双目+IMU标定详细流程、相关文件格式说明分析【T265为例】
最近做一个无人机避障的项目,无人机上面安装了机载电脑,通过笔记本电脑进入机载电脑的桌面,使用提前写好地脚本运行VIO、路径规划、飞控和相机启动,在RVIZ中观察建图、定位和航迹点,并通过鼠标在地图上设置目标点,无人机即可自主前往。
本文主要描述一下机载传感器T265的远程标定流程,供日后参考:
一、基本情况
二、具体操作
1、录制并标定imu(realsense的launch文件已经修改好,环境也都配置好了)
2、录制双目与联合标定所需bag
3、kalibr做双目标定
4、kalibr做联合标定
5、标定完成
6、参考文章
一、基本情况
1)注意:本文是只是提纲式的描述了关键步骤和代码,我还写了一个D455远程标定的文章,感兴趣的话可以看看:D455远程标定详细步骤,使用kalibr、imu_utils两个开源工具_全日制学生混的博客-CSDN博客
2)笔记本电脑和机载电脑通过外置天线互联,通过ifconfig可以查找到地址
3)可以使用ssh或Nomachine进入机载电脑,这里为了可视化,我使用了后者
4)基本思路是:无人机录制bag,然后用无线传输把bag传到主机中运行标定程序,将标定结果再放到机载电脑的程序里(这样确实繁琐,但是在此项目中,考虑到批量部署和网络原因,这是目前我能找到的最好方法)
5)一些基本命令:april_6x6.yaml
sudo apt install net-tools //网络工具
ifconfig //找到飞机的ip地址
ssh [email protected] //查看远程命令窗口
ping 192.168.168.165 //查看延迟
scp [email protected]:/home/a/Downloads/autoFlight-master.zip . //拷贝文件到当前文件夹
rs-enumerate-devices -c //查看相机出厂标定参数6)标定板文件格式:
#example for aprilgrid
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.088 #size of apriltag, edge to edge [m]
tagSpacing: 0.3 #ratio of space between tags to tagSize
#example: tagSize=2m, spacing=0.5m --> tagSpacing=0.25[-]
#example for checkerboard
# targetType: 'checkerboard' #gridtype
# targetCols: 6 #number of internal chessboard corners
# targetRows: 7 #number of internal chessboard corners
# rowsMetricSize: 0.06 #size of one chessboard square [m]
# colsMetricSize: 0.06 #size of one chessboard square [m]
7) rs_t265.launch文件(更改发布话题、时间戳合并后)
二、具体操作
1、录制并标定imu(realsense的launch文件已经修改好,环境也都配置好了)
注意,在标定imu时,播放bag是可以加速的,不要傻乎乎的在机载电脑上录2h,然后再在笔记本电脑上再播放两个小时。加速的倍数根据你的电脑配置做调整,我的笔记本(拯救者r9000p)播放到1000倍速都没问题的。
//录制
rosbag record /imu/data -o imu_uav.bag –duration=2h
scp [email protected]:/home/a/imu_uav.bag . 拷贝bag到主机
//启动标定程序
roslaunch imu_utils t265_imu.launch
rosbag play -r 100 imu_uav.bag 一百倍速度播放
//参考链接
https://blog.csdn.net/CGJustDoIT/article/details/108081840
2、录制双目与联合标定所需bag
需要提前改好rs_t265.launch 主要更改:鱼眼相机话题发布、imu_unit => copy(imu标定的时候是linear..),把同步打开
录制bag的时候加了一个duration参数,因为我一个人标定,点鼠标之后再拿起无人机标定,然后再放下无人机点退出录制有些手忙脚乱,所以就直接限定了录制时间,然后在kalibr做标定的时候,只需要使用 “--bag-from-to 10 95” 掐头去尾即可。
// 修改发布频率和话题名称:
rosrun topic_tools throttle messages /camera/fisheye1/image_raw 20.0 /fisheye1
rosrun topic_tools throttle messages /camera/fisheye2/image_raw 20.0 /fisheye2
rosrun topic_tools throttle messages /camera/imu 200.0 /imu
//录制
rosbag record -O imu_cameras_calibration /fisheye1 /fisheye2 /imu -duration=100
//拷贝过来
scp [email protected]:/home/a/workspace/uav_ws/imu_cameras_calibration.bag .
//至此就没有机载电脑什么事了,标定程序就在笔记本电脑上启动了
//到时候只需要把标定结果放到机载电脑里就行3、kalibr做双目标定
下面这行命令处理最基本的语句,还加了修饰:显示提取过程、增加对于不同步时间戳的容忍程度;关于这个容忍程度,加它的原因是,我们的双目相机两帧图像不是完全对齐的,所以要加一个,如果你的相机不加就能对齐那就不加,即使加了,你也不要把这个容忍程度改的太宽,否则会导致相隔几帧的左右目图像匹配到一起,轻则误差大,重则标定不收敛。
rosrun kalibr kalibr_calibrate_cameras --target ./april_6x6.yaml --bag ./imu_cameras_calibration.bag --bag-from-to 10 95 --models omni-radtan omni-radtan --topics /fisheye1 /fisheye2 --approx-sync 0.04 -show-extraction4、kalibr做联合标定
单独标定了IMU和双目后,接下来就是标定一下二者之间的外参,这一步需要把之前的标定结果放到这一步的执行目录中。需要注意的是,相机的标定输出结果(那个.yaml文件)可以直接拿来用,而IMU的标定由于用的是imu_utils,需要把结果整理成kalibr能够识别的格式。
rosrun kalibr kalibr_calibrate_imu_camera --target ./april_6x6.yaml --cam ./imu_cameras_calibration-camchain.yaml --imu ./imu.yaml --bag ./imu_cameras_calibration.bag --bag-from-to 10 95 --show-extraction5、标定完成
标定结束后,就可以得到IMU、双目和联合的参数
图 标定时的界面

图 相机标定结果
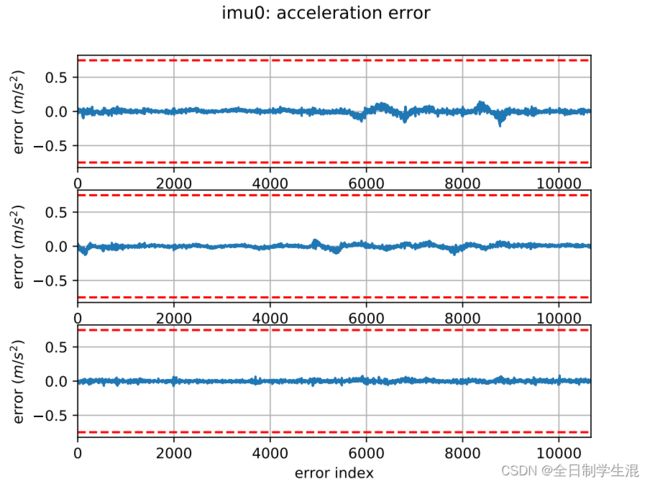
图IMU标定结果
6、参考文章
1:https://www.jianshu.com/p/194d6c9ef9a4
2:bmi055 标定_Ubuntu16.04+RealsenseT265跑通VINS-Fusion_之死的博客-CSDN博客
3:Kalibr 之 Camera-IMU 标定 (总结)_晨光ABC的博客-CSDN博客_kalibr标定
4:双目相机与IMU联合标定_合工大机器人实验室的博客-CSDN博客_双目相机和imu联合标定
5:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
6:Intel Realsense T265使用教程_熊猫飞天的博客-CSDN博客_t265