机器学习与神经网络
5、神经网络
在机器学习中,神经网络一般指的是“神经网络学习”,是机器学习与神经网络两个学科的交叉部分。所谓神经网络,目前用得最广泛的一个定义是“神经网络是由具有适应性的简单单元组成的广泛并行互连的网络,它的组织能够模拟生物神经系统对真实世界物体所做出的交互反应”。
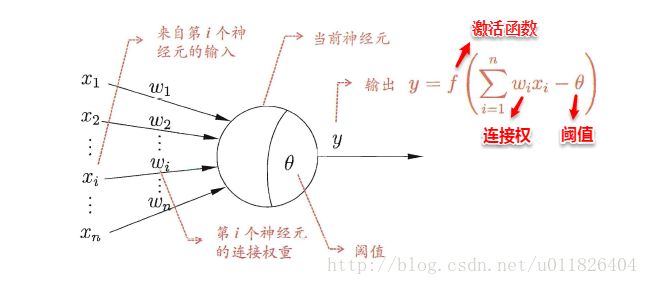
一直沿用至今的“M-P神经元模型”正是对这一结构进行了抽象,也称“阈值逻辑单元“,其中树突对应于输入部分,每个神经元收到n个其他神经元传递过来的输入信号,这些信号通过带权重的连接传递给细胞体,这些权重又称为连接权(connection weight)。细胞体分为两部分,前一部分计算总输入值(即输入信号的加权和,或者说累积电平),后一部分先计算总输入值与该神经元阈值的差值,然后通过激活函数(activation function)的处理,产生输出从轴突传送给其它神经元。M-P神经元模型如下图所示:
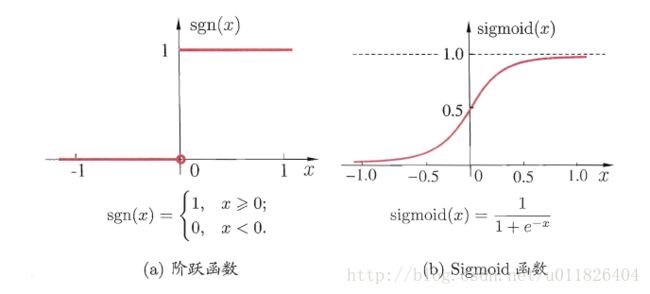
与线性分类十分相似,神经元模型最理想的激活函数也是阶跃函数,即将神经元输入值与阈值的差值映射为输出值1或0,若差值大于零输出1,对应兴奋;若差值小于零则输出0,对应抑制。但阶跃函数不连续,不光滑,故在M-P神经元模型中,也采用Sigmoid函数来近似, Sigmoid函数将较大范围内变化的输入值挤压到 (0,1) 输出值范围内,所以也称为挤压函数(squashing function)。
将多个神经元按一定的层次结构连接起来,就得到了神经网络。它是一种包含多个参数的模型,比方说10个神经元两两连接,则有100个参数需要学习(每个神经元有9个连接权以及1个阈值),若将每个神经元都看作一个函数,则整个神经网络就是由这些函数相互嵌套而成。
于感知机模型只有一层功能神经元,因此其功能十分有限,只能处理线性可分的问题,对于这类问题,感知机的学习过程一定会收敛(converge),因此总是可以求出适当的权值。但是对于像书上提到的异或问题,只通过一层功能神经元往往不能解决,因此要解决非线性可分问题,需要考虑使用多层功能神经元,即神经网络。多层神经网络的拓扑结构如下图所示:
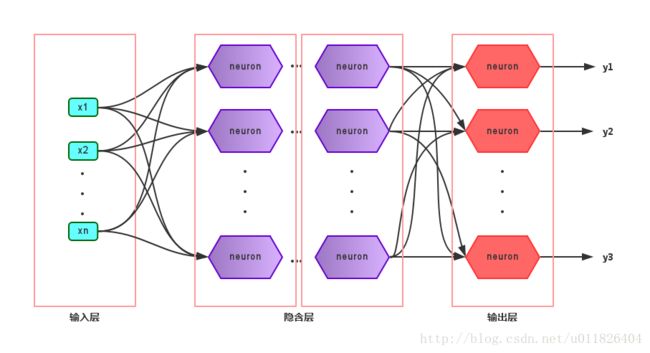
