【51单片机快速入门指南】5:软件SPI
目录
- 硬知识
-
- SPI协议简介
- SPI接口介绍
- SPI接口连接图
- SPI数据传输方向
- SPI传输模式
- 软件SPI程序源码
-
- Software_SPI.c
- Software_SPI.h
普中51-单核-A2
STC89C52
Keil uVision V5.29.0.0
PK51 Prof.Developers Kit Version:9.60.0.0
上位机:Vofa+ 1.3.10
源于软件模拟SPI接口程序代码(4种模式)—— 内陆的咸水鱼,有改动。
硬知识
SPI协议简介
SPI的通信原理很简单,一般主从方式工作,这种模式通常有一个主设备和一个或多个从设备,通常采用的是4根线,它们是MISO(数据输入,针对主机来说)、MOSI(数据输出,针对主机来说)、SCLK(时钟,主机产生)、CS/SS(片选,一般由主机发送或者直接使能,通常为低电平有效)
SPI接口介绍
SCK:时钟信号,由主设备产生,所以主设备SCK信号为输出模式,从设备的SCK信号为输入模式。
CS:片选信号,由主设备控制从设备,,所以主设备CS信号为输出模式,从设备的CS信号为输入模式。
MOSI:主设备数据输出,从设备数据输入,所以主设备MOSI信号为输出模式,从设备的MOSI信号为输入模式。
MISO:主设备数据输入,从设备数据输出,所以主设备MISO信号为输入模式,从设备的MISO信号为输出模式。
SPI接口连接图
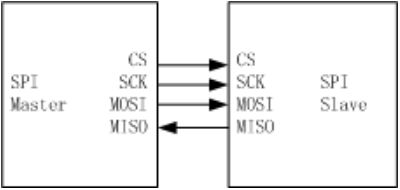
注意:MOSI和MISO不能交叉连接(可以把主从机理解为一个整体系统,MOSI为系统主机发送从机接收的数据线,MISO为主机接收从机发送的数据线)
SPI数据传输方向
SPI作为全双工的的串行通信协议,数据传输时高位在前,低位在后。主机和从机公用由主机产生的SCK信号,所以在每个时钟周期内主机和从机有1bit的数据交换(因为MOSI和MISO数据线上的数据都是在时钟的边沿处被采样)。如下图:

SPI协议规定数据采样是在SCK的上升沿或下降沿时刻(由SPI模式决定,下面会说到),观察上图,在SCK的边沿处(上升沿或下降沿),主机会在MISO数据线上采样(接收来从机的数据),从机会在MOSI数据线上采样(接收来自主机的数据),所以每个时钟周期中会有一bit的数据交换。

SPI传输模式
SPI总线传输一共有4种模式,这4种模式分别由时钟极性(CPOL)和时钟相位(CPHA)来定义。
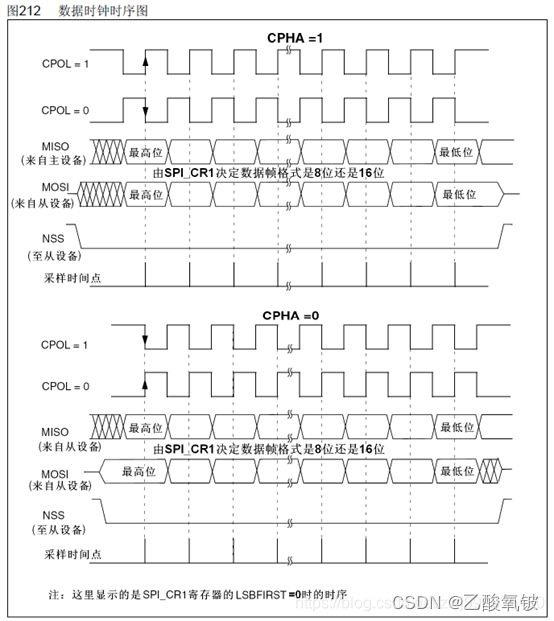
CPOL:规定了SCK时钟信号空闲状态的电平
CPHA:规定了数据是在SCK时钟的上升沿还是下降沿被采样

