无线感知论文阅读笔记 | TRS 2023, DeepEgo: Deep Instantaneous Ego-Motion Estimation Using Automotive Radar
原文链接:https://mp.weixin.qq.com/s?__biz=Mzg4MjgxMjgyMg==&mid=2247486296&idx=1&sn=593f29ee45f66782e90b247b635696d1&chksm=cf51b9a1f82630b7c6ac427f98bb03c18015b6b1865fec22a8c2465768c6fdf463a5c81ef305#rd
TRS 2023 | DeepEgo: Deep Instantaneous Ego-Motion Estimation Using Automotive Radar
无线感知论文阅读笔记 | TRS 2023, DeepEgo: Deep Instantaneous Ego-Motion Estimation Using Automotive Radar
Abstract
-
目标
- Study ego-motion estimation with mm-wave radar
-
Propose DeepEgo for robust and accurate estimation
- 使用神经网络从点云中提取特征
- 应用加权最小二乘进行运动估计
- 新的损失函数:提出多普勒损失定位内点
-
Experiments
- Test on real-world automotive radar dataset
- Show improvements in accuracy, stability and runtime
1 Introduction
-
背景
-
高级驾驶系统(ADS)需要实时的自我运动估计
-
传统方法(如IMU、车轮编码器和GPS)存在诸多问题 ⇒ \Rightarrow ⇒ 采用其他传感器技术(如摄像头、激光雷达、合成孔径声纳、扫描雷达或汽车雷达)进行自我运动估计
-
汽车雷达具有一定优势
✅ 如适应各种天气和照明条件、对线视遮挡的敏感性较低、轻量化、低成本和紧凑
❌ 尽管汽车雷达具有潜在优势,但仍存在挑战,如较少的几何特征、假正例、漏检、雷达截面波动、多路径反射和互干扰等。
-
-
本文:DeepEgo
-
基于神经网络的端到端自我运动估计解决方案,避免了具有挑战性的数据关联任务
-
提出了一种混合方法:
神经网络学习如何加权雷达点云中的每个点
加权最小二乘法(WLS)用于计算最终的估计结果
-
提出了一种新颖的损失函数: 多普勒损失
多普勒损失可以帮助网络自动定位雷达点云中的“内点”,而无需手动标注 ⇒ \Rightarrow ⇒ important to WLS
-
实验
使用具有挑战性的真实汽车雷达数据集RadarScenes, 与6个baselines比较
Improves accuracy by over 50%
-
-
章节安排
- section 2: related work
- section 3: design details of the proposed method
- section 4: performance of the proposed method
- section 5: ablation study
- section 6: conclusions and future studies
2 RELATED WORKS
-
使用汽车雷达进行自我运动估计
- ICP and NDT are early iterative matching methods, but have limitations
- Kellner et al. propose single-frame estimation method based on radial velocity profile
