是常态,而且要保证服务可用性达到 N 个 9,即保证 P 和 A,舍弃C(退而求其次保证最终一致性)。虽然某些地方会影响客户体验,但没达到造成用户流程的严重程度。
对于涉及到钱财这样不能有一丝让步的场景,C 必须保证。网络发生故障宁可停止服务,这是保证 CA,舍弃 P。貌似这几年国内银行业发生了不下 10 起事故,但影响面不大,报道也不多,广大群众知道的少。还有一种是保证 CP,舍弃 A。例如网络故障是只读不写。
CAP和ACID中的A和C是完全不一样的 A的区别: ACID中的A指的是原子性(Atomicity),是指事务被视为一个不可分割的最小工作单元,事务中的所有操作要么全部提交成功,要么全部失败回滚; CAP中的A指的是可用性(Availability),是指集群中一部分节点故障后,集群整体是否还能响应客户端的读写请求; C的区别: ACID一致性是有关数据库规则,数据库总是从一个一致性的状态转换到另外一个一致性的状态; CAP的一致性是分布式多服务器之间复制数据令这些服务器拥有同样的数据,由于网速限制,这种复制在不同的服务器上所消耗的时间是不固定的,集群通过组织客户端查看不同节点上还未同步的数据维持逻辑视图,这是一种分布式领域的一致性概念; 总之:
ACID里的一致性指的是事务执行前后,数据库完整性,而CAP的一致性,指的是分布式节点的数据的一致性。背景不同,无从可比
BASE定理 CAP是分布式系统设计理论,BASE是CAP理论中AP方案的延伸,对于C我们采用的方式和策略就是保证最终一致性;
eBay的架构师Dan Pritchett源于对大规模分布式系统的实践总结,在ACM上发表文章提出BASE理论,BASE理论是对CAP理论的延伸,核心思想是即使无法做到强一致性(StrongConsistency,CAP的一致性就是强一致性),但应用可以采用适合的方式达到最终一致性(Eventual Consitency)。
BASE定理 BASE是Basically Available(基本可用)、Soft state(软状态)和Eventually consistent(最终一致性)三个短语的缩写。BASE基于CAP定理演化而来,核心思想是即时无法做到强一致性,但每个应用都可以根据自身业务特点,采用适当的方式来使系统达到最终一致性。
1、Basically Available(基本可用) 基本可用是指分布式系统在出现不可预知的故障的时候,允许损失部分可用性,但不等于系统不可用。 1 (1)响应时间上的损失
当出现故障时,响应时间增加 1 (2)功能上的损失
当流量高峰期时,屏蔽一些功能的使用以保证系统稳定性(服务降级) 1 2、Soft state(软状态) 指允许系统中的数据存在中间状态,并认为该中间状态的存在不会影响系统的整体可用性。
与硬状态相对,即是指允许系统中的数据存在中间状态,并认为该中间状态的存在不会影响系统的整体可用性,即允许系统在不同节点的数据副本之间进行数据同步的过程存在延时。
3、Eventually consistent(最终一致性) 强调系统中所有的数据副本,在经过一段时间的同步后,最终能够达到一个一致的状态。其本质是需要系统保证最终数据能够达到一致,而不需要实时保证系统数据的强一致性。
最终一致性可分为如下几种: (1)因果一致性(Causal consistency) 即进程A在更新完数据后通知进程B,那么之后进程B对该项数据的范围都是进程A更新后的最新值。 (2)读己之所写(Read your writes) 进程A更新一项数据后,它自己总是能访问到自己更新过的最新值。 (3)会话一致性(Session consistency) 将数据一致性框定在会话当中,在一个会话当中实现读己之所写的一致性。即执行更新后,客户端在同一个会话中始终能读到该项数据的最新值 (4)单调读一致性(Monotonic read consistency) 如果一个进程从系统中读取出一个数据项的某个值后,那么系统对于该进程后续的任何数据访问都不应该返回更旧的值。 (5)单调写一致性(Monotoic write consistency)
一个系统需要保证来自同一个进程的写操作被顺序执行。 BASE理论是提出通过牺牲一致性来获得可用性,并允许数据在一段时间内是不一致的,但最终达到一致状态。
BASE理论的特点: BASE理论面向的是大型高可用可扩展的分布式系统,和传统的事物ACID特性是相反的。
