基于ROS的QT界面开发史上最强教程
使用ROS下的QT插件开发基于ROS界面的程序
1、安装ROS下的ros_qtc_plugin插件及git、gitk工具
1.1.官方指导教程
https://ros-industrial.github.io/ros_qtc_plugin/_source/How-to-Install-Users.html
1.2.坊间流传教程【参考我之前的博文】
ROS下QT环境搭建: https://blog.csdn.net/love1055259415/article/details/80219749
QT导入ROS工程:https://blog.csdn.net/LOVE1055259415/article/details/80066519
1.3.git、gitk工具安装
https://mp.csdn.net/postedit/8029079注意,此方式是在本地仓库上创建代码版本库进行管理,未上传到自己的github。安装git:sudo apt-get install git,接着配置请戳http://www.codexiu.cn/GIT/blog/39420/
2、开发环境配置与开发实例说明【必备参考资料】
https://blog.csdn.net/lightrain0/article/details/71642103
http://www.cnblogs.com/casperwin/p/6206193.html
2.1.最重要的是下面两个pkg的安装配置,基于系统版本,indigo或者是kinect版本
http://www.cnblogs.com/casperwin/p/6206193.html 中第四条 4) Qt Dependances needed in ROSsudo apt-get install ros-indigo-qt-create [sudo apt-get install ros-kinetic-qt-create ]
sudo qpt-get install ros-indigo-qt-build [sudo apt-get install ros-kinetic-qt-build ]

注意:记住该安装方法,在以后的开发过程中,如果有报错的,需要安装相应的包来解决。
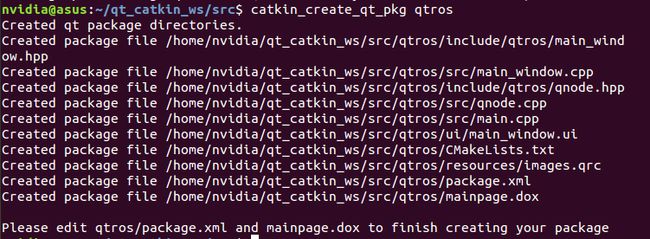
2.2. 创建QTROS代码模板
Createa QtROS GUI template
$cd src
$catkin_create_qt_create qtros
$ source devel/setup.bash
where“qtros” is the package name you created.
Normally,it will show you as
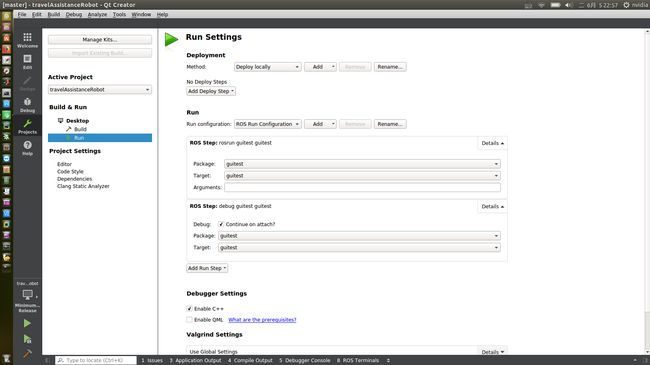
2.3 运行调试
添加ROS Attach和ROS run
2.4. “官方”Tutorial及其他参考教程
【重要】“官方”教程
http://www.cnblogs.com/casperwin/p/6206193.htm
github中其他参考模板
https://github.com/stonier/qt_ros
2.5.工程写法与注意事项
仿照qnode.hpp、qnode.cpp分别实现各个节点的功能,最终生成一个启动文件,在devel/lib/${project}/目录下
可能出现的问题:
(1)可能出现找不到opencv相关的函数、找不到opencvCmake.txt文件等错误(即使你已经定义好、装好opencv、也找的到相关cmake文件)
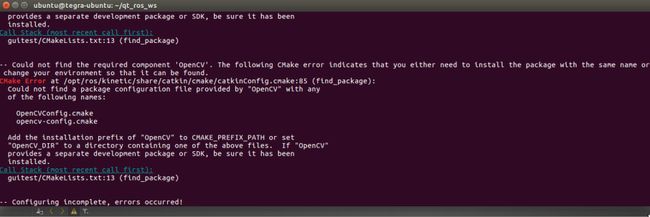
此时,修改节点配置文件CMakeList.txt,添加OpenCV,同时加上:
find_package( OpenCV REQUIRED) 【其他地方的这种问题也可以这样解决】
find_package(catkin REQUIRED COMPONENTS qt_build roscpp std_msgs cv_bridge image_transport OpenCV)
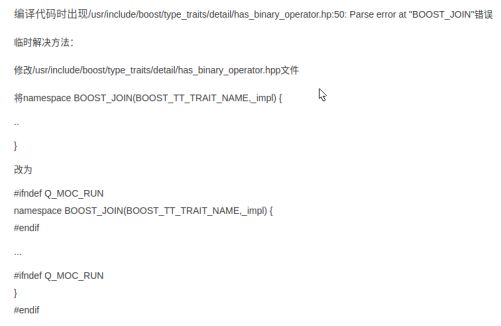
(2)BOOST库的问题
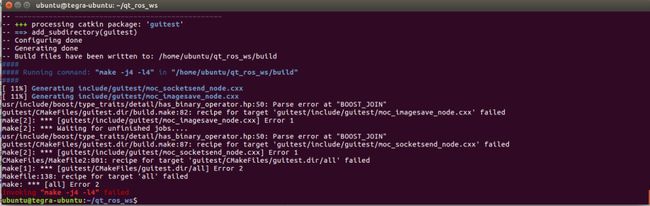