- But Kellner method has difficulty in parameter tuning and cannot fully utilize other radar information
-
点云深度学习
- Image projection methods destroy point cloud structure
- Voxel-based methods have high computational and memory costs
- Point-based methods like PointNet can directly process high-dim sparse radar point clouds
- This paper:
✅ believe point-based methods are more suitable for preserving precise geometry, processing automotive radar data
3 METHODOLOGY
A. Problem Statement
-
本文考虑多维雷达点云 P t , n J × M P^{J×M}_{t,n} Pt,nJ×M
- t t t 雷达扫描的时间戳
- n n n 雷达索引
- J J J 检测到的点的数量
- M M M 点云中每个点的特征数量
-
车辆运动状态: e c = [ v x c , v y c , ω c ] e_c = [v^c_x, v^c_y, \omega^c] ec=[vxc,vyc,ωc]
-
2D坐标系的原点位于车辆质心处,x轴方向与车辆的距离方向运动一致,y轴方向与车辆的横向运动一致
- v x c v^c_x vxc 距离方向速度
- v y c v^c_y vyc 横向速度
- ω c \omega^c ωc 旋转速度
- c c c 测试车辆
-
-
汽车雷达
- n n n个
- 安装位置 [ x n c , y n c , θ n c ] [x^c_n, y^c_n, \theta^c_n] [xnc,ync,θnc]
- 其中 x n c x^c_n xnc 到x轴距离
- y n c y^c_n ync 到y轴的距离
- θ n c \theta^c_n θnc 相对于车辆x轴的安装角度
雷达测量的是它自身与检测对象之间的相对运动 ⇒ \Rightarrow ⇒ 可将车辆坐标系中的自我运动转换到雷达坐标系
- 坐标转换
-
对于雷达坐标系,通常假设x轴方向与雷达的视线方向一致
-
雷达 n n n的2D运动状态: e n = [ v x n , v y n , ω n ] e_n = [v^n_x, v^n_y, \omega^n] en=[vxn,vyn,ωn]
✅ v x n v^n_x vxn 距离方向速度
✅ v y n v^n_y vyn 横向速度
✅ ω n \omega^n ωn 旋转速度
-
ω n = ω c \omega_n = \omega_c ωn=ωc: 刚体上的所有点经历相同的角速度
-
因此, 运动状态 e c e_c ec和 e n e_n en之间的转换可以表示为:
-
[ v x n v y n ω n ] = [ cos ( θ n c ) sin ( θ n c ) 0 − sin ( θ n c ) cos ( θ n c ) 0 0 0 1 ] [ 1 0 − y n c 0 1 x n c 0 0 1 ] [ v x c v y c ω c ] 等式 1 \left[\begin{array}{c}v_x^{\mathbf{n}} \\ v_y^{\mathbf{n}} \\ \omega^{\mathbf{n}}\end{array}\right]=\left[\begin{array}{ccc}\cos \left(\theta_{\mathbf{n}}^c\right) & \sin \left(\theta_{\mathbf{n}}^c\right) & 0 \\ -\sin \left(\theta_{\mathbf{n}}^c\right) & \cos \left(\theta_{\mathbf{n}}^c\right) & 0 \\ 0 & 0 & 1\end{array}\right]\left[\begin{array}{ccc}1 & 0 & -y_n^c \\ 0 & 1 & x_n^c \\ 0 & 0 & 1\end{array}\right]\left[\begin{array}{c}v_x^{\mathbf{c}} \\ v_y^{\mathbf{c}} \\ \omega^{\mathbf{c}}\end{array}\right] 等式1 vxnvynωn = cos(θnc)−sin(θnc)0sin(θnc)cos(θnc)0001 100010−yncxnc1 vxcvycωc 等式1
可见:如果可以估计雷达的运动状态,则可以获得车辆的自身运动
-
雷达运动状态估计 :利用检测到的静止物体的测量径向速度和到达角信息来实现
- 给定雷达点云 P t , n J × M P^{J×M}_{t,n} Pt,nJ×M
- M ≥ 2 M \geq 2 M≥2: 包含径向速度和到达角测量
- 点云中第 j j j个检测点 p j p_j pj的径向速度和到达角: p j = [ d j n , α j n ] p_j = [d^n_j, \alpha^n_j] pj=[djn,αjn],单位为{m/s,弧度}
- 假设所有 J J J个检测点都来自静止物体,则雷达运动状态与径向速度测量之间的关系可以表示为: [ d 1 n d 2 n ⋮ d J n ] = − [ cos ( α 1 n ) sin ( α 1 n ) cos ( α 2 n ) sin ( α 2 n ) ⋮ ⋮ cos ( α J n ) sin ( α J n ) ] [ v x n v y n ] \left[\begin{array}{c}d_1^{\mathbf{n}} \\ d_2^{\mathbf{n}} \\ \vdots \\ d_J^{\mathbf{n}}\end{array}\right]=-\left[\begin{array}{cc}\cos \left(\alpha_1^n\right) & \sin \left(\alpha_1^n\right) \\ \cos \left(\alpha_2^n\right) & \sin \left(\alpha_2^n\right) \\ \vdots & \vdots \\ \cos \left(\alpha_J^n\right) & \sin \left(\alpha_J^n\right)\end{array}\right]\left[\begin{array}{c}v_x^{\mathbf{n}} \\ v_y^{\mathbf{n}}\end{array}\right] d1nd2n⋮dJn =− cos(α1n)cos(α2n)⋮cos(αJn)sin(α1n)sin(α2n)⋮sin(αJn) [vxnvyn]
- 所有径向速度测量的向量表示为 D D D,径向速度投影矩阵的负表示为 A A A, v x n v^n_x vxn和 v y n v^n_y vyn的向量表示为 V V V ⇒ \Rightarrow ⇒ D = A ⋅ V D=A \cdot V D=A⋅V
-
结论:
-
1 给定至少两个独立的检测点( J ≥ 2 J \geq 2 J≥2),可以使用标准回归方法(如最小二乘法)来估计 v x n v^n_x vxn和 v y n v^n_y vyn:
✅ V e s t = ( A T A ) − 1 A T D V_{est} = (A^T A)^{-1} A^T D Vest=(ATA)−1ATD
❌ 最小二乘法对异常值非常敏感
❌ radar PCD中异常值常见
-
2 假设 v y c = 0 v^c_y = 0 vyc=0 (无横向运动),已知 v x n v^n_x vxn和 v y n v^n_y vyn的估计以及雷达位置 [ x n c , y n c , θ n c ] [x^c_n, y^c_n, \theta^c_n] [xnc,ync,θnc],根据等式1可以计算出车辆的自身运动:
✅ v x c = v x n cos ( θ n c ) − v y n sin ( θ n c ) + ω c y n c ω c = v y n cos ( θ n c ) + v x n sin ( θ n c ) x n c \begin{aligned} v_x^{\mathbf{c}} & =v_x^{\mathbf{n}} \cos \left(\theta_{\mathbf{n}}^c\right)-v_y^{\mathbf{n}} \sin \left(\theta_{\mathbf{n}}^c\right)+\omega^{\mathbf{c}} y_{\mathbf{n}}^c \\ \omega^{\mathbf{c}} & =\frac{v_y^{\mathbf{n}} \cos \left(\theta_{\mathbf{n}}^c\right)+v_x^{\mathbf{n}} \sin \left(\theta_{\mathbf{n}}^c\right)}{x_{\mathbf{n}}^c}\end{aligned} vxcωc=vxncos(θnc)−vynsin(θnc)+ωcync=xncvyncos(θnc)+vxnsin(θnc)
-
要解决的问题:如何尽可能准确地估计 v x n v^n_x vxn和 v y n v^n_y vyn + 考虑雷达点云中存在的异常值。
-
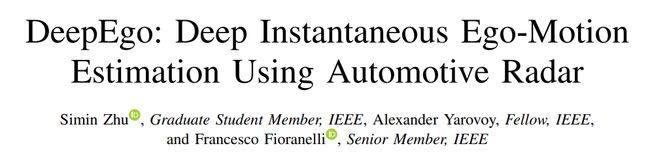
B System Architecture
-
系统架构
- 输入: 由雷达点云组成的多维张量 P t , n J × M P^{J×M}_{t,n} Pt,nJ×M
- DeepEgo:使用神经网络从雷达点云提取特征, 预测点间权重和偏移
- 基于WLS + 网络输出 估计运动
- 输出: 运动状态
-
DeepEgo网络结构
- 使用shared-MLP编码点云特征
- 混合局部和全局特征以提高预测准确度
- 分别预测点间权重和偏移
点间权重的意义:直接缩小异常值造成的大的拟合误差
点间偏移的意义:进一步减小 “远处”异常值引起的误差
C Loss function
-
损失函数
- 包含运动损失、多普勒损失和样本权重
- 运动损失衡量估计运动和真实运动的误差
- 多普勒损失利用真实运动指导网络学习点的权重
- 样本权重降低“坏”训练样本的影响
-
运动损失:
-
L o s s M o t i o n = 1 B ∑ b = 1 B ∥ V g t b − V e s t b ∥ 2 Loss_{Motion} = \frac{1}{B}\sum_{b=1}^{B}\|V_{gt}^b - V_{est}^b\|^2 LossMotion=B1∑b=1B∥Vgtb−Vestb∥2
-
仅使用运动损失进行训练的一个直接后果:
✅ 模型倾向于在少数几个点(异常值)上过拟合,而忽略许多内点
-
-
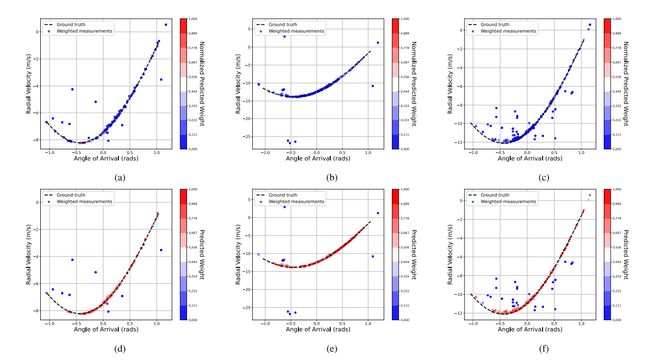
多普勒损失
- 计算预期和测量径向速度之间的差异
- 假设差异符合均值为零的高斯分布
- 检测点为内点的点间似然度: W g t = 1 σ 2 π ⋅ exp ( − ( D e r r − 0 ) 2 2 σ 2 ) W_{gt} = \frac{1}{\sigma\sqrt{2\pi}} \cdot \exp(-\frac{(D_{err}-0)^2}{2\sigma^2}) Wgt=σ2π1⋅exp(−2σ2(Derr−0)2)