它完全不同于ACID的强一致性模型,而是通过牺牲强一致性来获得可用性,并允许数据在一段时间内是不一致的,但最终达到一致状态。
但同时,在实际的分布式场景中,不同业务单元和组件对数据一致性的要求是不同的,因此在具体的分布式系统架构设计过程中,ACID特性和BASE理论往往又会结合在一起。
BASE理论与CAP的关系 BASE理论是对CAP中一致性和可用性权衡的结果,其来源于对大规模互联网系统分布式实践的总结, 是基于CAP定理逐步演化而来的。BASE理论的核心思想是:即使无法做到强一致性,但每个应用都可以根据自身业务特点,采用适当的方式来使系统达到最终一致性。
BASE理论其实就是对CAP理论的延伸和补充,主要是对AP的补充。牺牲数据的强一致性,来保证数据的可用性,虽然存在中间装填,但数据最终一致。
ACID 和 BASE 的区别与联系 ACID 是传统数据库常用的设计理念,追求强一致性模型。BASE 支持的是大型分布式系统,提出通过牺牲强一致性获得高可用性。
ACID 和 BASE 代表了两种截然相反的设计哲学,在分布式系统设计的场景中,系统组件对一致性要求是不同的,因此 ACID 和 BASE 又会结合使用。
分布式事务分类:柔性事务和刚性事务 分布式场景下,多个服务同时对服务一个流程,比如电商下单场景,需要支付服务进行支付、库存服务扣减库存、订单服务进行订单生成、物流服务更新物流信息等。如果某一个服务执行失败,或者网络不通引起的请求丢失,那么整个系统可能出现数据不一致的原因。
上述场景就是分布式一致性问题,追根到底,分布式一致性的根本原因在于数据的分布式操作,引起的本地事务无法保障数据的原子性引起。
分布式一致性问题的解决思路有两种,一种是分布式事务,一种是尽量通过业务流程避免分布式事务。分布式事务是直接解决问题,而业务规避其实通过解决出问题的地方(解决提问题的人)。其实在真实业务场景中,如果业务规避不是很麻烦的前提,最优雅的解决方案就是业务规避。
分布式事务分类 分布式事务实现方案从类型上去分刚性事务、柔型事务:
刚性事务满足CAP的CP理论
柔性事务满足BASE理论(基本可用,最终一致)
刚性事务 刚性事务:通常无业务改造,强一致性,原生支持回滚/隔离性,低并发,适合短事务。
原则:刚性事务满足足CAP的CP理论
刚性事务指的是,要使分布式事务,达到像本地式事务一样,具备数据强一致性,从CAP来看,就是说,要达到CP状态。
刚性事务:XA 协议(2PC、JTA、JTS)、3PC,但由于同步阻塞,处理效率低,不适合大型网站分布式场景。
柔性事务 柔性事务指的是,不要求强一致性,而是要求最终一致性,允许有中间状态,也就是Base理论,换句话说,就是AP状态。
与刚性事务相比,柔性事务的特点为:有业务改造,最终一致性,实现补偿接口,实现资源锁定接口,高并发,适合长事务。
柔性事务分为:
补偿型 异步确保型 最大努力通知型。 柔型事务:TCC/FMT、Saga(状态机模式、Aop模式)、本地事务消息、消息事务(半消息)
分布式事务六种解决方案
前言
事务想必大家并不陌生,至于什么是 ACID,也是老生常谈了。不过暖男为了保证文章的完整性确保所有人都听得懂,我还是得先说说 ACID,然后再来介绍下什么是分布式事务和常见的分布式事务包括 2PC、3PC、TCC、本地消息表、消息事务、最大努力通知。
事务
严格意义上的事务实现应该是具备原子性、一致性、隔离性和持久性,简称 ACID。
-
原子性(Atomicity),可以理解为一个事务内的所有操作要么都执行,要么都不执行。
-
一致性(Consistency),可以理解为数据是满足完整性约束的,也就是不会存在中间状态的数据,比如你账上有400,我账上有100,你给我打200块,此时你账上的钱应该是200,我账上的钱应该是300,不会存在我账上钱加了,你账上钱没扣的中间状态。
-
隔离性(Isolation),指的是多个事务并发执行的时候不会互相干扰,即一个事务内部的数据对于其他事务来说是隔离的。
-
持久性(Durability),指的是一个事务完成了之后数据就被永远保存下来,之后的其他操作或故障都不会对事务的结果产生影响。
而通俗意义上事务就是为了使得一些更新操作要么都成功,要么都失败。
说到这里可能有人会说,不对啊 Redis 的事务不能保证所有操作要么都执行要么都不执行,为什么它也叫事务啊?
