| 版本 | 日期 | 备注 |
|---|---|---|
| 1.0 | 2024.2.18 | 文章首发 |
本文的的源码分析全部基于TiDB6.5来做分析。
1.引子
如果让你做一个分布式数据库的优化器,面对以下的SQL,你会想到什么好的方法去执行他们呢?
SELECT id, name FROM person WHERE age >= 18 or height > 180 limit 100;:从条件上看,我们看到条件其实是二选一的:age >= 18 or height > 180。基于这种情况,我们肯定会去选择有索引的数据,如果都有索引or都没有,那么肯定选择扫描行数最少的数据。如果有一些算子在里面的话,则额外需要考虑数据的就近原则——有些算子在部分架构下可以充分利用MPP的能力,而有些则不行。SELECT orders.order_id, customers.customer_name, orders.order_date FROM orders LEFT JOIN customers ON orders.customer_id=customers.customer_id;分布式数据库中的join,最优的方式就是小表广播到大表数据所在的地方。那么首先我们得知道谁是小表,谁是大表。
2.统计信息收集
根据前面的两个例子,我们可以发现——如果我们需要找到SQL对应的最佳计划,我们会需要一些表的元数据,或者说是统计信息。从常规的角度来说,以下统计信息是必须收集的:
- 表的总行数
- 每列数据的平均大小
- 每列数据的基数:即NDV(distinct value)
- 列的NULL值个数
如果是事务型的(行式存储),那么还要考虑索引平均长度、值的分布等等。
如果是分析型的(列式存储),那么还需要考虑相关列的最大值、最小值等等。
而统计方式的收集,会有多种方式。主要是考虑资源和准确性之间的Trade off。常见的有:
- TopN:相关数据出现次数前 n 的值。
- 直方图:用于描述数据分布图的工具。按照数据的值大小进行分桶,并用一些简单的数据来描述每个桶,比如落在桶里的值的个数。
- 2D直方图:由于直方图无法反应列之间的关联,可以用2D直方图(联合分布)做到,但空间占用也比较多。
- Count-Min Sketch:类似哈希表加上计算器的实现。可以用很少的数据来描述全体数据的特性。
- HyperLogLog:一种估算海量数据基数的方法。很多情况下,统计并不需要那么精确。工程方面要在使用资源和准确性里找平衡。因此有人提出用HLL,这是一种占用资源少,但能给出较为准确的近似结果的算法。
TiDB收集的统计信息见:https://docs.pingcap.com/zh/tidb/v6.5/statistics#%E7%9B%B4%E6...
3.代价的评估
一个SQL真正的物理执行计划可能是有多个的。在以统计信息为基础之上,我们还需要加入相应的权重,举个例子:
- 如果能够在内存中计算完成,就不用去反复发起本地IO
- 如果能在本地IO中完成,就不要去发起网络请求
等等...
这在TiDB的代码中也有对应的默认值。
DefOptCPUFactor = 3.0
DefOptCopCPUFactor = 3.0
DefOptTiFlashConcurrencyFactor = 24.0
DefOptNetworkFactor = 1.0
DefOptScanFactor = 1.5
DefOptDescScanFactor = 3.0
DefOptSeekFactor = 20.0
DefOptMemoryFactor = 0.001
DefOptDiskFactor = 1.5
DefOptConcurrencyFactor = 3.0var defaultVer2Factors = costVer2Factors{
TiDBTemp: costVer2Factor{"tidb_temp_table_factor", 0.00},
TiKVScan: costVer2Factor{"tikv_scan_factor", 40.70},
TiKVDescScan: costVer2Factor{"tikv_desc_scan_factor", 61.05},
TiFlashScan: costVer2Factor{"tiflash_scan_factor", 11.60},
TiDBCPU: costVer2Factor{"tidb_cpu_factor", 49.90},
TiKVCPU: costVer2Factor{"tikv_cpu_factor", 49.90},
TiFlashCPU: costVer2Factor{"tiflash_cpu_factor", 2.40},
TiDB2KVNet: costVer2Factor{"tidb_kv_net_factor", 3.96},
TiDB2FlashNet: costVer2Factor{"tidb_flash_net_factor", 2.20},
TiFlashMPPNet: costVer2Factor{"tiflash_mpp_net_factor", 1.00},
TiDBMem: costVer2Factor{"tidb_mem_factor", 0.20},
TiKVMem: costVer2Factor{"tikv_mem_factor", 0.20},
TiFlashMem: costVer2Factor{"tiflash_mem_factor", 0.05},
TiDBDisk: costVer2Factor{"tidb_disk_factor", 200.00},
TiDBRequest: costVer2Factor{"tidb_request_factor", 6000000.00},
}4.执行计划枚举与择优
当我们可以评估出物理执行计划的代价时,将会枚举所有可以用上物理执行计划,并在其中选择代价最小的物理执行计划。一般枚举分为两个流派:
- 自底向上:代表有System R。
- 自顶向下:代表有Cascade。
自底向上没法解决一个问题。当上层对下层的输出结果顺序感兴趣时,那就不能只能从底层的视角来寻找局部最优。
举个例子,多表Join。一开始两个表Join可能HashJoin代价很低,但是Join下一个表时,用MergeJoin从整体来看代价更低。从这个case来看,自底向上来做计划取优并不合适。
所以有了Cascade:
- 搜索方案是自顶向下的。这意味着它可以避免局部最优而导致全局不优。从Operator Tree 自顶向下遍历时,可以做一系列变换:
-
- Implementation:逻辑算子可以转换成物理算子;例如Join转换成NestLoop或者HashJoin等
- Exploration:逻辑算子可以做等价变换;例如交换Inner Join的两个子节点,即可枚举Join顺序

图片来自于:Cascades Optimizer——https://zhuanlan.zhihu.com/p/73545345
- 它是基于Volcano模型演进而来的。
- 用面向对象的方式进行建模,编写规则时不需要关心搜索过程。相比传统优化器中面向过程去一条条的编写,的确是很大的改进。
5.TiDB的实现
大致的代码调用链为:
-- session/session.go
\-- ExecuteStmt //SQL执行的入口
|-- executor/compiler.go
\-- Compile //将SQL变成可执行的计划
|--planner/planner/optmize.go
\-- Optimize //优化的入口
\-- optimize //这里有两个入口。一种是新的优化器入口,一种是老的优化器入口。根据配置来选择。最终都会返回最优的物理执行计划。