在神经网络中,输入层与输出层之间的层称为隐含层或隐层(hidden layer),隐层和输出层的神经元都是具有激活函数的功能神经元。只需包含一个隐层便可以称为多层神经网络,常用的神经网络称为“多层前馈神经网络”(multi-layer feedforward neural network),该结构满足以下几个特点:
* 每层神经元与下一层神经元之间完全互连
* 神经元之间不存在同层连接
* 神经元之间不存在跨层连接
根据上面的特点可以得知:这里的“前馈”指的是网络拓扑结构中不存在环或回路,而不是指该网络只能向前传播而不能向后传播(下节中的BP神经网络正是基于前馈神经网络而增加了反馈调节机制)。神经网络的学习过程就是根据训练数据来调整神经元之间的“连接权”以及每个神经元的阈值,换句话说:神经网络所学习到的东西都蕴含在网络的连接权与阈值中。
5.3 BP神经网络算法
由上面可以得知:神经网络的学习主要蕴含在权重和阈值中,多层网络使用上面简单感知机的权重调整规则显然不够用了,BP神经网络算法即误差逆传播算法(error BackPropagation)正是为学习多层前馈神经网络而设计,BP神经网络算法是迄今为止最成功的的神经网络学习算法。
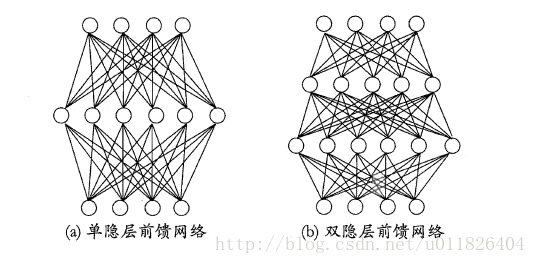
一般而言,只需包含一个足够多神经元的隐层,就能以任意精度逼近任意复杂度的连续函数[Hornik et al.,1989],故下面以训练单隐层的前馈神经网络为例,介绍BP神经网络的算法思想。
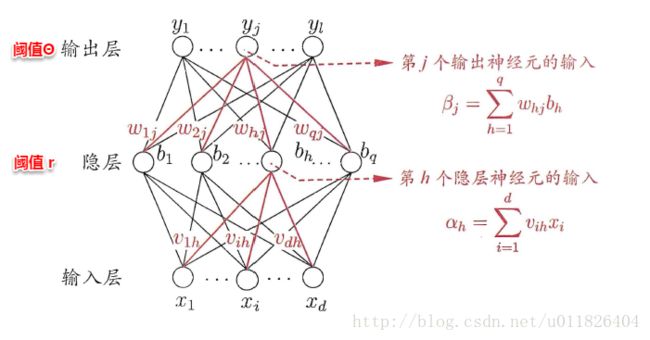
上图为一个单隐层前馈神经网络的拓扑结构,BP神经网络算法也使用梯度下降法(gradient descent),以单个样本的均方误差的负梯度方向对权重进行调节。可以看出:BP算法首先将误差反向传播给隐层神经元,调节隐层到输出层的连接权重与输出层神经元的阈值;接着根据隐含层神经元的均方误差,来调节输入层到隐含层的连接权值与隐含层神经元的阈值。BP算法基本的推导过程与感知机的推导过程原理是相同的,下面给出调整隐含层到输出层的权重调整规则的推导过程:
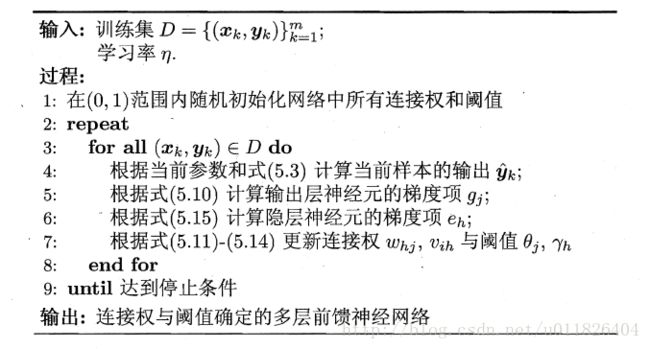
学习率η∈(0,1)控制着沿反梯度方向下降的步长,若步长太大则下降太快容易产生震荡,若步长太小则收敛速度太慢,一般地常把η设置为0.1,有时更新权重时会将输出层与隐含层设置为不同的学习率。BP算法的基本流程如下所示:
BP算法的更新规则是基于每个样本的预测值与真实类标的均方误差来进行权值调节,即BP算法每次更新只针对于单个样例。需要注意的是:BP算法的最终目标是要最小化整个训练集D上的累积误差,即:
如果基于累积误差最小化的更新规则,则得到了累积误差逆传播算法(accumulated error backpropagation),即每次读取全部的数据集一遍,进行一轮学习,从而基于当前的累积误差进行权值调整,因此参数更新的频率相比标准BP算法低了很多,但在很多任务中,尤其是在数据量很大的时候,往往标准BP算法会获得较好的结果。另外对于如何设置隐层神经元个数的问题,至今仍然没有好的解决方案,常使用“试错法”进行调整。
前面提到,BP神经网络强大的学习能力常常容易造成过拟合问题,有以下两种策略来缓解BP网络的过拟合问题:
-
早停:将数据分为训练集与测试集,训练集用于学习,测试集用于评估性能,若在训练过程中,训练集的累积误差降低,而测试集的累积误差升高,则停止训练。
-
引入正则化(regularization):基本思想是在累积误差函数中增加一个用于描述网络复杂度的部分,例如所有权值与阈值的平方和,其中λ∈(0,1)用于对累积经验误差与网络复杂度这两项进行折中,常通过交叉验证法来估计。

5.4 全局最小与局部最小
模型学习的过程实质上就是一个寻找最优参数的过程,例如BP算法试图通过最速下降来寻找使得累积经验误差最小的权值与阈值,在谈到最优时,一般会提到局部极小(local minimum)和全局最小(global minimum)。
* 局部极小解:参数空间中的某个点,其邻域点的误差函数值均不小于该点的误差函数值。
* 全局最小解:参数空间中的某个点,所有其他点的误差函数值均不小于该点的误差函数值。
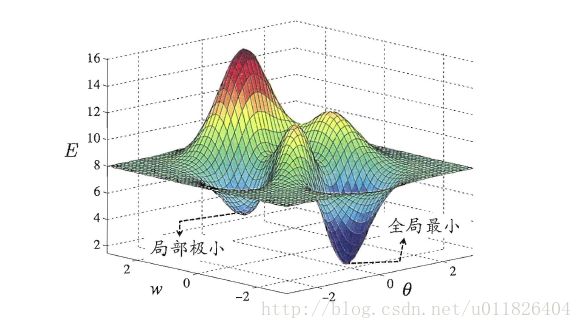
要成为局部极小点,只要满足该点在参数空间中的梯度为零。局部极小可以有多个,而全局最小只有一个。全局最小一定是局部极小,但局部最小却不一定是全局最小。显然在很多机器学习算法中,都试图找到目标函数的全局最小。梯度下降法的主要思想就是沿着负梯度方向去搜索最优解,负梯度方向是函数值下降最快的方向,若迭代到某处的梯度为0,则表示达到一个局部最小,参数更新停止。因此在现实任务中,通常使用以下策略尽可能地去接近全局最小。
* 以多组不同参数值初始化多个神经网络,按标准方法训练,迭代停止后,取其中误差最小的解作为最终参数。
* 使用“模拟退火”技术,这里不做具体介绍。
* 使用随机梯度下降,即在计算梯度时加入了随机因素,使得在局部最小时,计算的梯度仍可能不为0,从而迭代可以继续进行