首先你要知晓一般的中间件都会夸大其效果,人家团队也是想更出名,吸引更多的人来使用他们的产品,所以我们得以辩证的角度来看待。
一般而言他们既然敢说出他们实现了什么什么,要么是真的实现了,要么是在某种特殊、定制或者极端的条件下才能满足功能。
我们来看看 Redis 怎么说的。
![]()
这句话就是告诉大家事务中的某个命令失败了,之后的命令还是会被处理,Redis 不会停止命令,意味着也不会回滚。
你说这不是扯嘛?这都偏离事务最核心的本意了啊。
别急,咱们来看看 Redis 怎么解释的。

Redis 官网解释了为什么不支持回滚,他们说首先如果命令出错那都是语法使用错误,是你们自己编程出错,而且这种情况应该在开发的时候就被检测出来,不应在生产环境中出现。
然后 Redis 就是为了快!不需要提供回滚。
下面还有一段话我就不截图了,就是说就算提供回滚也没用,你这代码都写错了,回滚并不能使你免于编程错误。而且一般这种错也不可能进入到生产环境,所以选择更加简单、快速的方法,我们不支持回滚。
你看看这说的好像很有道理,我们不提供回滚,因为我们不需要为你的编程错误买单!
但好像哪里不对劲?角度、立场不同,大家自己品。
就下来就开始分布式事务。
分布式事务
分布式事务顾名思义就是要在分布式系统中实现事务,它其实是由多个本地事务组合而成。
对于分布式事务而言几乎满足不了 ACID,其实对于单机事务而言大部分情况下也没有满足 ACID,不然怎么会有四种隔离级别呢?所以更别说分布在不同数据库或者不同应用上的分布式事务了。
我们先来看下 2PC。
2PC
2PC(Two-phase commit protocol),中文叫二阶段提交。 二阶段提交是一种强一致性设计,2PC 引入一个事务协调者的角色来协调管理各参与者(也可称之为各本地资源)的提交和回滚,二阶段分别指的是准备(投票)和提交两个阶段。
注意这只是协议或者说是理论指导,只阐述了大方向,具体落地还是有会有差异的。
让我们来看下两个阶段的具体流程。
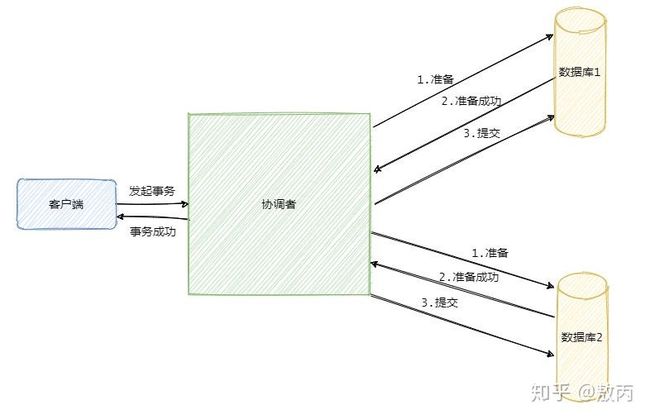
准备阶段协调者会给各参与者发送准备命令,你可以把准备命令理解成除了提交事务之外啥事都做完了。
同步等待所有资源的响应之后就进入第二阶段即提交阶段(注意提交阶段不一定是提交事务,也可能是回滚事务)。
假如在第一阶段所有参与者都返回准备成功,那么协调者则向所有参与者发送提交事务命令,然后等待所有事务都提交成功之后,返回事务执行成功。
让我们来看一下流程图。
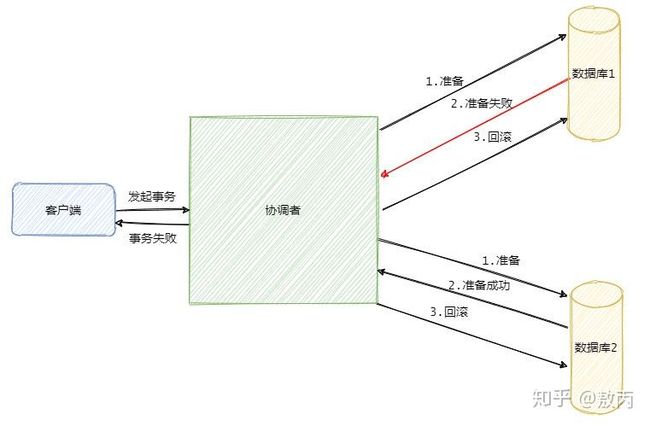
假如在第一阶段有一个参与者返回失败,那么协调者就会向所有参与者发送回滚事务的请求,即分布式事务执行失败。