- 使用MSE指标计算多普勒损失: L o s s D o p p l e r = 1 B ∑ b = 1 B ∥ W g t b − W e s t b ∥ 2 Loss_{Doppler} = \frac{1}{B}\sum_{b=1}^{B}\|W_{gt}^b - W_{est}^b\|^2 LossDoppler=B1∑b=1B∥Wgtb−Westb∥2
❌ 前提假设: 即所有检测到的静止物体的径向速度测量都遵循等式2
✅ 为了减轻“坏”训练样本的影响,本文提出了样本权重对每个训练数据进行单独加权
-
样本权重
- 对每个训练样本进行单独加权
- 赋予更高权重给更多内点的样本
- 样本权重 S S S是点间似然度 W g t W_{gt} Wgt的总和: S = { s 1 , . . . s B } = { ∑ j = 1 J ( W g t 1 , j ) , . . . , ∑ j = 1 J ( W g t B , j ) } S = \{s_1,...s_B\} = \{ \sum_{j=1}^{J}(W_{gt}^{1,j}),...,\sum_{j=1}^{J}(W_{gt}^{B,j}) \} S={s1,...sB}={∑j=1J(Wgt1,j),...,∑j=1J(WgtB,j)}
-
总loss
- L o s s a l l = ( L o s s M o t i o n + μ ⋅ L o s s D o p p l e r ) ⋅ S Loss_{all} = (Loss_{Motion} + \mu \cdot Loss_{Doppler}) \cdot S Lossall=(LossMotion+μ⋅LossDoppler)⋅S
D Implementation Details
-
Shared MLP
- 用于点云特征编码和解码
- 包含多层全连接神经网络和批标准化
- 使用ReLU激活函数
-
Data processing
- 重采样到固定数量的点
- 删除点数太少的点云
- 归一化特征(径向速度和到达角除外)
-
Network training
- Use mini-batch gradient descent and RMSProp
- 20% data for validation
- Stop when validation loss stops decreasing
-
Multiple radars
- Each radar needs separately trained network copy
4. RESULTS AND DISCUSSIO
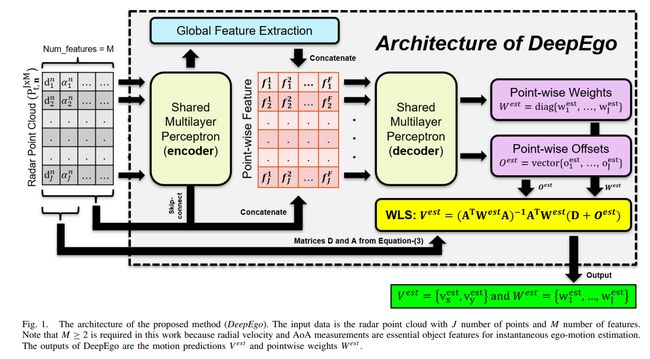
A Radar Dataset
-
雷达数据集
- 使用RadarScenes真实世界数据集
- 包含4个汽车雷达在各种场景下的记录
- 选择车辆行驶距离超过500米的序列
-
数据统计
- 选择64个数据序列
- 总行驶距离超过79公里
- 输入特征为4维(到达角、速度、距离、返回功率)
B. Evaluation Metrics
-
评估指标
- APE计算估计值和真实值之间的姿态RMSE
- 分别指示平移和旋转误差
- RTE计算轨迹段终点距离的均方, 反映方法的长期漂移稳定性
-
APE
- 直接指示测试方法的估计准确度
- 无法反映漂移效应,大误差可能被掩盖
-
RTE
- 将轨迹分段后计算段间终点距离
- 分析测试方法在预定距离上的漂移稳定性
C. Selected Methods for Comparison
-
Compared methods
- Biber:第一个NDT方法
- Kellner:基于AoA-速度轮廓的即时方法
- Rapp:改进的NDT方法
- Lu:基于深度学习的雷达配准
- Heller:将NDT扩展到3D极坐标
- Kung:用于汽车雷达的NDT流水线
-
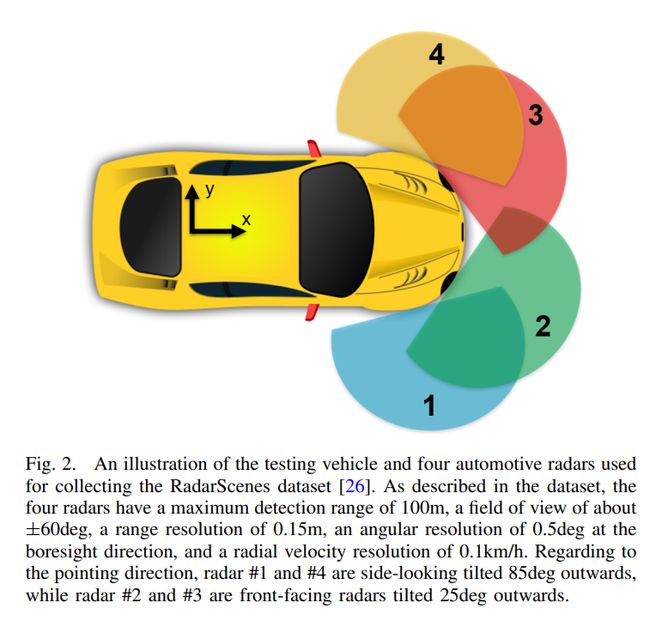
most competitive NDT method
- 比较4种NDT方法的分数函数
- Rapp的方法更可能收敛到全局最优
- 因此选择Rapp作为最具竞争力的NDT方法
D. Results of Comparison With SOTA Methods
-
用于比较的五个场景
- 覆盖了各种天气、交通和道路类型条件
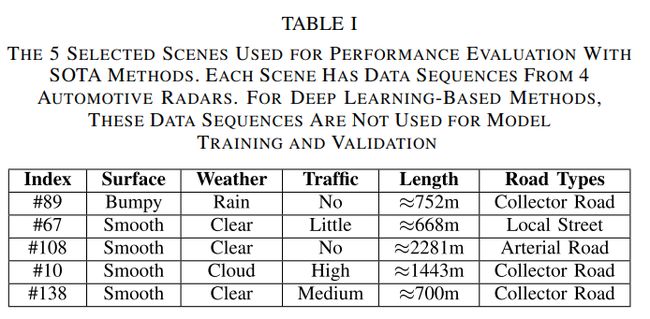
- 覆盖了各种天气、交通和道路类型条件
-
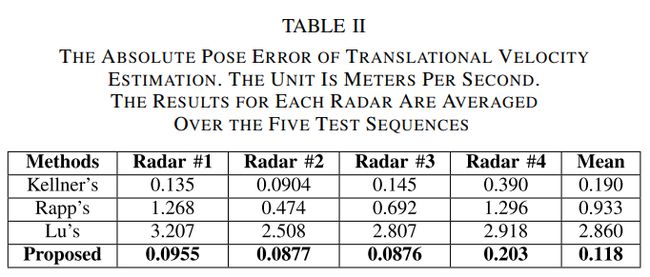
Translation velocity estimation
- Lu方法表现最差
- Kellner方法最准
- 所提方法优于Kellner 37.9%
-
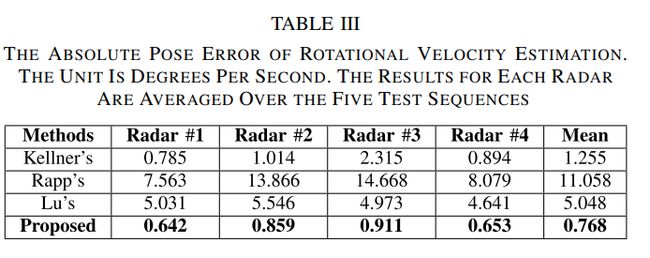
Rotation velocity estimation
- 侧视雷达更敏感
- 所提方法优于最新状态 38.8%
-
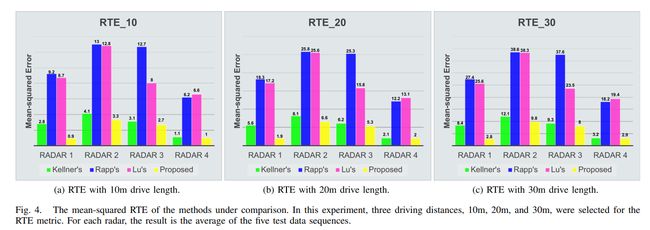
Long-term stability
- RTE评估不同距离
- 所提方法RTE最低
- Kellner方法也较好
-
Runtime
- Rapp方法最慢,需要优化
- Lu方法快但网络大
- 所提方法最快,无需迭代
-
Visualized trajectories
- Lu和Rapp方法较大漂移
- Kellner方法较好
- 所提出方法最好,特别是侧视雷达
E. Further Results on All Data
-
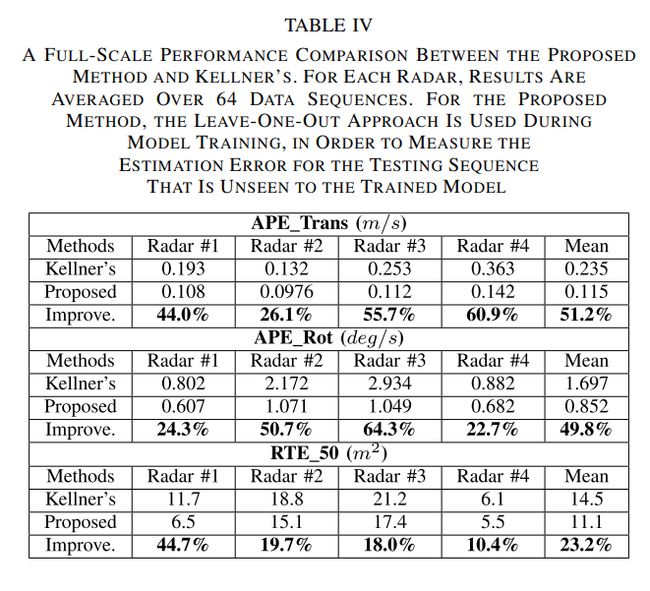
全数据集结果
- 使用64个序列,超过79公里
- 与Kellner方法比较
- 所提方法所有指标明显优于Kellner
-
误差分析
- 绘制估计误差分布直方图
- 直行时误差集中在旋转速度接近零区
- 所提方法高速和快速转弯时误差较小
✅ 这对行车安全更重要
5. ABLATION STUDY
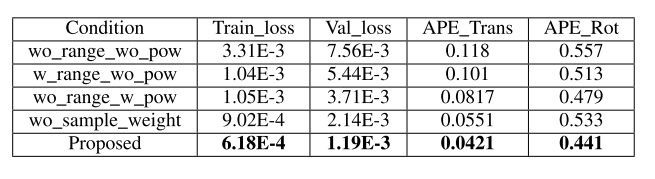
A. Ablation Study on Input Features
- 加权训练数据提高性能
- 避免模型仅依赖几个关键点
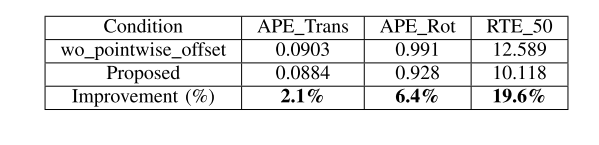
B. Effect of Pointwise Offset
- 减少离群点的影响
- 改善估计精度和长期稳定性
C. Effect of Doppler Loss
- 指导网络关注正确的测量
- 使用更多测量增强鲁棒性
- 权重可帮助其他应用
6 CONCLUSION
-
Summary of paper
-
Propose DeepEgo for radar ego-motion estimation
✅ Hybrid architecture: NN feature extraction + WLS estimation
✅ Can directly process multi-dim point clouds, end-to-end trainable
✅ Provides pointwise weights associated with motion
-
Outperforms others on real dataset
-
-
Future work
- Currently considers single sensor
- Could explore sensor fusion
- Could improve robustness to different installations