- Linux指令&&ros学习&&python深度学习&&bug学习笔记
起个别名
LinuxROSPython
##这个文件是关于ros、linux指令,pytorch、python、onnx和相关problem的一些笔记###ROS&&linux**find:在当前路径或指定的路径下递归地搜索文件或目录,并可以根据不同的条件进行过滤和匹配。**```find-name*.pyfind/home/dai/bev_lane_det-main-namemodelsfind/home/dai/bev_lane_d
- ros学习之路径规划
许卿768503
学习
一、全局路径规划中的地图1、栅格地图(GridMap)2、概率图(CostMap)3、特征地图(FeatureMap4、拓扑地图(TopologicalMap)二、全局路径规划算法1、Dijkstra算法2、最佳路径优先搜索算法(BFS)3、A*搜索算法双向A*搜索算法重复A*搜索算法AnytimeRepairingA*(ARA*)搜索算法实时学习A*搜索(LRTA*)算法实时适应性A*搜索(RT
- ROS学习笔记5:常用API和模块导入
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满15篇(5/15)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:初始化,话题服务
- ROS入门、ROS完整教程
ROS学习入门说明:学习视频:古月居ROS入门21讲代码:https://github.com/huchunxu/ros_21_tutorials文章目录ROS学习入门1.ROS常用命令2.工作空间1.创建工作空间2.创建功能包3.配置环境变量3.示例1.发布者示例2.发布者示例4.自定义话题消息与使用1.编写msg文件2.编写测试文件3.编译运行5.示例1.客户端示例2.服务端示例6.自定义服务
- ros学习:6.通信机制概述
Lruriy.
学习
ROS的通信机制主要包括话题通信、服务通信、动作通信以及参数服务器,以下是具体介绍:话题通信(Publish/Subscribe)原理:基于发布/订阅模式,节点可以通过发布者(Publisher)将消息发送到话题,其他节点则可以通过订阅者(Subscriber)接收这些消息。发布者和订阅者之间是异步通信,发布者发布消息后无需等待反馈,继续执行下一个动作;订阅者通过回调函数来处理接收到的消息。流程:
- ROS学习之动作通信
扶我起来我还想学
学习机器人pythonc++
在b站学习赵老师的ROS通信,下面给出相关学习笔记2.4.5_动作通信_小结_哔哩哔哩_bilibili首先,服务端的目标:可以提取客户端请求提交的整形数据,并且累加从1到该数据之间所有整数之和完成每累加一次都计算当前运算进度,连续返回到客户端,在最后显示求和关于C++实现代码:#include"rclcpp/rclcpp.hpp"#include"rclcpp_action/rclcpp_act
- ROS学习话题通信之Python实现
扶我起来我还想学
学习pythonROS2ubuntu
与上一篇C++实现同理下面给出相关的Python实现代码关于py文件的talker:(demo01_talker_str_pyimportrclpyfromrclpy.nodeimportNodefromstd_msgs.msgimportStringclassTalker(Node):def__init__(self):super().__init__("talker_node_py")self
- ROS学习之消息通信
闲逸居士
ros
在ROS中,消息通信有话题,服务,动作,参数。话题(topic)发布者(Publicer)发布话题,订阅者(Subscriber)订阅话题。实质:发布者向主节点注册自己的话题等多种信息,并向该话题推送消息,不在乎谁订阅了。而订阅者订阅自己希望看到的话题的消息,也不在乎是谁推送的消息。所以许多时候,终端可以当作自定义节点使用,插足在其中。a.所以就有很多的特性,你自然而然就通了,异步很正常b.多个发
- 【rviz】ROS学习笔记
zhuyan108
学习笔记机器人
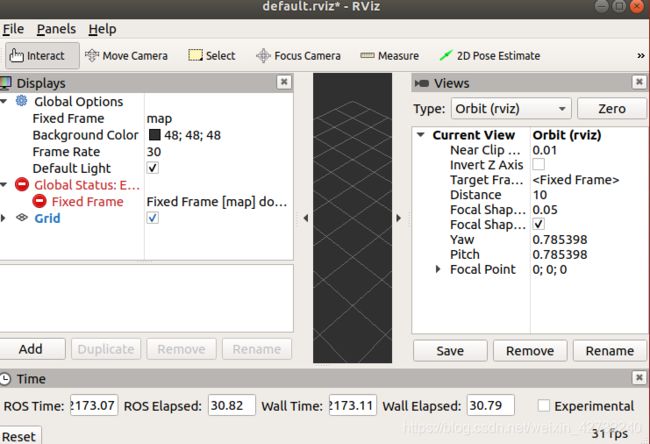
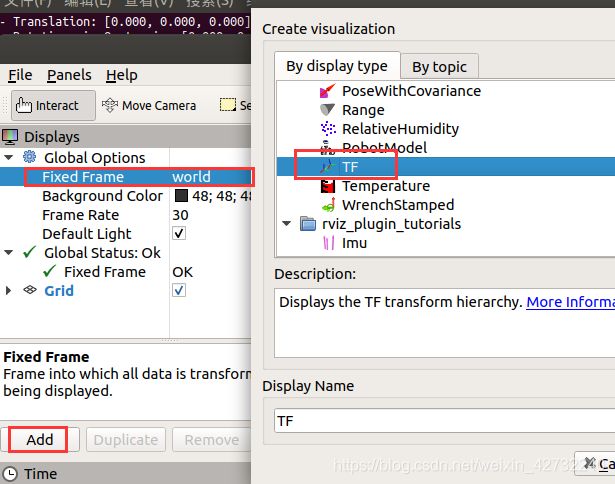