模式0:CPOL=0,CPHA =0 SCK空闲为低电平,数据在SCK的上升沿被采样(提取数据)
模式1:CPOL=0,CPHA =1 SCK空闲为低电平,数据在SCK的下降沿被采样(提取数据)
模式2:CPOL=1,CPHA =0 SCK空闲为高电平,数据在SCK的下降沿被采样(提取数据)
模式3:CPOL=1,CPHA =1 SCK空闲为高电平,数据在SCK的上升沿被采样(提取数据)
以模式0为例:SCK空闲为低电平,数据在SCK的上升沿被采样(提取数据),在SCK的下降沿切换数据线的数据。
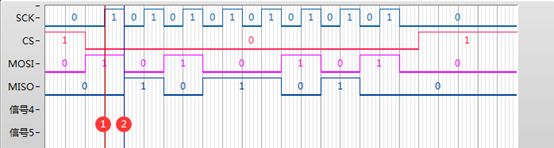
◐在时钟的第1个上升沿(游标1处)(采样点)
MOSI上数据为1,则在此边沿从机采样(提取)数据为1,采样点在MOSI数据线的中间。
MISO上数据为0,则在此边沿主机采样(提取)数据为0,采样点在MISO数据线的中间。
◐在时钟的第1个下降沿(游标2处)(切换点)
MOSI上数据由1切换为0,,数据在时钟下降沿时切换数据。
MISO上数据由0切换为1,,数据在时钟下降沿时切换数据。
◐在时钟的第2~8个上升沿(采样点),主机在MISO上采样数据,从机在MOSI上采样数据。
◐在时钟的第2~8个下降沿(切换点),主机在MISO上切换数据,从机在MOSI上切换数据
软件SPI程序源码
Software_SPI.c
#include "Software_SPI.h"
void SPI_Delay() //每步的间隔 用于等待电平稳定和控制通讯速率
{
}
//MOSI拉高 移植时需修改
void MOSI_H()
{
SPI_MOSI = 1;
}
//MOSI拉低 移植时需修改
void MOSI_L()
{
SPI_MOSI = 0;
}
//MISO拉高 移植时需修改
void MISO_H()
{
SPI_MISO = 1;
}
//MISO拉低 移植时需修改
void MISO_L()
{
SPI_MISO = 0;
}
//SCK拉高 移植时需修改
void SPI_SCK_H()
{
SPI_SCK = 1;
}
//SCK拉低 移植时需修改
void SPI_SCK_L()
{
SPI_SCK = 0;
}
//读取MISO电平 移植时需修改
uint8_t MISO_Read()
{
SPI_MISO = 1;
SPI_Delay();
return SPI_MISO;
}
//空闲时时钟极性(CPOL) 0为低电平 1为高电平
//数据有效时钟缘相位(CPHA) 0为奇数缘 1为偶数缘
/* CPOL = 0, CPHA = 0, MSB first */
uint8_t SOFT_SPI_RW_MODE0(uint8_t write_dat)
{
uint8_t i, read_dat = 0;
SPI_SCK_L();
SPI_Delay();
for( i = 0; i < 8; i++ )
{
if(write_dat & 0x80)
MOSI_H();
else
MOSI_L();
write_dat <<= 1;
SPI_Delay();
SPI_SCK_H();
read_dat <<= 1;
read_dat |= MISO_Read();
SPI_SCK_L();
}
return read_dat;
}
/* CPOL=0,CPHA=1, MSB first */
uint8_t SOFT_SPI_RW_MODE1(uint8_t write_dat)
{
uint8_t i, read_dat = 0;
SPI_SCK_L();
SPI_Delay();
for(i = 0; i < 8; i++) //循环8次
{
SPI_SCK_H(); //拉高时钟
if(write_dat & 0x80)
MOSI_H(); //若最到位为高,则输出高
else
MOSI_L(); //若最到位为低,则输出低
write_dat <<= 1; //低一位移位到最高位
SPI_Delay();
SPI_SCK_L(); //拉低时钟
read_dat <<= 1; //数据左移
read_dat |= MISO_Read();
}
return read_dat; //返回数据
}
/* CPOL=1,CPHA=0, MSB first */
uint8_t SOFT_SPI_RW_MODE2(uint8_t write_dat)
{
uint8_t i, read_dat = 0;
SPI_SCK_H();
SPI_Delay();
for(i = 0; i < 8; i++) // 循环8次
{
if(write_dat & 0x80)
MOSI_H(); //若最到位为高,则输出高
else
MOSI_L(); //若最到位为低,则输出低
write_dat <<= 1; //低一位移位到最高位
SPI_Delay();
SPI_SCK_L(); //拉低时钟
read_dat <<= 1; //数据左移
read_dat |= MISO_Read();
SPI_SCK_H(); //拉高时钟
}
return read_dat; //返回数据
}
/* CPOL = 1, CPHA = 1, MSB first */
uint8_t SOFT_SPI_RW_MODE3(uint8_t write_dat)
{
uint8_t i, read_dat = 0;
SPI_SCK_H();
SPI_Delay();
for( i = 0; i < 8; i++ )
{
SPI_SCK_L();
if(write_dat & 0x80)
MOSI_H();
else
MOSI_L();
write_dat <<= 1;
SPI_Delay();
SPI_SCK_H();
read_dat <<= 1;
read_dat |= MISO_Read();
}
return read_dat;
}
Software_SPI.h
#ifndef SOFTWARE_I2C_H_
#define SOFTWARE_I2C_H_
#include