|-- planner/cascades/optmize.go
\--FindBestPlan 见5.1
\-- onPhasePreprocessing //见5.3
\-- implGroup
|--planner/core/optmizer.go //见5.4
\-- DoOptimize
\-- physicalOptimize
|--planner/core/find_best_task.go
\-- findBestTask
\-- enumeratePhysicalPlans4Task
\-- compareTaskCost
\-- getTaskPlanCost
|-- planner/core/plan_cost_ver2.go
\-- getPlanCost5.1 逻辑优化
核心入口为:
// FindBestPlan is the optimization entrance of the cascades planner. The
// optimization is composed of 3 phases: preprocessing, exploration and implementation.
//
// ------------------------------------------------------------------------------
// Phase 1: Preprocessing
// ------------------------------------------------------------------------------
//
// The target of this phase is to preprocess the plan tree by some heuristic
// rules which should always be beneficial, for example Column Pruning.
//
// ------------------------------------------------------------------------------
// Phase 2: Exploration
// ------------------------------------------------------------------------------
//
// The target of this phase is to explore all the logically equivalent
// expressions by exploring all the equivalent group expressions of each group.
//
// At the very beginning, there is only one group expression in a Group. After
// applying some transformation rules on certain expressions of the Group, all
// the equivalent expressions are found and stored in the Group. This procedure
// can be regarded as searching for a weak connected component in a directed
// graph, where nodes are expressions and directed edges are the transformation
// rules.
//
// ------------------------------------------------------------------------------
// Phase 3: Implementation
// ------------------------------------------------------------------------------
//
// The target of this phase is to search the best physical plan for a Group
// which satisfies a certain required physical property.
//
// In this phase, we need to enumerate all the applicable implementation rules
// for each expression in each group under the required physical property. A
// memo structure is used for a group to reduce the repeated search on the same
// required physical property.
func (opt *Optimizer) FindBestPlan(sctx sessionctx.Context, logical plannercore.LogicalPlan) (p plannercore.PhysicalPlan, cost float64, err error) {
logical, err = opt.onPhasePreprocessing(sctx, logical)
if err != nil {
return nil, 0, err
}
rootGroup := memo.Convert2Group(logical)
err = opt.onPhaseExploration(sctx, rootGroup)
if err != nil {
return nil, 0, err
}
p, cost, err = opt.onPhaseImplementation(sctx, rootGroup)
if err != nil {
return nil, 0, err
}
err = p.ResolveIndices()
return p, cost, err
}注释+代码很干净,这里一共做三件事
- onPhasePreprocessing:注释很实在,说
for example Column Pruning,结果里面真的只做了列裁剪。 - onPhaseExploration:探索所有逻辑等价存在的可能
- onPhaseImplementation:根据代价寻找最优的物理执行计划
这块官网的博客写的非常好,我就不重复了:https://cn.pingcap.com/blog/tidb-cascades-planner/
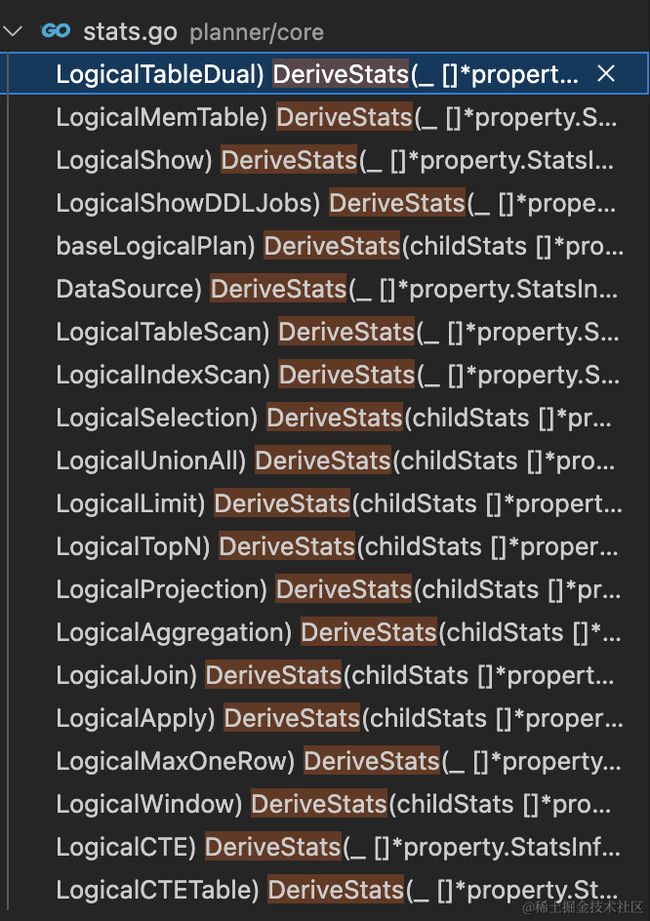
5.2 统计信息收集
这块代码主要集中在stats.go里,里面的核心数据结构是stats_info.go里的StatsInfo。调用链大致为:
|-- planner/cascades/optimizer.go
\--fillGroupStats
|-- planner/core/stats.go
\--DeriveStatstype LogicalPlan interface {
Plan
//......忽略一些代码
// DeriveStats derives statistic info for current plan node given child stats.