1、.rviz配置文件的导出(1)创建urdf文件(2)创建launch启动文件,在文件中指定urdf、rviz配置文件(3)使用launch文件启动rviz,调整rviz界面的配置,在file,saveas中将当前页面配置保存为.rviz文件。(4)替换launch中的.rviz文件,之后再启动rviz就是按照.rviz中的配置来默认加载。2、rviz加载模型的原理RViz在ROS(RobotO
- ROS学习——通过键盘控制机器人运动
嵵266
学习计算机外设机器人
ROS学习通过键盘实现机器人的运动C++代码在软件包中创建节点代码及其解析如下#include#include#include#includeusingnamespacestd;//设定键位映射(线速度,角速度)map>key_mapping={{'w',{1.0,0.0}},//前进{'s',{-1.0,0.0}},//后退{'a',{0.0,1.0}},//左转{'d',{0.0,-1.0}}
- ROS学习——(三)ROS的通信机制(上)
chillin''
学习c++pythonlinuxubuntu
下面介绍ros中最重要的组成部分——通信。ros的通信将各个孤立的节点联系在一起,进行相应的数据传输和交流,可以说是ros运行的核心。文章目录概述话题通信实现过程角色流程注意应用发布者创建示例:订阅方实现示例ros的消息类型1.标准消息(std_msgs)2.几何消息(geometry_msgs)3.传感器消息(sensor_msgs)4.导航消息(nav_msgs)5.行为消息(actionli
- ROS学习——(一)ROS总体架构
chillin''
学习ubuntu架构
对于第一次接触ros的初学者来说,首先一个问题应该是ros究竟是什么,所谓的机器人操作系统究竟由什么,接下来将由整个系统的结构开始我们的学习。(我的笔记更倾向于大致梗概的分点记录,对于详细连续的知识可能看技术手册会更好)ROS架构分层视图核心组件ROS文件系统1.工作空间(catkinworkspace)顶层2.ROS包(package)`CMake`的基本概念和作用:`catkin`的作用:`c
- 【SolidWorks转URDF】ROS学习笔记
zhuyan108
学习笔记机器人
一、环境配置软件版本:SolidWorks2022SP3.1Premium转换插件版本:sw2urdfSetup2021.exe对硬件有一定要求,需要独立显卡,显存大一点,否则会很卡。二、文件转换SolidWorks中的零部件和装配体对应URDF文件中的link,零部件和装配体之间的连接对应URDF文件中的joint。因此,需要事先将SolidWorks模型划分为正确的零部件和装配体的树形结构,并
- ROS学习笔记之深度相机仿真、小结
要好好养胃
ROS学习笔记人工智能机器学习c++
通过Gazebo模拟kinect摄像头,并在Rviz中显示kinect摄像头数据。实现流程:kinect摄像头仿真基本流程:已经创建完毕的机器人模型,编写一个单独的xacro文件,为机器人模型添加kinect摄像头配置;将此文件集成进xacro文件;启动Gazebo,使用Rviz显示kinect摄像头信息。1.Gazebo仿真Kinect1.1新建Xacro文件,配置kinetic传感器信息//这
- ROS学习笔记之摄像头仿真及显示
要好好养胃
ROS学习笔记人工智能机器学习c++
通过Gazebo模拟摄像头传感器,并在Rviz中显示摄像头数据。实现流程:摄像头仿真基本流程:已经创建完毕的机器人模型,编写一个单独的xacro文件,为机器人模型添加摄像头配置;将此文件集成进xacro文件;启动Gazebo,使用Rviz显示摄像头信息。1.Gazebo仿真摄像头1.1新建Xacro文件,配置摄像头传感器信息有几个要自行修改的地方,基本设置和laser有相同的部分,不做赘述。//实
- ROS学习笔记
xiyuping24
学习笔记机器人图论
下载使用鱼香ROS,一键下载十分好评~学习地址官网网站:ros.wiki调试打开终端,输入roscore,发现最后输出startcoreservice,说明安装成功尝试小海龟,打开另一个终端,输入rosrunturtlesimturtlesim_node,出现小海龟的窗口,说明成功其他小海龟玩法:小海龟画圆关于文件结构最高层是home中自己建的workspace,在里面应该有三大部分:buildd
- ROS学习笔记-roslaunch文件的编写&用sh脚本控制launch文件启动顺序
诗筱涵
ROS无人机-a-个人笔记
