计算机视觉——多视图几何
一、基本原理
1.1外极几何
外极几何是研究两幅图像之间存在的几何。它和场景结构无关,只依赖于摄像机的内外参数。研究这种几何可以用在图像匹配、三维重建方面。
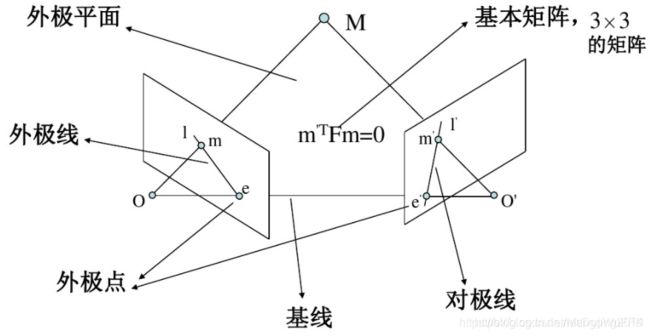
外极点: 基线与像平面的交点。
外极平面: 过基线的平面。
外极线: 对极平面与图像平面的交线。
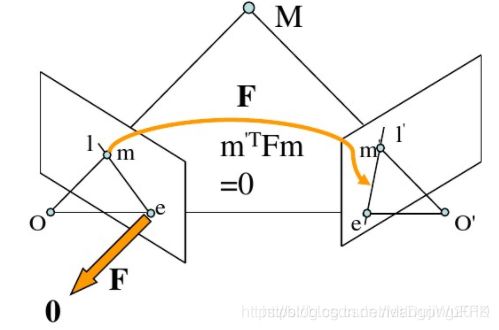
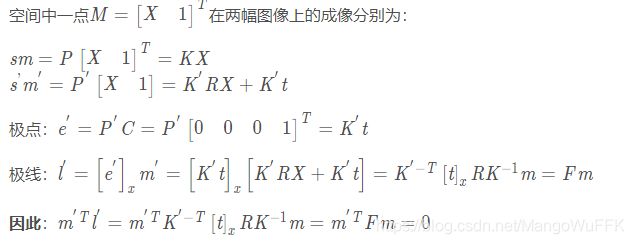
基本矩阵F : 对应点对之间的约束m’Fm=0
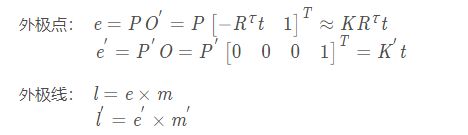
基础矩阵的代数推导:
1.2基础矩阵的估算方法
基础矩阵F是一个3×3的矩阵,有9个未知元素。然而,上面的公式中使用的齐次坐标,齐次坐标在相差一个常数因子下是相等,F也就只有8个未知元素,也就是说,只需要8对匹配的点对就可以求解出两视图的基础矩阵F FF。
假设在两幅图像对应匹配点的坐标分别为:![]()
由基础矩阵公式得
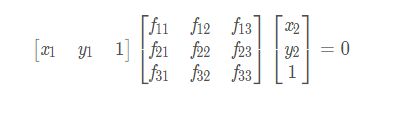
也即:
![]()
将上述公式中的F看成列向量:
![]()
那么可将上述公式改写为:![]()
给定8组点的集合,我们有如下方程:
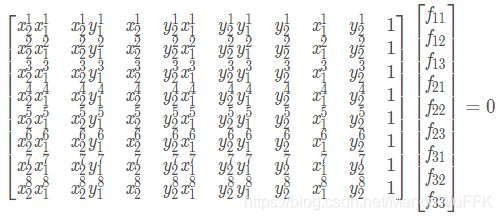
求解上面的方程组就可以得到基础矩阵各个元素了。
八点法 优点: 线性求解,容易实现,运行速度快 . 缺点:对噪声敏感