// We need selfSchema, childSchema here because it makes this method can be used in
// cascades planner, where LogicalPlan might not record its children or schema.
DeriveStats(childStats []*property.StatsInfo, selfSchema *expression.Schema, childSchema []*expression.Schema, colGroups [][]*expression.Column) (*property.StatsInfo, error)
//......忽略一些代码
}有很多结构体实现了这个方法:
- 收集统计信息主要是analyze.go#Next方法中调用的#analyzeWorker。
5.3 新版本 物理执行计划的选择
代码入口为:
// implGroup finds the best Implementation which satisfies the required
// physical property for a Group. The best Implementation should have the
// lowest cost among all the applicable Implementations.
//
// g: the Group to be implemented.
// reqPhysProp: the required physical property.
// costLimit: the maximum cost of all the Implementations.
func (opt *Optimizer) implGroup(g *memo.Group, reqPhysProp *property.PhysicalProperty, costLimit float64) (memo.Implementation, error) {
groupImpl := g.GetImpl(reqPhysProp)
if groupImpl != nil {
if groupImpl.GetCost() <= costLimit {
return groupImpl, nil
}
return nil, nil
}
// Handle implementation rules for each equivalent GroupExpr.
var childImpls []memo.Implementation
err := opt.fillGroupStats(g)
if err != nil {
return nil, err
}
outCount := math.Min(g.Prop.Stats.RowCount, reqPhysProp.ExpectedCnt)
for elem := g.Equivalents.Front(); elem != nil; elem = elem.Next() {
curExpr := elem.Value.(*memo.GroupExpr)
impls, err := opt.implGroupExpr(curExpr, reqPhysProp)
if err != nil {
return nil, err
}
for _, impl := range impls {
childImpls = childImpls[:0]
for i, childGroup := range curExpr.Children {
childImpl, err := opt.implGroup(childGroup, impl.GetPlan().GetChildReqProps(i), impl.GetCostLimit(costLimit, childImpls...))
if err != nil {
return nil, err
}
if childImpl == nil {
impl.SetCost(math.MaxFloat64)
break
}
childImpls = append(childImpls, childImpl)
}
if impl.GetCost() == math.MaxFloat64 {
continue
}
implCost := impl.CalcCost(outCount, childImpls...)
if implCost > costLimit {
continue
}
if groupImpl == nil || groupImpl.GetCost() > implCost {
groupImpl = impl.AttachChildren(childImpls...)
costLimit = implCost
}
}
}
// Handle enforcer rules for required physical property.
for _, rule := range GetEnforcerRules(g, reqPhysProp) {
newReqPhysProp := rule.NewProperty(reqPhysProp)
enforceCost := rule.GetEnforceCost(g)
childImpl, err := opt.implGroup(g, newReqPhysProp, costLimit-enforceCost)
if err != nil {
return nil, err
}
if childImpl == nil {
continue
}
impl := rule.OnEnforce(reqPhysProp, childImpl)
implCost := enforceCost + childImpl.GetCost()
impl.SetCost(implCost)
if groupImpl == nil || groupImpl.GetCost() > implCost {
groupImpl = impl
costLimit = implCost
}
}
if groupImpl == nil || groupImpl.GetCost() == math.MaxFloat64 {
return nil, nil
}
g.InsertImpl(reqPhysProp, groupImpl)
return groupImpl, nil
}这里个函数会找出潜在符合条件的物理执行计划,并不断的搜索。但它有一个剪枝逻辑——会记录当前最小的cost,如果一个执行计划自上向下搜索时,如果超过了这个cost,则直接返回。这就是在第3节提到的自顶向下的优化。
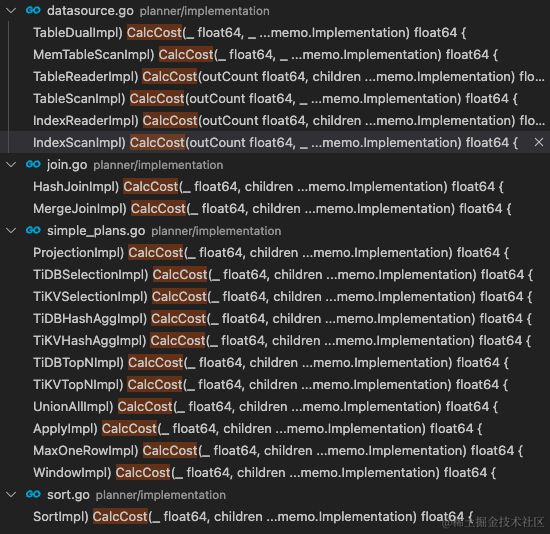
接下来我们看一下memo.Implementation的定义:
package memo
import (
plannercore "github.com/pingcap/tidb/planner/core"
)
// Implementation defines the interface for cost of physical plan.
type Implementation interface {
CalcCost(outCount float64, children ...Implementation) float64
SetCost(cost float64)
GetCost() float64
GetPlan() plannercore.PhysicalPlan
// AttachChildren is used to attach children implementations and returns it self.