转载自:https://mp.weixin.qq.com/s?__biz=MzUyMTkxODQyOQ==&mid=2247484719&idx=1&sn=27b3a01c295ae256dc69d805fd5904ba&chksm=f9d2879dcea50e8b71b78d8b69750d282055173ea65494342e983088276859b7c4fe227f21f1&scene=
- ROS学习(5)可视化和调试工具一
敲代码的雪糕
ROSROS
文章目录前言一、调试ROS节点1、使用gdb调试器调试节点2、在节点启动时调用gdb调试器3、在节点启动时调用valgrind分析节点4、设置ROS节点core文件存储二、日志消息1.输出日志消息2.调试消息级别3.为特定节点配置调试消息级别4.消息命名5.按条件显示消息与过滤消息6.显示消息的方式7.使用rqt_console和rqt_logger_level在运行时修改调试级别总结前言ROS自
- 我的ROS学习笔记(四)
zenpluck
自动驾驶c++
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档publisher程序代码学习前言一、包含消息类型声明二、创建发布者对象三、创建并填充消息对象四、发布消息五、消息发布循环1.节点是否停止工作的检查2.控制消息发布频率总结前言发布者程序包含了很多之前不懂的知识,刚开始也许只能复制粘贴代码来运行实例,但最终目的还是为了自己能够编写这些代码。因此,弄明白哪部分代码是什么意思非常有必要,不
- 黄金票据 --- kerberos学习记录
B1ackMa9ic
学习网络网络攻击模型安全
文章目录Kerberos协议是怎么工作的一、黄金票据利用条件利用步骤Kerberos协议是怎么工作的这里首先要搞懂几个概念:认证服务器(AuthenticationServer,AS):负责首次身份验证和颁发TGT(TicketGrantingTicket)给用户。用户通过AS向Kerberos服务器发送身份验证请求,并在验证通过后获取TGT。授权票证颁发服务器(TicketGrantingSer
- 移动机器人激光SLAM导航(五):Cartographer SLAM 篇
Robot_Yue
自主探索导航学习SLAMCartographer工程化调参
参考Cartographer官方文档Cartographer从入门到精通1.Cartographer安装1.1前置条件推荐在刚装好的Ubuntu16.04或Ubuntu18.04上进行编译ROS安装:ROS学习1:ROS概述与环境搭建1.2依赖库安装资源下载完解压并执行以下指令https://pan.baidu.com/s/1LWqZ4SOKn2sZecQUDDXXEw?pwd=j6cf$sudo
- ROS学习笔记14:Action通信
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(14/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:action通
- ROS学习笔记15:动态参数
代码能跑就可以
学习笔记pythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(15/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:cfg文件,r
- ROS学习笔记13:导航相关消息
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(13/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:导航相关消息1
- ROS学习笔记12:机器人导航实现(理论)
代码能跑就可以
学习笔记机器人vscodepythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(12/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:SLAM,地图
- ROS学习笔记10:rosbag与rqt
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(10/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:rosbag,
