JAKA+aruco+realsense+眼在手外的手眼标定
参考文章
具体步骤
1.跑通机械臂
(机械臂的运行节点商家一般会给,注意看使用说明里面的信息,容易踩雷)
//在工作空间source一下
source devel/setup.bash
//运行自己的机器人节点(自己的啊!!!)
roslaunch jaka_ros_driver start.launch
2.查看消息
用户使用说明里面会告诉你表示机器人位姿的(我的是toolpoint,这里有个大雷,后面说)
rostopic list

3.查看消息类型和内容的指令
//查询话题类型,话题名字记得改哦
rostopic info /robot_driver/tool_point
//查询话题内容
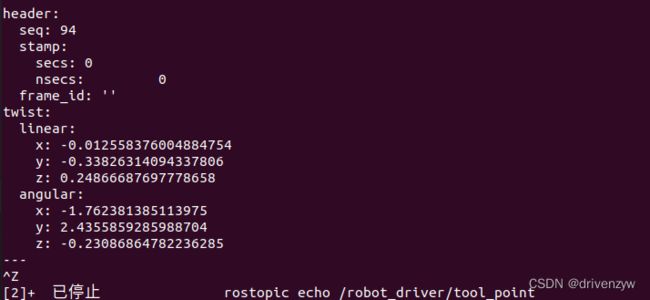
rostopic echo /robot_driver/tool_point
4. 下载鱼香ROS老师酱的手眼标定程序
(老师的驱动我用不了,就略过了,只是用aruco和calibrate两部分,眼在手外和手上的都能用,老师的是手上,我自己的是手外)
基于ROS的手眼标定程序解决方案|支持眼在手外/上_ros手眼标定_鱼香ROS的博客-CSDN博客大家好,我是小鱼。今天分享一个自己写的开源程序,欢迎大家围观~1.概览如果教程对你有帮助,可以start一下~若需手眼标定小鱼付费-指导请添加微信:AiIotRobot本程序支持眼在手上和眼在手外两种标定方式包含基础标定程序包,提供多组机器臂工具坐标和Marker坐标即可完成标定本程序在ros kinetic melodic noetic平台测试通过本程序包通过输入两组以上的机械臂姿态信息和相机所识别的标志物的姿态信息,经过程序计算可输出,机械臂末端和相机之间(或机械臂基座和相机)的坐https://blog.csdn.net/qq_27865227/article/details/120976841在工作空间的src文件下打开终端,clone代码:
git clone https://gitee.com/ohhuo/handeye-calib.git
5.更改aruco里面的launch文件
第一个是realsense驱动的相机,第二个是USB相机,我使用的是第一个,USB的就参考鱼香ROS老师的例子

修改了第8~9行代码,aruco生成的网站:
Online ArUco markers generator
选择original(必选)!!!!id 582,size 50mm(自选)下面的代码的单位是m

6.更改标定文件

眼在手外选第二个,眼在手上选第一个。改了第5行,机器人位姿话题名称(前面有介绍)

7.回到工作空间
catkin_make8.依次运行
source develop/setup.bash
//打开机器人的驱动
roslaunch jaka_ros_driver start.launch
source develop/setup.bash
//打开相机
roslaunch handeye-calib aruco_start_realsense_sdk.launch
source develop/setup.bash
//打开标定程序
roslaunch handeye-calib online_hand_to_eye_calib.launch
9.不断调整位姿获取数据来计算(我明天再来看标定的结果有没有问题)
遇到的亿点点困难
1.部分报错

pip install transforms3d
(缺什么就pip install)
2.获取不到机械臂的位姿信息
可以被识别的aruco信息

不能被识别的机器人位姿信息
去查找一下信息格式,看看报错

可以看到,计算需要的消息格式是geometry_msg/PointStamped,但是机器人传递的消息格式是geometry_msg/TwistStamped
ROS中geometry_msgs常用消息类型_马微微?!的博客-CSDN博客ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373
有两种消息的描述:
geometry_msg/PoseStamped:
std_msgs/Header header
geometry_msgs/Pose pose
geometry_msg/TwistStamped:
std_msgs/Header header
geometry_msgs/Twist twist
表示带有时间戳和参考坐标系的速度(这里说的是速度,我感觉有点问题)
于是我查询了JAKA机器人中对于TwistStamped的定义

很明显,这个消息类型是错的,需要进行修改(乌语子),先去看看是哪个程序发布的话题,用info,这里是我已经改好了的,所以是PoseStamped。找到发布者程序connect_robot。

 先复制一份再去更改。
先复制一份再去更改。
code .添加头文件
#include "geometry_msgs/PoseStamped.h"找到对应的位置更改代码ctrl+f,参考文章:
Quaternion.CreateFromYawPitchRoll(Single, Single, Single) 方法 (System.Numerics) | Microsoft Learn从给定的绕 Y 轴旋转、绕 X 轴旋转和绕 Z 轴旋转创建新四元数。 https://learn.microsoft.com/zh-CN/dotnet/api/system.numerics.quaternion.createfromyawpitchroll?view=net-5.0人ROS中geometry_msgs常用消息类型_马微微?!的博客-CSDN博客ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373
https://learn.microsoft.com/zh-CN/dotnet/api/system.numerics.quaternion.createfromyawpitchroll?view=net-5.0人ROS中geometry_msgs常用消息类型_马微微?!的博客-CSDN博客ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373ROS中geometry_msgs消息类型https://blog.csdn.net/weixin_44978295/article/details/123773373
计算出来了(我更正一下,我之前的博文那个四元数转换是错误的,有误导到大家抱歉,我后面用python写的没有用c++写了,忘记更改了,大家可以看我python四元数转换的博文,我下面的这个标定结果也是不对的,可以看到他的标定结果误差很大,正常的情况应该是像鱼香ros那样,标定的结果误差很小。但是思路就是三部分,发机器人位姿消息,发位姿识别消息以及程序标定。)