那可能就有人问了,那第二阶段提交失败的话呢?
这里有两种情况。
第一种是第二阶段执行的是回滚事务操作,那么答案是不断重试,直到所有参与者都回滚了,不然那些在第一阶段准备成功的参与者会一直阻塞着。
第二种是第二阶段执行的是提交事务操作,那么答案也是不断重试,因为有可能一些参与者的事务已经提交成功了,这个时候只有一条路,就是头铁往前冲,不断的重试,直到提交成功,到最后真的不行只能人工介入处理。
大体上二阶段提交的流程就是这样,我们再来看看细节。
首先 2PC 是一个同步阻塞协议,像第一阶段协调者会等待所有参与者响应才会进行下一步操作,当然第一阶段的协调者有超时机制,假设因为网络原因没有收到某参与者的响应或某参与者挂了,那么超时后就会判断事务失败,向所有参与者发送回滚命令。
在第二阶段协调者的没法超时,因为按照我们上面分析只能不断重试!
协调者故障分析
协调者是一个单点,存在单点故障问题。
假设协调者在发送准备命令之前挂了,还行等于事务还没开始。
假设协调者在发送准备命令之后挂了,这就不太行了,有些参与者等于都执行了处于事务资源锁定的状态。不仅事务执行不下去,还会因为锁定了一些公共资源而阻塞系统其它操作。
假设协调者在发送回滚事务命令之前挂了,那么事务也是执行不下去,且在第一阶段那些准备成功参与者都阻塞着。
假设协调者在发送回滚事务命令之后挂了,这个还行,至少命令发出去了,很大的概率都会回滚成功,资源都会释放。但是如果出现网络分区问题,某些参与者将因为收不到命令而阻塞着。
假设协调者在发送提交事务命令之前挂了,这个不行,傻了!这下是所有资源都阻塞着。
假设协调者在发送提交事务命令之后挂了,这个还行,也是至少命令发出去了,很大概率都会提交成功,然后释放资源,但是如果出现网络分区问题某些参与者将因为收不到命令而阻塞着。

协调者故障,通过选举得到新协调者
因为协调者单点问题,因此我们可以通过选举等操作选出一个新协调者来顶替。
如果处于第一阶段,其实影响不大都回滚好了,在第一阶段事务肯定还没提交。
如果处于第二阶段,假设参与者都没挂,此时新协调者可以向所有参与者确认它们自身情况来推断下一步的操作。
假设有个别参与者挂了!这就有点僵硬了,比如协调者发送了回滚命令,此时第一个参与者收到了并执行,然后协调者和第一个参与者都挂了。
此时其他参与者都没收到请求,然后新协调者来了,它询问其他参与者都说OK,但它不知道挂了的那个参与者到底O不OK,所以它傻了。
问题其实就出在每个参与者自身的状态只有自己和协调者知道,因此新协调者无法通过在场的参与者的状态推断出挂了的参与者是什么情况。
虽然协议上没说,不过在实现的时候我们可以灵活的让协调者将自己发过的请求在哪个地方记一下,也就是日志记录,这样新协调者来的时候不就知道此时该不该发了?

但是就算协调者知道自己该发提交请求,那么在参与者也一起挂了的情况下没用,因为你不知道参与者在挂之前有没有提交事务。
如果参与者在挂之前事务提交成功,新协调者确定存活着的参与者都没问题,那肯定得向其他参与者发送提交事务命令才能保证数据一致。
如果参与者在挂之前事务还未提交成功,参与者恢复了之后数据是回滚的,此时协调者必须是向其他参与者发送回滚事务命令才能保持事务的一致。
所以说极端情况下还是无法避免数据不一致问题。
talk is cheap 让我们再来看下代码,可能更加的清晰。以下代码取自 <>。
这个代码就是实现了 2PC,但是相比于2PC增加了写日志的动作、参与者之间还会互相通知、参与者也实现了超时。这里要注意,一般所说的2PC,不含上述功能,这都是实现的时候添加的。
协调者:
write START_2PC to local log; //开始事务
multicast VOTE_REQUEST to all participants; //广播通知参与者投票
while not all votes have been collected {
wait for any incoming vote;
if timeout { //协调者超时
write GLOBAL_ABORT to local log; //写日志
multicast GLOBAL_ABORT to all participants; //通知事务中断
exit;
}
record vote;
}
//如果所有参与者都ok
if all participants sent VOTE_COMMIT and coordinator votes COMMIT {
write GLOBAL_COMMIT to local log;
multicast GLOBAL_COMMIT to all participants;
} else {
write GLOBAL_ABORT to local log;
multicast GLOBAL_ABORT to all participants;
}
参与者:
write INIT to local log; //写日志
wait for VOTE_REQUEST from coordinator;
if timeout { //等待超时
write VOTE_ABORT to local log;
exit;
}
if participant votes COMMIT {
write VOTE_COMMIT to local log; //记录自己的决策
send VOTE_COMMIT to coordinator;
wait for DECISION from coordinator;
if timeout {
multicast DECISION_REQUEST to other participants; //超时通知
wait until DECISION is received; /* remain blocked*/
write DECISION to local log;
}
if DECISION == GLOBAL_COMMIT
write GLOBAL_COMMIT to local log;
else if DECISION == GLOBAL_ABORT
write GLOBAL_ABORT to local log;
} else {
write VOTE_ABORT to local log;
send VOTE_ABORT to coordinator;
}
每个参与者维护一个线程处理其它参与者的DECISION_REQUEST请求:
while true {
wait until any incoming DECISION_REQUEST is received;
read most recently recorded STATE from the local log;
if STATE == GLOBAL_COMMIT
send GLOBAL_COMMIT to requesting participant;
else if STATE == INIT or STATE == GLOBAL_ABORT;
send GLOBAL_ABORT to requesting participant;
else
skip; /* participant remains blocked */
}
至此我们已经详细的分析的 2PC 的各种细节,我们来总结一下!