- ROS学习笔记8:TF坐标变换
代码能跑就可以
学习笔记vscodepythonc++
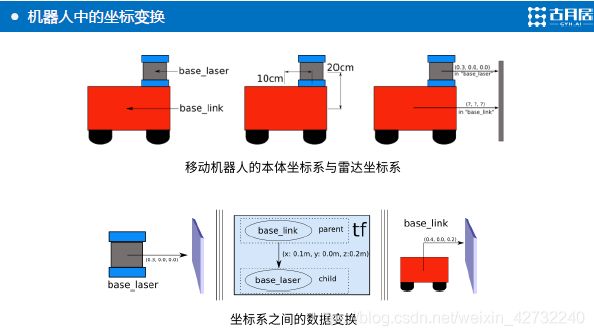
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(8/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:静态变换,动态变
- ROS学习笔记9:TF坐标变换实操
代码能跑就可以
学习笔记pythonc++vscode
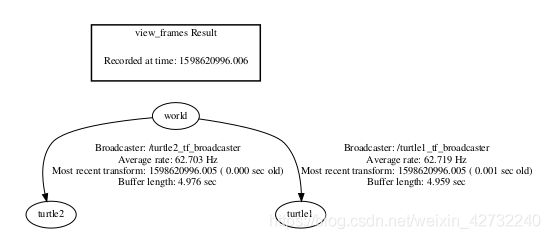
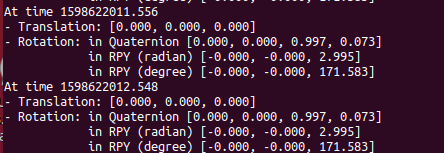
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(9/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:乌龟跟随要求产生
- ROS学习笔记4:通信机制实操
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(4/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:运动控制,位姿订
- ROS学习笔记6:launch文件
代码能跑就可以
学习笔记pythonc++服务器vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(6/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:launch文件
- Spring4.1新特性——综述
jinnianshilongnian
spring 4.1
目录
Spring4.1新特性——综述
Spring4.1新特性——Spring核心部分及其他
Spring4.1新特性——Spring缓存框架增强
Spring4.1新特性——异步调用和事件机制的异常处理
Spring4.1新特性——数据库集成测试脚本初始化
Spring4.1新特性——Spring MVC增强
Spring4.1新特性——页面自动化测试框架Spring MVC T
- Schema与数据类型优化
annan211
数据结构mysql
目前商城的数据库设计真是一塌糊涂,表堆叠让人不忍直视,无脑的架构师,说了也不听。
在数据库设计之初,就应该仔细揣摩可能会有哪些查询,有没有更复杂的查询,而不是仅仅突出
很表面的业务需求,这样做会让你的数据库性能成倍提高,当然,丑陋的架构师是不会这样去考虑问题的。
选择优化的数据类型
1 更小的通常更好
更小的数据类型通常更快,因为他们占用更少的磁盘、内存和cpu缓存,
- 第一节 HTML概要学习
chenke
htmlWebcss
第一节 HTML概要学习
1. 什么是HTML
HTML是英文Hyper Text Mark-up Language(超文本标记语言)的缩写,它规定了自己的语法规则,用来表示比“文本”更丰富的意义,比如图片,表格,链接等。浏览器(IE,FireFox等)软件知道HTML语言的语法,可以用来查看HTML文档。目前互联网上的绝大部分网页都是使用HTML编写的。
打开记事本 输入一下内
- MyEclipse里部分习惯的更改
Array_06
eclipse
继续补充中----------------------
1.更改自己合适快捷键windows-->prefences-->java-->editor-->Content Assist-->
Activation triggers for java的右侧“.”就可以改变常用的快捷键
选中 Text
- 近一个月的面试总结
cugfy
面试
本文是在学习中的总结,欢迎转载但请注明出处:http://blog.csdn.net/pistolove/article/details/46753275
前言
打算换个工作,近一个月面试了不少的公司,下面将一些面试经验和思考分享给大家。另外校招也快要开始了,为在校的学生提供一些经验供参考,希望都能找到满意的工作。
- HTML5一个小迷宫游戏
357029540
html5
通过《HTML5游戏开发》摘抄了一个小迷宫游戏,感觉还不错,可以画画,写字,把摘抄的代码放上来分享下,喜欢的同学可以拿来玩玩!