解决办法:https://blog.csdn.net/h321654/article/details/54582341
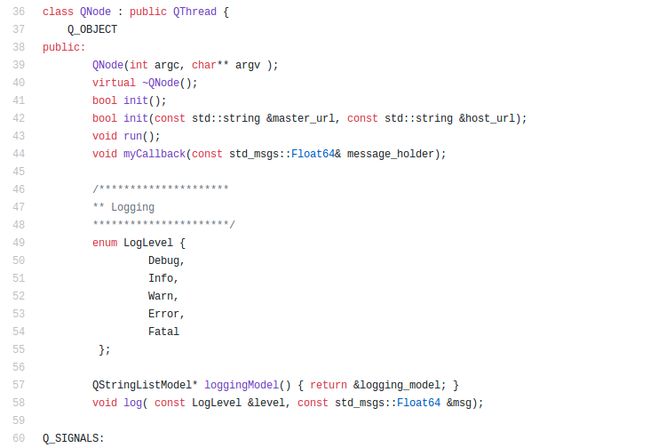
参考工程demo:https://github.com/xpharry/ROSCppGUI/tree/master/QtROS_GUI。尤其注意回调函数的写法:
声明:
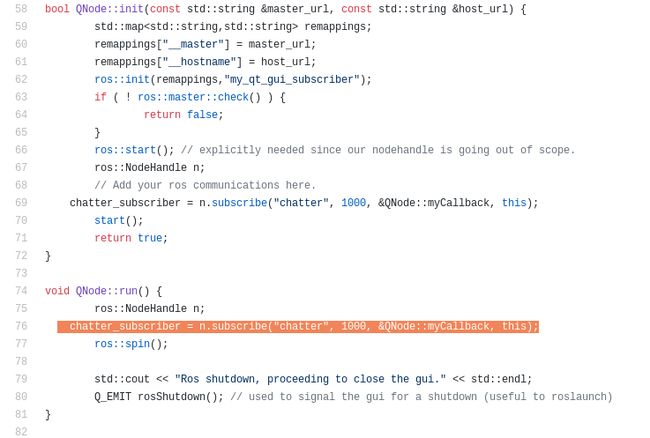
定义:
2.6.节点间编译实现方式、顺序
2.6.1 star函数与ros::star()函数2.6.2 添加好自己的节点之后,编译无错误,但是如何让自己的节点运行呢?
2.6.3 节点类是在哪里实例化?
2.6.4 mainwindow中的信号槽?窗口移动与固定大小?
2.6.5 mainwindow中实例化节点时候,报错,节点初始化函数找不到解决办法:
回到终端,找到项目工程路径,然后手动catkin_make,编译通过
2.6.6 ros中定时器回调函数的触发方式
ros中设置定时器后,依靠ros::spin()方法和ros::spin()方法来出发定时器事件!只有在执行到这两句话之后才会触发回调函数[不仅仅是定时器回调,还包括其他回调]。spin会在回调函数队列中死循环,不执行下一句话,spinOnce会执行一次回调函数,然后接着执下面的代码。关于二者详细的比较可以参照这篇博客https://blog.csdn.net/LOVE1055259415/article/details/79553663 。
2.7 终端调用
2.7.1 终端调用的几种形式
(1) &表示执行此终端调用后可以执行其他终端调用或者响应,这里不加&的话,执行roscore会闪退。
system("gnome-terminal -x bash -c ' roscore '&");(2) limited:=true'&表示的含义是??
system("gnome-terminal -x bash -c ' roslaunch usb_cam usb_cam-test.launch limited:=true'&");(3) sim:= true' &表示的含义是??
system("gnome-terminal -x bash -c 'source /home/ubuntu/turtlebot/devel/setup.bash;roslaunch turtlebot_rviz_launchers view_navigation.launch sim:=true'&");2.7.2
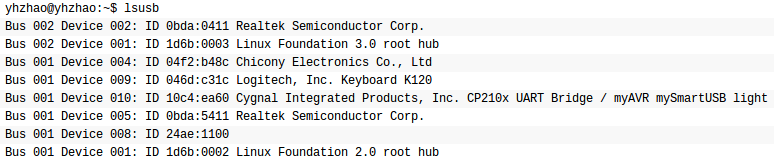
3、Linux下串口设备别名及赋予读写权限
在机器人开发过程中,发现串口号经常变,每次插入不同的位置,串口号都可能会变化,如果每次都在程序中修改串口号就太麻烦 了, 因此重新给串口设置别名,利用第二个名字来在程序中读取,就可以避免这种问题了
https://blog.csdn.net/zong596568821xp/article/details/78579734
sudo gedit /etc/udev/rules.d/rplidar.rules
添加以下内容:
KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", MODE:="0777", SYMLINK+="rplidar"
4、QT下使用C++和Python混合编程
https://www.cnblogs.com/xia-weiwen/p/7932379.html
5、socket图传,C++与Python混合编程
6、qt编程学习
http://www.icoolxue.com/album/show/282
6.1 qt使用web空间显示网页
注意,ROS下qt工程不同于普通ROS工程【项目配置文件是.pro文件】,是CMake工程【项目配置文件是CMakeList.txt文件】。.pto中添加的应该是QT += webkit;此时在CMakeList中添加的应该是
rosbuild_prepare_qt4(QtCore QtGui QtWebkit) # Add the appropriate components to the component list here

如果不添加,则会报错:QWebView::QWebView()未定义等。
附:普通qt的web工程应该是:
6.2