AttachChildren(children ...Implementation) Implementation
// GetCostLimit gets the costLimit for implementing the next childGroup.
GetCostLimit(costLimit float64, children ...Implementation) float64
}其中CalcCost方法就是用来计算物理执行计划的代价。一共有这么多结构体实现了它:
5.3.1 代价的评估
我们以开头的例子,讲解代价的评估。
select代价计算方式
// CalcCost calculates the cost of the table scan Implementation.
func (impl *TableScanImpl) CalcCost(outCount float64, _ ...memo.Implementation) float64 {
ts := impl.plan.(*plannercore.PhysicalTableScan)
width := impl.tblColHists.GetTableAvgRowSize(impl.plan.SCtx(), impl.tblCols, kv.TiKV, true)
sessVars := ts.SCtx().GetSessionVars()
impl.cost = outCount * sessVars.GetScanFactor(ts.Table) * width
if ts.Desc {
impl.cost = outCount * sessVars.GetDescScanFactor(ts.Table) * width
}
return impl.cost
}
// GetScanFactor returns the session variable scanFactor
// returns 0 when tbl is a temporary table.
func (s *SessionVars) GetScanFactor(tbl *model.TableInfo) float64 {
if tbl != nil {
if tbl.TempTableType != model.TempTableNone {
return 0
}
}
return s.scanFactor
}
// CalcCost implements Implementation interface.
func (impl *IndexScanImpl) CalcCost(outCount float64, _ ...memo.Implementation) float64 {
is := impl.plan.(*plannercore.PhysicalIndexScan)
sessVars := is.SCtx().GetSessionVars()
rowSize := impl.tblColHists.GetIndexAvgRowSize(is.SCtx(), is.Schema().Columns, is.Index.Unique)
cost := outCount * rowSize * sessVars.GetScanFactor(is.Table)
if is.Desc {
cost = outCount * rowSize * sessVars.GetDescScanFactor(is.Table)
}
cost += float64(len(is.Ranges)) * sessVars.GetSeekFactor(is.Table)
impl.cost = cost
return impl.cost
}这里我们以全表扫描表和命中索引的代码为例子。其中默认的scanFactor是1.5。这里可以看到indexScan和tableScan少了一个因数:width。这个变量代表了所需列的平均大小。这么看基本上是indexScan最优了。
这里的代码笔者认为有点不优雅——当Desc时,其实之前的Cost是没必要算一遍的,浪费CPU资源。
join代价计算方式
// CalcCost implements Implementation CalcCost interface.
func (impl *HashJoinImpl) CalcCost(_ float64, children ...memo.Implementation) float64 {
hashJoin := impl.plan.(*plannercore.PhysicalHashJoin)
// The children here are only used to calculate the cost.
hashJoin.SetChildren(children[0].GetPlan(), children[1].GetPlan())
selfCost := hashJoin.GetCost(children[0].GetPlan().StatsCount(), children[1].GetPlan().StatsCount(), false, 0, nil)
impl.cost = selfCost + children[0].GetCost() + children[1].GetCost()
return impl.cost
}
// CalcCost implements Implementation CalcCost interface.
func (impl *MergeJoinImpl) CalcCost(_ float64, children ...memo.Implementation) float64 {
mergeJoin := impl.plan.(*plannercore.PhysicalMergeJoin)
// The children here are only used to calculate the cost.
mergeJoin.SetChildren(children[0].GetPlan(), children[1].GetPlan())
selfCost := mergeJoin.GetCost(children[0].GetPlan().StatsCount(), children[1].GetPlan().StatsCount(), 0)
impl.cost = selfCost + children[0].GetCost() + children[1].GetCost()
return impl.cost
}具体的计算都在plan_cost_v1.go里:
// GetCost computes cost of hash join operator itself.
func (p *PhysicalHashJoin) GetCost(lCnt, rCnt float64, isMPP bool, costFlag uint64, op *physicalOptimizeOp) float64 {
buildCnt, probeCnt := lCnt, rCnt
build := p.children[0]
// Taking the right as the inner for right join or using the outer to build a hash table.
if (p.InnerChildIdx == 1 && !p.UseOuterToBuild) || (p.InnerChildIdx == 0 && p.UseOuterToBuild) {
buildCnt, probeCnt = rCnt, lCnt
build = p.children[1]
}
sessVars := p.ctx.GetSessionVars()
oomUseTmpStorage := variable.EnableTmpStorageOnOOM.Load()
memQuota := sessVars.MemTracker.GetBytesLimit() // sessVars.MemQuotaQuery && hint
rowSize := getAvgRowSize(build.statsInfo(), build.Schema().Columns)
spill := oomUseTmpStorage && memQuota > 0 && rowSize*buildCnt > float64(memQuota) && p.storeTp != kv.TiFlash
// Cost of building hash table.