2PC 是一种尽量保证强一致性的分布式事务,因此它是同步阻塞的,而同步阻塞就导致长久的资源锁定问题,总体而言效率低,并且存在单点故障问题,在极端条件下存在数据不一致的风险。
当然具体的实现可以变形,而且 2PC 也有变种,例如 Tree 2PC、Dynamic 2PC。
还有一点不知道你们看出来没,2PC 适用于数据库层面的分布式事务场景,而我们业务需求有时候不仅仅关乎数据库,也有可能是上传一张图片或者发送一条短信。
而且像 Java 中的 JTA 只能解决一个应用下多数据库的分布式事务问题,跨服务了就不能用了。
简单说下 Java 中 JTA,它是基于XA规范实现的事务接口,这里的 XA 你可以简单理解为基于数据库的 XA 规范来实现的 2PC。(至于XA规范到底是啥,篇幅有限,下次有机会再说)
接下来我们再来看看 3PC。
3PC
3PC 的出现是为了解决 2PC 的一些问题,相比于 2PC 它在参与者中也引入了超时机制,并且新增了一个阶段使得参与者可以利用这一个阶段统一各自的状态。
让我们来详细看一下。
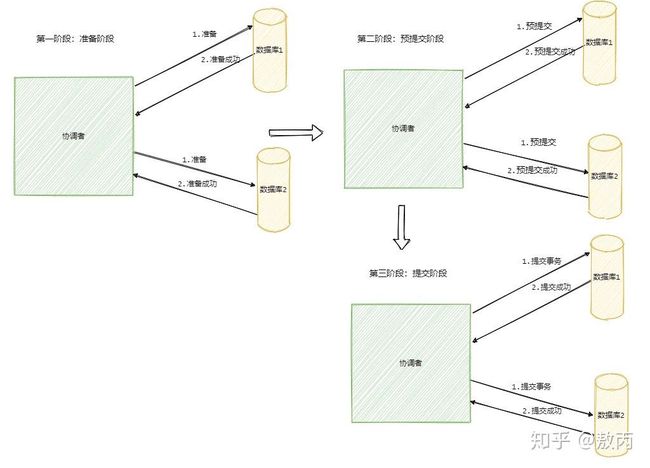
3PC 包含了三个阶段,分别是准备阶段、预提交阶段和提交阶段,对应的英文就是:CanCommit、PreCommit 和 DoCommit。
看起来是把 2PC 的提交阶段变成了预提交阶段和提交阶段,但是 3PC 的准备阶段协调者只是询问参与者的自身状况,比如你现在还好吗?负载重不重?这类的。
而预提交阶段就是和 2PC 的准备阶段一样,除了事务的提交该做的都做了。
提交阶段和 2PC 的一样,让我们来看一下图。
不管哪一个阶段有参与者返回失败都会宣布事务失败,这和 2PC 是一样的(当然到最后的提交阶段和 2PC 一样只要是提交请求就只能不断重试)。
我们先来看一下 3PC 的阶段变更有什么影响。
首先准备阶段的变更成不会直接执行事务,而是会先去询问此时的参与者是否有条件接这个事务,因此不会一来就干活直接锁资源,使得在某些资源不可用的情况下所有参与者都阻塞着。
而预提交阶段的引入起到了一个统一状态的作用,它像一道栅栏,表明在预提交阶段前所有参与者其实还未都回应,在预处理阶段表明所有参与者都已经回应了。
假如你是一位参与者,你知道自己进入了预提交状态那你就可以推断出来其他参与者也都进入了预提交状态。
但是多引入一个阶段也多一个交互,因此性能会差一些,而且绝大部分的情况下资源应该都是可用的,这样等于每次明知可用执行还得询问一次。
我们再来看下参与者超时能带来什么样的影响。
我们知道 2PC 是同步阻塞的,上面我们已经分析了协调者挂在了提交请求还未发出去的时候是最伤的,所有参与者都已经锁定资源并且阻塞等待着。
那么引入了超时机制,参与者就不会傻等了,如果是等待提交命令超时,那么参与者就会提交事务了,因为都到了这一阶段了大概率是提交的,如果是等待预提交命令超时,那该干啥就干啥了,反正本来啥也没干。
然而超时机制也会带来数据不一致的问题,比如在等待提交命令时候超时了,参与者默认执行的是提交事务操作,但是有可能执行的是回滚操作,这样一来数据就不一致了。
当然 3PC 协调者超时还是在的,具体不分析了和 2PC 是一样的。
从维基百科上看,3PC 的引入是为了解决提交阶段 2PC 协调者和某参与者都挂了之后新选举的协调者不知道当前应该提交还是回滚的问题。
新协调者来的时候发现有一个参与者处于预提交或者提交阶段,那么表明已经经过了所有参与者的确认了,所以此时执行的就是提交命令。
所以说 3PC 就是通过引入预提交阶段来使得参与者之间的状态得到统一,也就是留了一个阶段让大家同步一下。
但是这也只能让协调者知道该如果做,但不能保证这样做一定对,这其实和上面 2PC 分析一致,因为挂了的参与者到底有没有执行事务无法断定。
所以说 3PC 通过预提交阶段可以减少故障恢复时候的复杂性,但是不能保证数据一致,除非挂了的那个参与者恢复。
让我们总结一下, 3PC 相对于 2PC 做了一定的改进:引入了参与者超时机制,并且增加了预提交阶段使得故障恢复之后协调者的决策复杂度降低,但整体的交互过程更长了,性能有所下降,并且还是会存在数据不一致问题。
所以 2PC 和 3PC 都不能保证数据100%一致,因此一般都需要有定时扫描补偿机制。
我再说下 3PC 我没有找到具体的实现,所以我认为 3PC 只是纯的理论上的东西,而且可以看到相比于 2PC 它是做了一些努力但是效果甚微,所以只做了解即可。
TCC
2PC 和 3PC 都是数据库层面的,而 TCC 是业务层面的分布式事务,就像我前面说的分布式事务不仅仅包括数据库的操作,还包括发送短信等,这时候 TCC 就派上用场了!
TCC 指的是Try - Confirm - Cancel。
-
Try 指的是预留,即资源的预留和锁定,注意是预留。
-
Confirm 指的是确认操作,这一步其实就是真正的执行了。
-
Cancel 指的是撤销操作,可以理解为把预留阶段的动作撤销了。
其实从思想上看和 2PC 差不多,都是先试探性的执行,如果都可以那就真正的执行,如果不行就回滚。
比如说一个事务要执行A、B、C三个操作,那么先对三个操作执行预留动作。如果都预留成功了那么就执行确认操作,如果有一个预留失败那就都执行撤销动作。
我们来看下流程,TCC模型还有个事务管理者的角色,用来记录TCC全局事务状态并提交或者回滚事务。
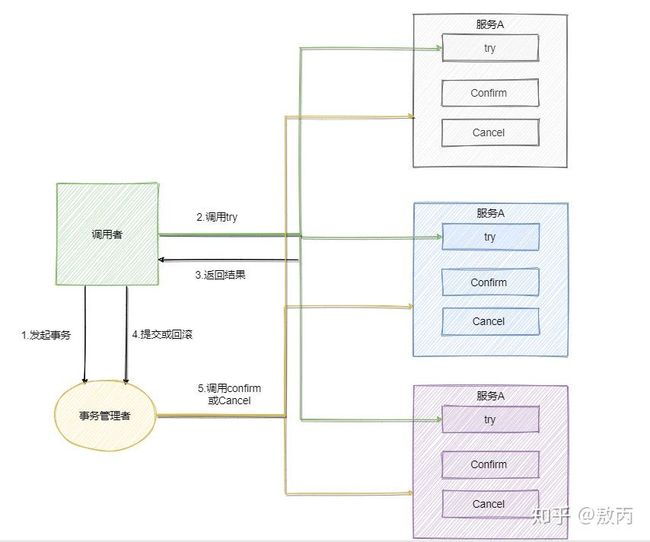
可以看到流程还是很简单的,难点在于业务上的定义,对于每一个操作你都需要定义三个动作分别对应Try - Confirm - Cancel。
因此 TCC 对业务的侵入较大和业务紧耦合,需要根据特定的场景和业务逻辑来设计相应的操作。
还有一点要注意,撤销和确认操作的执行可能需要重试,因此还需要保证操作的幂等。
相对于 2PC、3PC ,TCC 适用的范围更大,但是开发量也更大,毕竟都在业务上实现,而且有时候你会发现这三个方法还真不好写。不过也因为是在业务上实现的,所以TCC可以跨数据库、跨不同的业务系统来实现事务。