最小二乘法估算
使用归一化的坐标虽然能够在一定程度上消除噪声、错误匹配带来的影响,但还是不够的。8点法中,只使用8对匹配的点对估计基础矩阵,但通常两幅图像的匹配的点对远远多于8对,可以利用更多匹配的点对来求解上面的方程。
由于基础矩阵F在一个常量因子下是等价的,这样可以给基础矩阵F的元素组成的向量f施加一个约束条件
可以对矩阵Q 进行奇异值分解(SVD)
![]()
在估计基础矩阵时,设其最小奇异值为0,对上面方法取得的基础矩阵进行SVD分解
其最小特征值v3被设为0,以使得F的秩为2.这样得到
上述F就是最终得到的基础矩阵。
二、实验内容和分析
2.1实验内容
1.求解图像之间的基础矩阵
要求:分别用七点、八点、十点(匹配点),计算基础矩阵
2.实验图片包含三种情况,即(1)左右拍摄,极点位于图像平面上(2)像平面接近平行,极点位于无穷远(3)图像拍摄位置位于前后
针对上述情况,画出极点和极线,其中点坐标要均匀分布于各行
2.2 求解图像之间的基础矩阵
1.匹配点为七点
SIFT匹配
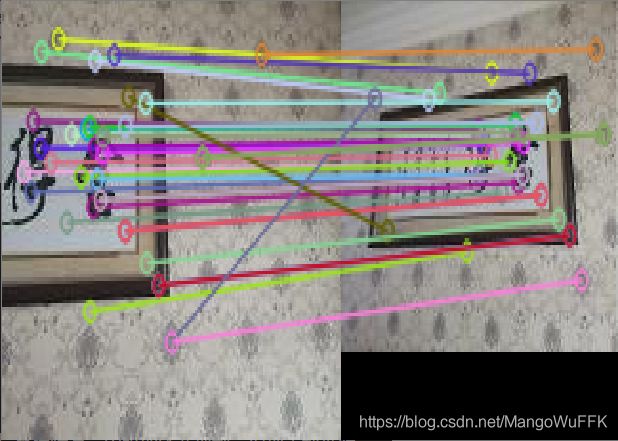
RANSAC筛选
基础矩阵:
[[-3.74405115e-04 2.97061956e-04 2.10048565e-02]
[ 5.22267792e-04 -3.91300262e-04 -3.06613580e-02]
[-1.48410971e-02 8.93704635e-03 1.00000000e+00]]
2.匹配点为八点
SIFT匹配