cpuFactor := sessVars.GetCPUFactor()
diskFactor := sessVars.GetDiskFactor()
memoryFactor := sessVars.GetMemoryFactor()
concurrencyFactor := sessVars.GetConcurrencyFactor()
cpuCost := buildCnt * cpuFactor
memoryCost := buildCnt * memoryFactor
diskCost := buildCnt * diskFactor * rowSize
// Number of matched row pairs regarding the equal join conditions.
helper := &fullJoinRowCountHelper{
sctx: p.SCtx(),
cartesian: false,
leftProfile: p.children[0].statsInfo(),
rightProfile: p.children[1].statsInfo(),
leftJoinKeys: p.LeftJoinKeys,
rightJoinKeys: p.RightJoinKeys,
leftSchema: p.children[0].Schema(),
rightSchema: p.children[1].Schema(),
leftNAJoinKeys: p.LeftNAJoinKeys,
rightNAJoinKeys: p.RightNAJoinKeys,
}
numPairs := helper.estimate()
// For semi-join class, if `OtherConditions` is empty, we already know
// the join results after querying hash table, otherwise, we have to
// evaluate those resulted row pairs after querying hash table; if we
// find one pair satisfying the `OtherConditions`, we then know the
// join result for this given outer row, otherwise we have to iterate
// to the end of those pairs; since we have no idea about when we can
// terminate the iteration, we assume that we need to iterate half of
// those pairs in average.
if p.JoinType == SemiJoin || p.JoinType == AntiSemiJoin ||
p.JoinType == LeftOuterSemiJoin || p.JoinType == AntiLeftOuterSemiJoin {
if len(p.OtherConditions) > 0 {
numPairs *= 0.5
} else {
numPairs = 0
}
}
if hasCostFlag(costFlag, CostFlagUseTrueCardinality) {
numPairs = getOperatorActRows(p)
}
// Cost of querying hash table is cheap actually, so we just compute the cost of
// evaluating `OtherConditions` and joining row pairs.
probeCost := numPairs * cpuFactor
probeDiskCost := numPairs * diskFactor * rowSize
// Cost of evaluating outer filter.
if len(p.LeftConditions)+len(p.RightConditions) > 0 {
// Input outer count for the above compution should be adjusted by SelectionFactor.
probeCost *= SelectionFactor
probeDiskCost *= SelectionFactor
probeCost += probeCnt * cpuFactor
}
diskCost += probeDiskCost
probeCost /= float64(p.Concurrency)
// Cost of additional concurrent goroutines.
cpuCost += probeCost + float64(p.Concurrency+1)*concurrencyFactor
// Cost of traveling the hash table to resolve missing matched cases when building the hash table from the outer table
if p.UseOuterToBuild {
if spill {
// It runs in sequence when build data is on disk. See handleUnmatchedRowsFromHashTableInDisk
cpuCost += buildCnt * cpuFactor
} else {
cpuCost += buildCnt * cpuFactor / float64(p.Concurrency)
}
diskCost += buildCnt * diskFactor * rowSize
}
if spill {
memoryCost *= float64(memQuota) / (rowSize * buildCnt)
} else {
diskCost = 0
}
if op != nil {
setPhysicalHashJoinCostDetail(p, op, spill, buildCnt, probeCnt, cpuFactor, rowSize, numPairs,
cpuCost, probeCost, memoryCost, diskCost, probeDiskCost,
diskFactor, memoryFactor, concurrencyFactor,
memQuota)
}
return cpuCost + memoryCost + diskCost
}
// GetCost computes cost of merge join operator itself.
func (p *PhysicalMergeJoin) GetCost(lCnt, rCnt float64, costFlag uint64) float64 {
outerCnt := lCnt
innerCnt := rCnt
innerKeys := p.RightJoinKeys
innerSchema := p.children[1].Schema()
innerStats := p.children[1].statsInfo()
if p.JoinType == RightOuterJoin {
outerCnt = rCnt
innerCnt = lCnt
innerKeys = p.LeftJoinKeys
innerSchema = p.children[0].Schema()
innerStats = p.children[0].statsInfo()
}
helper := &fullJoinRowCountHelper{
sctx: p.SCtx(),
cartesian: false,
leftProfile: p.children[0].statsInfo(),
rightProfile: p.children[1].statsInfo(),
leftJoinKeys: p.LeftJoinKeys,
rightJoinKeys: p.RightJoinKeys,
leftSchema: p.children[0].Schema(),
rightSchema: p.children[1].Schema(),
}
numPairs := helper.estimate()
if p.JoinType == SemiJoin || p.JoinType == AntiSemiJoin ||
p.JoinType == LeftOuterSemiJoin || p.JoinType == AntiLeftOuterSemiJoin {
if len(p.OtherConditions) > 0 {
numPairs *= 0.5
} else {
numPairs = 0
}
}
if hasCostFlag(costFlag, CostFlagUseTrueCardinality) {
numPairs = getOperatorActRows(p)
}
sessVars := p.ctx.GetSessionVars()
probeCost := numPairs * sessVars.GetCPUFactor()
// Cost of evaluating outer filters.
var cpuCost float64
if len(p.LeftConditions)+len(p.RightConditions) > 0 {
probeCost *= SelectionFactor
cpuCost += outerCnt * sessVars.GetCPUFactor()
}
cpuCost += probeCost
// For merge join, only one group of rows with same join key(not null) are cached,
// we compute average memory cost using estimated group size.
