几种最小二乘法及python代码:ELS、TLS、RLS
1.ARMAX模型
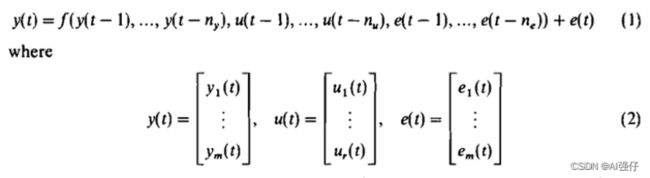
下面各章节,我就是使用上面公式的符号,其中y是输出,u是输入,e是噪声。有m个输出y,r个输入u。
进一步精简为:
Y=Pθ+E
其中:Y为要预测的部分,P为已知数据(包括y的t-1前数据,u的t-1前数据等),E是噪声。
参见:
1)线性模型:AR、MA、ARMA、ARMAX、ARX、ARARMAX、OE、BJ等:
https://blog.csdn.net/zephyr_wang/article/details/128589032
2)正交最小二乘法求解NARMAX:
https://blog.csdn.net/zephyr_wang/article/details/128667425
2.增广最小二乘法Extended Least Squares method
当噪声均值为0时,最小二乘法参数估计算法为无偏估计,为了解决最小二乘法参数估计的有偏性,将噪声模型的辨识同时考虑进去,就是增广最小二乘法。
所以ELSM方法主要关注ARMAX噪声E的影响,方法如下:
1)首先用普通二乘法求解ARMAX模型(不考虑噪声E)参数θ;
2)然后用θ和输入P计算出预测y_hat;
3)然后求残差,y_hat减实际y。这个残差有点等于噪声E。
4)然后将残差和P拼接在一起,继续求解ARMAX(有了残差,即考虑噪声e)参数θ。循环执行第2-4步。
迭代的停止条件可以有两种:
1)参数θ不再变化或者变化微小
2)残差(噪音E)不再变化或者变化微小
python代码如下:
#psi : The information matrix of the model.
e = y[max_lag:, ] - np.dot(psi, theta)#支持多输出
#e = y[max_lag:, 0].reshape(-1, 1) - np.dot(psi, theta)
for i in range(30):#为什么循环30次呢?
#e = np.concatenate([np.zeros([max_lag, 1]), e], axis=0)
e = np.concatenate([np.zeros([max_lag, y.shape[1]]), e], axis=0)#支持多输出
lagged_data = self.build_output_matrix(e, elag)
e_regressors = self.basis_function.fit(
lagged_data, max_lag, predefined_regressors=None
)
psi_extended = np.concatenate([psi, e_regressors], axis=1)
unbiased_theta = getattr(self, self.estimator)(psi_extended, y)
# e = y[max_lag:, 0].reshape(-1, 1) - np.dot(
# psi_extended, unbiased_theta.reshape(-1, 1)
# )
#支持多输出
e = y[max_lag:, ] - np.dot(
psi_extended, unbiased_theta
)
#return unbiased_theta[0 : theta.shape[0], 0].reshape(-1, 1)
return unbiased_theta[0: theta.shape[0]] #支持多输出
可以参见知乎的文章:https://zhuanlan.zhihu.com/p/87996248
3.总体最小二乘法Total Least Squares method
在最小二乘方法中,系数矩阵P被认为是不含有误差的。然而在实际情况中,系数矩阵中的变量往往也包含观测值,因此不可避免地会被误差污染。为同时考虑系数矩阵P和观测向量Y中的误差,提出了总体最小二乘法。
Y=Pθ+E变为Y+ΔY=(P+ΔP)θ
奇异值可以求解最小二乘法,即奇异值总体最小二乘法(singular value decomposition total least squares,SVDTLS)。python代码如下:
#psi : The information matrix of the model.
y = y[self.max_lag :, 0].reshape(-1, 1)
full = np.hstack((psi, y))
n = psi.shape[1]
u, s, v = np.linalg.svd(full, full_matrices=True)
theta = -v.T[:n, n:] / v.T[n:, n:]
return theta.reshape(-1, 1)
4.递归最小二乘法Recursive Least Squares method
递推最小二乘法:当矩阵维数增加时,矩阵求逆运算计算量过大,而且不适合在线辨识。为了减少计算量,并且可以实时地辨识出动态系统的特性,可以将最小二乘法转换成参数递推的估计。
限定记忆的最小二乘法(Fixed Memory Least Squares Method) 总是使用最近N组观测数据,每次估计时,当添入一组新的观测数据时,就丢弃一组最老的数据。因此,也叫做加矩形窗的最小二乘法。这种算法更适合于时变系统和克服数据饱和。
python代码如下:
#psi : The information matrix of the model.
y, n_theta, n, theta, self.xi = self._initial_values(y, psi)
p = np.eye(n_theta) / self._delta
for i in range(2, n):
psi_tmp = psi[i, :].reshape(-1, 1)
k_numerator = self._lam ** (-1) * p.dot(psi_tmp)
k_denominator = 1 + self._lam ** (-1) * psi_tmp.T.dot(p).dot(psi_tmp)
k = np.divide(k_numerator, k_denominator)
self.xi[i, 0] = y[i, 0] - np.dot(psi_tmp.T, theta[:, i - 1])
theta[:, i] = list(theta[:, i - 1].reshape(-1, 1) + k.dot(self.xi[i, 0]))
p1 = p.dot(psi[i, :].reshape(-1, 1)).dot(psi[i, :].reshape(-1, 1).T).dot(p)
p2 = (
psi[i, :].reshape(-1, 1).T.dot(p).dot(psi[i, :].reshape(-1, 1))
+ self._lam
)
p_numerator = p - np.divide(p1, p2)
p = np.divide(p_numerator, self._lam)
self.theta_evolution = theta.copy()
return theta[:, -1].reshape(-1, 1)
代码主要来源于SysIdentPy:
SysIdentPy is an open-source Python module for System Identification using NARMAX models built on top of numpy and is distributed under the 3-Clause BSD license. SysIdentPy provides an easy-to-use and flexible framework for building Dynamical Nonlinear Models for time series and dynamic systems.