<html>
<head>
<title>创建运行迷宫</title>
<script type="text/javascript"
- 10步教你上传githib数据
张亚雄
git
官方的教学还有其他博客里教的都是给懂的人说得,对已我们这样对我大菜鸟只能这么来锻炼,下面先不玩什么深奥的,先暂时用着10步干净利索。等玩顺溜了再用其他的方法。
操作过程(查看本目录下有哪些文件NO.1)ls
(跳转到子目录NO.2)cd+空格+目录
(继续NO.3)ls
(匹配到子目录NO.4)cd+ 目录首写字母+tab键+(首写字母“直到你所用文件根就不再按TAB键了”)
(查看文件
- MongoDB常用操作命令大全
adminjun
mongodb操作命令
成功启动MongoDB后,再打开一个命令行窗口输入mongo,就可以进行数据库的一些操作。输入help可以看到基本操作命令,只是MongoDB没有创建数据库的命令,但有类似的命令 如:如果你想创建一个“myTest”的数据库,先运行use myTest命令,之后就做一些操作(如:db.createCollection('user')),这样就可以创建一个名叫“myTest”的数据库。
一
- bat调用jar包并传入多个参数
aijuans
下面的主程序是通过eclipse写的:
1.在Main函数接收bat文件传递的参数(String[] args)
如: String ip =args[0]; String user=args[1]; &nbs
- Java中对类的主动引用和被动引用
ayaoxinchao
java主动引用对类的引用被动引用类初始化
在Java代码中,有些类看上去初始化了,但其实没有。例如定义一定长度某一类型的数组,看上去数组中所有的元素已经被初始化,实际上一个都没有。对于类的初始化,虚拟机规范严格规定了只有对该类进行主动引用时,才会触发。而除此之外的所有引用方式称之为对类的被动引用,不会触发类的初始化。虚拟机规范严格地规定了有且仅有四种情况是对类的主动引用,即必须立即对类进行初始化。四种情况如下:1.遇到ne
- 导出数据库 提示 outfile disabled
BigBird2012
mysql
在windows控制台下,登陆mysql,备份数据库:
mysql>mysqldump -u root -p test test > D:\test.sql
使用命令 mysqldump 格式如下: mysqldump -u root -p *** DBNAME > E:\\test.sql。
注意:执行该命令的时候不要进入mysql的控制台再使用,这样会报
- Javascript 中的 && 和 ||
bijian1013
JavaScript&&||
准备两个对象用于下面的讨论
var alice = {
name: "alice",
toString: function () {
return this.name;
}
}
var smith = {
name: "smith",
- [Zookeeper学习笔记之四]Zookeeper Client Library会话重建
bit1129
zookeeper
为了说明问题,先来看个简单的示例代码:
package com.tom.zookeeper.book;
import com.tom.Host;
import org.apache.zookeeper.WatchedEvent;
import org.apache.zookeeper.ZooKeeper;
import org.apache.zookeeper.Wat
- 【Scala十一】Scala核心五:case模式匹配
bit1129
scala
package spark.examples.scala.grammars.caseclasses
object CaseClass_Test00 {
def simpleMatch(arg: Any) = arg match {
case v: Int => "This is an Int"
case v: (Int, String)
- 运维的一些面试题
yuxianhua
linux
1、Linux挂载Winodws共享文件夹
mount -t cifs //1.1.1.254/ok /var/tmp/share/ -o username=administrator,password=yourpass
或
mount -t cifs -o username=xxx,password=xxxx //1.1.1.1/a /win
- Java lang包-Boolean
BrokenDreams
boolean
Boolean类是Java中基本类型boolean的包装类。这个类比较简单,直接看源代码吧。
public final class Boolean implements java.io.Serializable,
- 读《研磨设计模式》-代码笔记-命令模式-Command
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
import java.util.ArrayList;
import java.util.Collection;
import java.util.List;
/**
* GOF 在《设计模式》一书中阐述命令模式的意图:“将一个请求封装
- matlab下GPU编程笔记
cherishLC
matlab
不多说,直接上代码
gpuDevice % 查看系统中的gpu,,其中的DeviceSupported会给出matlab支持的GPU个数。
g=gpuDevice(1); %会清空 GPU 1中的所有数据,,将GPU1 设为当前GPU
reset(g) %也可以清空GPU中数据。
a=1;
a=gpuArray(a); %将a从CPU移到GPU中
onGP
- SVN安装过程
crabdave
SVN
SVN安装过程
subversion-1.6.12
./configure --prefix=/usr/local/subversion --with-apxs=/usr/local/apache2/bin/apxs --with-apr=/usr/local/apr --with-apr-util=/usr/local/apr --with-openssl=/
- sql 行列转换
daizj
sql行列转换行转列列转行
行转列的思想是通过case when 来实现
列转行的思想是通过union all 来实现
下面具体例子:
假设有张学生成绩表(tb)如下:
Name Subject Result
张三 语文 74
张三 数学 83
张三 物理 93
李四 语文 74
李四 数学 84
李四 物理 94
*/
/*
想变成
姓名 &
- MySQL--主从配置
dcj3sjt126com
mysql
linux下的mysql主从配置: 说明:由于MySQL不同版本之间的(二进制日志)binlog格式可能会不一样,因此最好的搭配组合是Master的MySQL版本和Slave的版本相同或者更低, Master的版本肯定不能高于Slave版本。(版本向下兼容)
mysql1 : 192.168.100.1 //master mysq
- 关于yii 数据库添加新字段之后model类的修改
dcj3sjt126com
Model
rules:
array('新字段','safe','on'=>'search')
1、array('新字段', 'safe')//这个如果是要用户输入的话,要加一下,
2、array('新字段', 'numerical'),//如果是数字的话
3、array('新字段', 'length', 'max'=>100),//如果是文本
1、2、3适当的最少要加一条,新字段才会被
- sublime text3 中文乱码解决
dyy_gusi
Sublime Text
sublime text3中文乱码解决
原因:缺少转换为UTF-8的插件
目的:安装ConvertToUTF8插件包
第一步:安装能自动安装插件的插件,百度“Codecs33”,然后按照步骤可以得到以下一段代码:
import urllib.request,os,hashlib; h = 'eb2297e1a458f27d836c04bb0cbaf282' + 'd0e7a30980927
- 概念了解:CGI,FastCGI,PHP-CGI与PHP-FPM
geeksun
PHP
CGI
CGI全称是“公共网关接口”(Common Gateway Interface),HTTP服务器与你的或其它机器上的程序进行“交谈”的一种工具,其程序须运行在网络服务器上。
CGI可以用任何一种语言编写,只要这种语言具有标准输入、输出和环境变量。如php,perl,tcl等。 FastCGI
FastCGI像是一个常驻(long-live)型的CGI,它可以一直执行着,只要激活后,不
- Git push 报错 "error: failed to push some refs to " 解决
hongtoushizi
git
Git push 报错 "error: failed to push some refs to " .
此问题出现的原因是:由于远程仓库中代码版本与本地不一致冲突导致的。
由于我在第一次git pull --rebase 代码后,准备push的时候,有别人往线上又提交了代码。所以出现此问题。
解决方案:
1: git pull
2:
- 第四章 Lua模块开发
jinnianshilongnian
nginxlua
在实际开发中,不可能把所有代码写到一个大而全的lua文件中,需要进行分模块开发;而且模块化是高性能Lua应用的关键。使用require第一次导入模块后,所有Nginx 进程全局共享模块的数据和代码,每个Worker进程需要时会得到此模块的一个副本(Copy-On-Write),即模块可以认为是每Worker进程共享而不是每Nginx Server共享;另外注意之前我们使用init_by_lua中初
- java.lang.reflect.Proxy
liyonghui160com
1.简介
Proxy 提供用于创建动态代理类和实例的静态方法
(1)动态代理类的属性
代理类是公共的、最终的,而不是抽象的
未指定代理类的非限定名称。但是,以字符串 "$Proxy" 开头的类名空间应该为代理类保留
代理类扩展 java.lang.reflect.Proxy
代理类会按同一顺序准确地实现其创建时指定的接口
- Java中getResourceAsStream的用法
pda158
java
1.Java中的getResourceAsStream有以下几种: 1. Class.getResourceAsStream(String path) : path 不以’/'开头时默认是从此类所在的包下取资源,以’/'开头则是从ClassPath根下获取。其只是通过path构造一个绝对路径,最终还是由ClassLoader获取资源。 2. Class.getClassLoader.get
- spring 包官方下载地址(非maven)
sinnk
spring
SPRING官方网站改版后,建议都是通过 Maven和Gradle下载,对不使用Maven和Gradle开发项目的,下载就非常麻烦,下给出Spring Framework jar官方直接下载路径:
http://repo.springsource.org/libs-release-local/org/springframework/spring/
s
- Oracle学习笔记(7) 开发PLSQL子程序和包
vipbooks
oraclesql编程
哈哈,清明节放假回去了一下,真是太好了,回家的感觉真好啊!现在又开始出差之旅了,又好久没有来了,今天继续Oracle的学习!
这是第七章的学习笔记,学习完第六章的动态SQL之后,开始要学习子程序和包的使用了……,希望大家能多给俺一些支持啊!
编程时使用的工具是PLSQL