NDV, _ := getColsNDVWithMatchedLen(innerKeys, innerSchema, innerStats)
memoryCost := (innerCnt / NDV) * sessVars.GetMemoryFactor()
return cpuCost + memoryCost
}HashJoin要考虑到内存不够的情况,因此在计算到数据不够时,会将对应的数据压入硬盘。但它对数据的顺序并无要求,因此可以并发的去做。见:
// Cost of traveling the hash table to resolve missing matched cases when building the hash table from the outer table
if p.UseOuterToBuild {
if spill {
// It runs in sequence when build data is on disk. See handleUnmatchedRowsFromHashTableInDisk
cpuCost += buildCnt * cpuFactor
} else {
cpuCost += buildCnt * cpuFactor / float64(p.Concurrency)
}
diskCost += buildCnt * diskFactor * rowSize
}而MergeJoin的代价显然会更小,但能够选则到这个计划也有较高的要求:当两个关联表要 Join 的字段需要按排好的顺序读取时,适用 Merge Join 算法。
5.4 老版本 物理执行计划的选择
5.4.1 代价的评估
这块代码主要是在plan_cost_ver1.go和plan_cost_ver2.go。v2对代价公式进行了更精确的回归校准,调整了部分代价公式,比此前版本的代价公式更加准确。代码上也更为简洁:v2只暴露出了一个公共方法,内部通过不同的类型做转发。
// GetPlanCost returns the cost of this plan.
func GetPlanCost(p PhysicalPlan, taskType property.TaskType, option *PlanCostOption) (float64, error) {
return getPlanCost(p, taskType, option)
}
func getPlanCost(p PhysicalPlan, taskType property.TaskType, option *PlanCostOption) (float64, error) {
if p.SCtx().GetSessionVars().CostModelVersion == modelVer2 {
planCost, err := p.getPlanCostVer2(taskType, option)
return planCost.cost, err
}
return p.getPlanCostVer1(taskType, option)
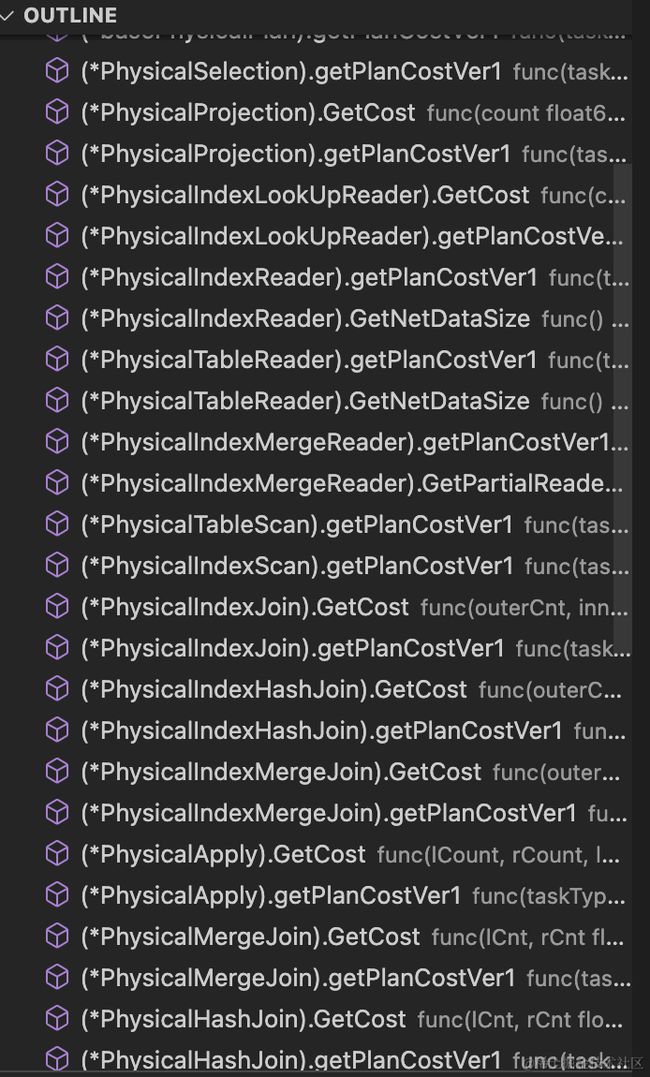
}根据不同的PhysicalPlan类型,会找到不同绑定方法:

v1的部分方法展示:
select代价计算方式
// getPlanCostVer2 returns the plan-cost of this sub-plan, which is:
// plan-cost = child-cost + filter-cost
func (p *PhysicalSelection) getPlanCostVer2(taskType property.TaskType, option *PlanCostOption) (costVer2, error) {
if p.planCostInit && !hasCostFlag(option.CostFlag, CostFlagRecalculate) {
return p.planCostVer2, nil
}
inputRows := getCardinality(p.children[0], option.CostFlag)
cpuFactor := getTaskCPUFactorVer2(p, taskType)
filterCost := filterCostVer2(option, inputRows, p.Conditions, cpuFactor)
childCost, err := p.children[0].getPlanCostVer2(taskType, option)
if err != nil {
return zeroCostVer2, err
}
p.planCostVer2 = sumCostVer2(filterCost, childCost)
p.planCostInit = true
return p.planCostVer2, nil
}这部分代码简单易读。代价就是子查询的代价+筛选的代价。
那么问题来了,中索引的和不中索引的代价应该是不一样的。这里没有体现出来啊。仔细看childCost, err := p.children[0].getPlanCostVer2(taskType, option),这里是会去获取子物理执行计划的代价。
// getPlanCostVer2 returns the plan-cost of this sub-plan, which is:
func (p *PointGetPlan) getPlanCostVer2(taskType property.TaskType, option *PlanCostOption) (costVer2, error) {
if p.planCostInit && !hasCostFlag(option.CostFlag, CostFlagRecalculate) {
return p.planCostVer2, nil
}
if p.accessCols == nil { // from fast plan code path
p.planCostVer2 = zeroCostVer2
p.planCostInit = true
return zeroCostVer2, nil
}
rowSize := getAvgRowSize(p.stats, p.schema.Columns)
netFactor := getTaskNetFactorVer2(p, taskType)
p.planCostVer2 = netCostVer2(option, 1, rowSize, netFactor)
p.planCostInit = true
return p.planCostVer2, nil
}
func netCostVer2(option *PlanCostOption, rows, rowSize float64, netFactor costVer2Factor) costVer2 {
return newCostVer2(option, netFactor,
rows*rowSize*netFactor.Value,
func() string { return fmt.Sprintf("net(%v*rowsize(%v)*%v)", rows, rowSize, netFactor) })
}
// getPlanCostVer2 returns the plan-cost of this sub-plan, which is:
// plan-cost = rows * log2(row-size) * scan-factor
// log2(row-size) is from experiments.
func (p *PhysicalTableScan) getPlanCostVer2(taskType property.TaskType, option *PlanCostOption) (costVer2, error) {
if p.planCostInit && !hasCostFlag(option.CostFlag, CostFlagRecalculate) {
return p.planCostVer2, nil
}
rows := getCardinality(p, option.CostFlag)
var rowSize float64
if p.StoreType == kv.TiKV {
rowSize = getAvgRowSize(p.stats, p.tblCols) // consider all columns if TiKV
} else { // TiFlash
rowSize = getAvgRowSize(p.stats, p.schema.Columns)
}
rowSize = math.Max(rowSize, 2.0)
scanFactor := getTaskScanFactorVer2(p, p.StoreType, taskType)
p.planCostVer2 = scanCostVer2(option, rows, rowSize, scanFactor)
// give TiFlash a start-up cost to let the optimizer prefers to use TiKV to process small table scans.
if p.StoreType == kv.TiFlash {
p.planCostVer2 = sumCostVer2(p.planCostVer2, scanCostVer2(option, 10000, rowSize, scanFactor))
}
p.planCostInit = true
return p.planCostVer2, nil
}
func scanCostVer2(option *PlanCostOption, rows, rowSize float64, scanFactor costVer2Factor) costVer2 {
if rowSize < 1 {
rowSize = 1
}
return newCostVer2(option, scanFactor,
// rows * log(row-size) * scanFactor, log2 from experiments
rows*math.Log2(rowSize)*scanFactor.Value,
func() string { return fmt.Sprintf("scan(%v*logrowsize(%v)*%v)", rows, rowSize, scanFactor) })
}scanFactor的代价默认是40.7,netFactor的代价默认是3.96。结合代码来看,命中索引的代价更优。
join代价计算方式
// getPlanCostVer2 returns the plan-cost of this sub-plan, which is:
// plan-cost = build-child-cost + build-filter-cost +
// (probe-cost + probe-filter-cost) / concurrency
// probe-cost = probe-child-cost * build-rows / batchRatio
func (p *PhysicalIndexJoin) getPlanCostVer2(taskType property.TaskType, option *PlanCostOption) (costVer2, error) {
return p.getIndexJoinCostVer2(taskType, option, 0)
}
func (p *PhysicalIndexHashJoin) getPlanCostVer2(taskType property.TaskType, option *PlanCostOption) (costVer2, error) {
return p.getIndexJoinCostVer2(taskType, option, 1)
}
func (p *PhysicalIndexMergeJoin) getPlanCostVer2(taskType property.TaskType, option *PlanCostOption) (costVer2, error) {
return p.getIndexJoinCostVer2(taskType, option, 2)
}
func (p *PhysicalIndexJoin) getIndexJoinCostVer2(taskType property.TaskType, option *PlanCostOption, indexJoinType int) (costVer2, error) {
if p.planCostInit && !hasCostFlag(option.CostFlag, CostFlagRecalculate) {
return p.planCostVer2, nil
}
build, probe := p.children[1-p.InnerChildIdx], p.children[p.InnerChildIdx]
buildRows := getCardinality(build, option.CostFlag)
buildRowSize := getAvgRowSize(build.Stats(), build.Schema().Columns)
probeRowsOne := getCardinality(probe, option.CostFlag)
probeRowsTot := probeRowsOne * buildRows
probeRowSize := getAvgRowSize(probe.Stats(), probe.Schema().Columns)
buildFilters, probeFilters := p.LeftConditions, p.RightConditions
probeConcurrency := float64(p.ctx.GetSessionVars().IndexLookupJoinConcurrency())
cpuFactor := getTaskCPUFactorVer2(p, taskType)
memFactor := getTaskMemFactorVer2(p, taskType)
requestFactor := getTaskRequestFactorVer2(p, taskType)
buildFilterCost := filterCostVer2(option, buildRows, buildFilters, cpuFactor)
buildChildCost, err := build.getPlanCostVer2(taskType, option)
if err != nil {
return zeroCostVer2, err
}
buildTaskCost := newCostVer2(option, cpuFactor,
buildRows*10*cpuFactor.Value,
func() string { return fmt.Sprintf("cpu(%v*10*%v)", buildRows, cpuFactor) })
startCost := newCostVer2(option, cpuFactor,
10*3*cpuFactor.Value,
func() string { return fmt.Sprintf("cpu(10*3*%v)", cpuFactor) })
probeFilterCost := filterCostVer2(option, probeRowsTot, probeFilters, cpuFactor)
probeChildCost, err := probe.getPlanCostVer2(taskType, option)
if err != nil {
return zeroCostVer2, err
}
var hashTableCost costVer2
switch indexJoinType {
case 1: // IndexHashJoin
hashTableCost = hashBuildCostVer2(option, buildRows, buildRowSize, float64(len(p.RightJoinKeys)), cpuFactor, memFactor)
case 2: // IndexMergeJoin
hashTableCost = newZeroCostVer2(traceCost(option))
default: // IndexJoin
hashTableCost = hashBuildCostVer2(option, probeRowsTot, probeRowSize, float64(len(p.LeftJoinKeys)), cpuFactor, memFactor)
}
// IndexJoin executes a batch of rows at a time, so the actual cost of this part should be
// `innerCostPerBatch * numberOfBatches` instead of `innerCostPerRow * numberOfOuterRow`.
// Use an empirical value batchRatio to handle this now.
// TODO: remove this empirical value.
batchRatio := 6.0
probeCost := divCostVer2(mulCostVer2(probeChildCost, buildRows), batchRatio)
// Double Read Cost
doubleReadCost := newZeroCostVer2(traceCost(option))
if p.ctx.GetSessionVars().IndexJoinDoubleReadPenaltyCostRate > 0 {
batchSize := float64(p.ctx.GetSessionVars().IndexJoinBatchSize)
taskPerBatch := 1024.0 // TODO: remove this magic number
doubleReadTasks := buildRows / batchSize * taskPerBatch
doubleReadCost = doubleReadCostVer2(option, doubleReadTasks, requestFactor)
doubleReadCost = mulCostVer2(doubleReadCost, p.ctx.GetSessionVars().IndexJoinDoubleReadPenaltyCostRate)
}
p.planCostVer2 = sumCostVer2(startCost, buildChildCost, buildFilterCost, buildTaskCost, divCostVer2(sumCostVer2(doubleReadCost, probeCost, probeFilterCost, hashTableCost), probeConcurrency))
p.planCostInit = true
return p.planCostVer2, nil
}关键在于:
switch indexJoinType {
case 1: // IndexHashJoin
hashTableCost = hashBuildCostVer2(option, buildRows, buildRowSize, float64(len(p.RightJoinKeys)), cpuFactor, memFactor)
case 2: // IndexMergeJoin
hashTableCost = newZeroCostVer2(traceCost(option))
default: // IndexJoin
hashTableCost = hashBuildCostVer2(option, probeRowsTot, probeRowSize, float64(len(p.LeftJoinKeys)), cpuFactor, memFactor)
}对应方法:
func hashBuildCostVer2(option *PlanCostOption, buildRows, buildRowSize, nKeys float64, cpuFactor, memFactor costVer2Factor) costVer2 {
// TODO: 1) consider types of keys, 2) dedicated factor for build-probe hash table
hashKeyCost := newCostVer2(option, cpuFactor,
buildRows*nKeys*cpuFactor.Value,
func() string { return fmt.Sprintf("hashkey(%v*%v*%v)", buildRows, nKeys, cpuFactor) })
hashMemCost := newCostVer2(option, memFactor,
buildRows*buildRowSize*memFactor.Value,
func() string { return fmt.Sprintf("hashmem(%v*%v*%v)", buildRows, buildRowSize, memFactor) })
hashBuildCost := newCostVer2(option, cpuFactor,
buildRows*cpuFactor.Value,
func() string { return fmt.Sprintf("hashbuild(%v*%v)", buildRows, cpuFactor) })
return sumCostVer2(hashKeyCost, hashMemCost, hashBuildCost)
}
func newZeroCostVer2(trace bool) (ret costVer2) {
if trace {
ret.trace = &costTrace{make(map[string]float64), ""}
}
return
}简单的看一下代码,我们可以发现,从大多数的场景来看,按照代价从小到大来排,这几种Join是MergeJoin 总得来说这块代码较为简单,本质就是枚举所有符合条件的物理执行计划,并挑选出代价最小的执行计划,故不再列举代码。有兴趣的同学可以根据以下大纲自行翻阅: 数据库引擎执行器中非常出名的两种优化方式,code generation和 vectorized execution。 code generation主要是根据上下文来生成一整段优化过的代码,这与那种嵌套大量if...else、for循环、虚方法的代码完全相反,完全面向性能考虑。 vectorized execution基于拉模型。相比于一次拉一个tuple来说,它的批量拉取减少了多次拉取的开销,同时还可以使用到SIMD。基于这种场景,vectorized execution的优化更加适用于列式数据库。5.4.2执行计划枚举与择优
|--planner/core/find_best_task.go
\-- findBestTask
\-- enumeratePhysicalPlans4Task
\-- compareTaskCost
\-- getTaskPlanCost
|-- planner/core/plan_cost_ver2.go
\-- getPlanCost6.其他
6.1 参考与引用的文章
6.2 知识补充:code generation && vectorized execution