RANSAC筛选
基础矩阵
[[-2.69636313e-04 -9.17789259e-04 -2.95714666e-02]
[ 8.15264237e-04 1.01311622e-03 6.46453229e-02]
[ 8.17746079e-02 -2.88532391e-01 1.00000000e+00]]
3.匹配点为十点
SIFT匹配后

RANSAC筛选后
基础矩阵:
[[-1.35563615e-04 -4.72508953e-04 2.21439541e-03]
[ 5.46455880e-04 2.37112976e-04 5.28351729e-03]
[ 1.62115556e-02 -9.19249361e-02 1.00000000e+00]]
小结:
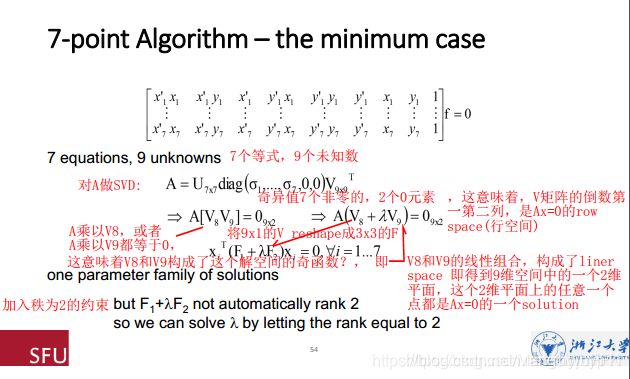
正如8点算法一样,使用7个点对应可得到以下方程:
若图像中仅有7个对应点,当基本矩阵有3个解时,不能断定哪-一个是真解。如果图像中有多于7个点对应,当基本矩阵有3个解时,可选取匹配点对应数最多的矩阵作为基本矩阵的真解。
参考:https://www.jiqizhixin.com/articles/19052902 谭平教授
1.当得到1个实数解、2个虚数解时,直接舍弃虚数解,实数解就是F的唯一 解;
2.当得到3个实数解时,称之为critical condition,这意味着,F的7个点和两个相机中心点,这9个点,通过三维空间中某个特定曲面。在这种特定情况下,7个对应点不能唯一确定一个F。
3.而匹配点大于等于8点时,对基础矩阵并无太大的影响。
2.3代码
def compute_fundamental(x1, x2):
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
A = np.zeros((n, 9))
for i in range(n):
A[i] = [x1[0, i] * x2[0, i], x1[0, i] * x2[1, i], x1[0, i] * x2[2, i],
x1[1, i] * x2[0, i], x1[1, i] * x2[1, i], x1[1, i] * x2[2, i],
x1[2, i] * x2[0, i], x1[2, i] * x2[1, i], x1[2, i] * x2[2, i]]
U, S, V = np.linalg.svd(A)
F = V[-1].reshape(3, 3)
U, S, V = np.linalg.svd(F)
S[2] = 0
F = np.dot(U, np.dot(np.diag(S), V))
return F / F[2, 2]
将匹配点进行归一化处理
def compute_fundamental_normalized(x1, x2):
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# normalize image coordinates
x1 = x1 / x1[2]
mean_1 = np.mean(x1[:2], axis=1)
S1 = np.sqrt(2) / np.std(x1[:2])
T1 = np.array([[S1, 0, -S1 * mean_1[0]], [0, S1, -S1 * mean_1[1]], [0, 0, 1]])
x1 = np.dot(T1, x1)
x2 = x2 / x2[2]
mean_2 = np.mean(x2[:2], axis=1)
S2 = np.sqrt(2) / np.std(x2[:2])
T2 = np.array([[S2, 0, -S2 * mean_2[0]], [0, S2, -S2 * mean_2[1]], [0, 0, 1]])
x2 = np.dot(T2, x2)
# compute F with the normalized coordinates
F = compute_fundamental(x1, x2)
# print (F)
# reverse normalization
F = np.dot(T1.T, np.dot(F, T2))
return F / F[2, 2]
随机选择几对匹配点,用于计算基础矩阵
def randSeed(good, num = 8):
'''
:param good: 初始的匹配点对
:param num: 选择随机选取的点对数量
:return: 8个点对list
'''
eight_point = random.sample(good, num)
return eight_point
因为是三维的,所以此处增加了一个维度使得返回的为(x,y,1) (x,y,1)(x,y,1)的形式,与前述公式对应。
def PointCoordinates(eight_points, keypoints1, keypoints2):
'''
:param eight_points: 随机八点
:param keypoints1: 点坐标
:param keypoints2: 点坐标
:return:8个点
'''
x1 = []
x2 = []
tuple_dim = (1.,)
for i in eight_points:
tuple_x1 = keypoints1[i[0].queryIdx].pt + tuple_dim
tuple_x2 = keypoints2[i[0].trainIdx].pt + tuple_dim
x1.append(tuple_x1)
x2.append(tuple_x2)
return np.array(x1, dtype=float), np.array(x2, dtype=float)
2.4 针对上述情况,画出极点和极线,其中点坐标要均匀分布于各行
1.左右拍摄,极点位于图像平面上
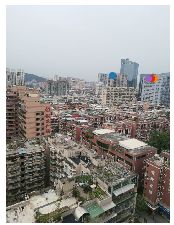
1.1室外景深丰富