本地消息表
本地消息表其实就是利用了 各系统本地的事务来实现分布式事务。
本地消息表顾名思义就是会有一张存放本地消息的表,一般都是放在数据库中,然后在执行业务的时候 将业务的执行和将消息放入消息表中的操作放在同一个事务中,这样就能保证消息放入本地表中业务肯定是执行成功的。
然后再去调用下一个操作,如果下一个操作调用成功了好说,消息表的消息状态可以直接改成已成功。
如果调用失败也没事,会有 后台任务定时去读取本地消息表,筛选出还未成功的消息再调用对应的服务,服务更新成功了再变更消息的状态。
这时候有可能消息对应的操作不成功,因此也需要重试,重试就得保证对应服务的方法是幂等的,而且一般重试会有最大次数,超过最大次数可以记录下报警让人工处理。
可以看到本地消息表其实实现的是最终一致性,容忍了数据暂时不一致的情况。
消息事务
RocketMQ 就很好的支持了消息事务,让我们来看一下如何通过消息实现事务。
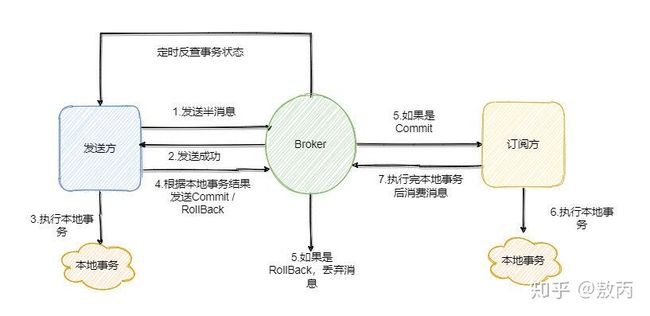
第一步先给 Broker 发送事务消息即半消息,半消息不是说一半消息,而是这个消息对消费者来说不可见,然后发送成功后发送方再执行本地事务。
再根据本地事务的结果向 Broker 发送 Commit 或者 RollBack 命令。
并且 RocketMQ 的发送方会提供一个反查事务状态接口,如果一段时间内半消息没有收到任何操作请求,那么 Broker 会通过反查接口得知发送方事务是否执行成功,然后执行 Commit 或者 RollBack 命令。
如果是 Commit 那么订阅方就能收到这条消息,然后再做对应的操作,做完了之后再消费这条消息即可。
如果是 RollBack 那么订阅方收不到这条消息,等于事务就没执行过。
可以看到通过 RocketMQ 还是比较容易实现的,RocketMQ 提供了事务消息的功能,我们只需要定义好事务反查接口即可。
可以看到消息事务实现的也是最终一致性。
最大努力通知
其实我觉得本地消息表也可以算最大努力,事务消息也可以算最大努力。
就本地消息表来说会有后台任务定时去查看未完成的消息,然后去调用对应的服务,当一个消息多次调用都失败的时候可以记录下然后引入人工,或者直接舍弃。这其实算是最大努力了。
事务消息也是一样,当半消息被commit了之后确实就是普通消息了,如果订阅者一直不消费或者消费不了则会一直重试,到最后进入死信队列。其实这也算最大努力。
所以最大努力通知其实只是表明了一种柔性事务的思想:我已经尽力我最大的努力想达成事务的最终一致了。
适用于对时间不敏感的业务,例如短信通知。
总结
可以看出 2PC 和 3PC 是一种强一致性事务,不过还是有数据不一致,阻塞等风险,而且只能用在数据库层面。
而 TCC 是一种补偿性事务思想,适用的范围更广,在业务层面实现,因此对业务的侵入性较大,每一个操作都需要实现对应的三个方法。
本地消息、事务消息和最大努力通知其实都是最终一致性事务,因此适用于一些对时间不敏感的业务。