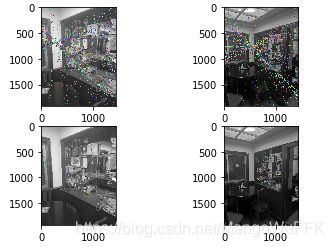
1.2室内景深丰富


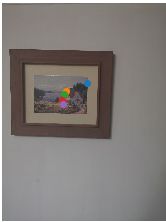
1.3室内景深单一

小结:
无论是室内,室外还是景深复杂与单一,左右拍摄的情况下,极限位于平面上,且每条极限都会交于一个点上,而且极限普遍较少。且极线方向各异没有全部都是平行的。
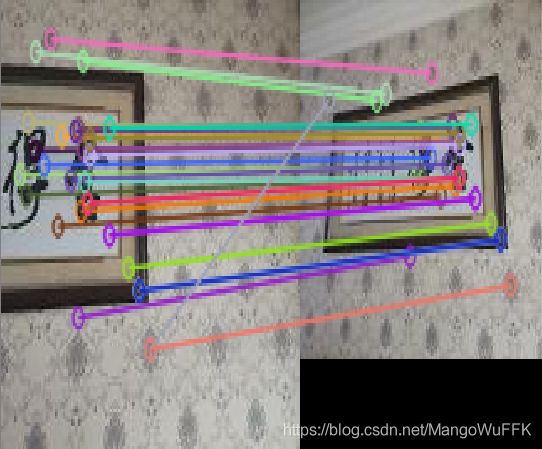
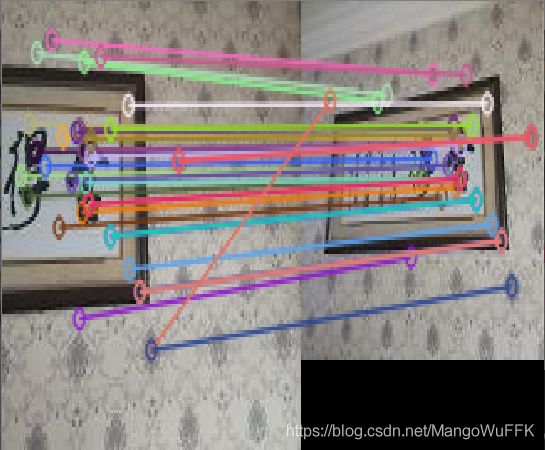
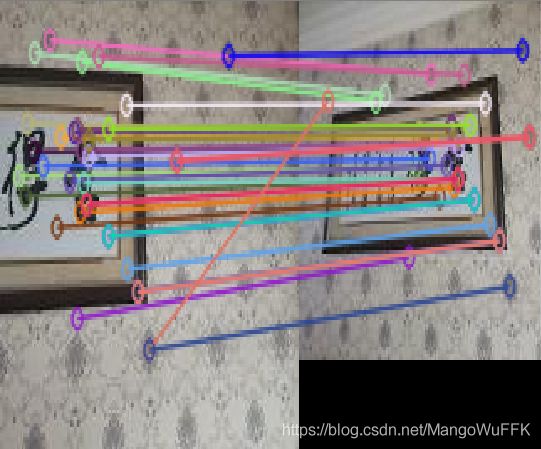
2.像平面接近平行,极点位于无穷远
2.1室内平面平行


2.2室外平面平行


小结:
无论是室内还是室外,每张图的极限都是每条平行向着一个方向,因为平面平行拍摄极点在无穷远处,所以才会变成这样的情况。
2.3图像拍摄位置位于前后
小结:
在采用课本的代码时,对于图像拍摄位置位于前后,无论是室内还是室外,也不受灯光影响,

基本都因为特征点过少而出现这类错误,所以换代码。前后拍摄的话,所有极线都是汇聚在远端的一点上。
2.5代码
print(F)
e = sfm.compute_epipole(F)
# 绘制图像
figure()
imshow(im1)
# 分别绘制每条线,这样会绘制出很漂亮的颜色
for i in range(5):
sfm.plot_epipolar_line(im1,F,x2[:,i],e,False)
axis('off')
figure()
imshow(im2)
print(len(x2))
# 分别绘制每个点,这样会绘制出和线同样的颜色
for i in range(5):
plot(x2[0,i],x2[1,i],'o')
axis('off')
show()
三、错误解决
1.
解决方法:

2.

解决方法: