Linux组件之线程池
目录
- 一、线程池的概念
- 二、线程池的核心组件
- 三、数据结构设计
-
- 1、任务队列
- 2、线程池
- 四、接口设计
-
- 1、创建线程池
- 2、销毁线程池
- 3、抛出任务的接口
- 五、实现一个线程池及测试
-
- 1、测试单生成者——多消费者
- 2、测试多生产者——多消费者
- 3、thrd_pool.h
- 4、thrd_pool.c
- 5、main.c
- 6、thrdpool_test.cc
一、线程池的概念
业务开发过程中,如果遇到某些耗时特别严重的任务,我们会想着把它们抛给其他线程进行异步处理。但是线程频繁的创建与销毁,会造成大量的系统开销。因此,我们希望有一些备用线程,需要时候从中取出,不需要的时候等待休眠。这就引出了线程池的概念 —— 线程池是管理维持固定数量线程 的池式结构。
(1)总结一下,为什么需要线程池?
某些任务特别耗时,严重影响该线程处理其他任务,但又不想频繁创建销毁线程,就需要把这些任务抛给线程池进行异步处理。这样可以异步执行耗时任务,复用线程资源,充分利用系统资源。
(2)为什么是固定数量呢?
这是因此线程作为系统资源,需要系统进行调度,并不是越多越好。随着线程数量的增加,由于系统戏院的限制,不再带来性能的提升,反而是负担。
就好比一个老师能管理的学生数量也是有限的,超过了这个界限,效果反而会下降。
(3)如何决定数量呢?
这得根据任务进行区分。如果是CPU密集型,一般等于CPU核心数;如果是I/O密集型,一般是2倍的CPU核心数。
经验公式: ( I / O 等待时间 + C P U 运算时间 ) × 核心数 C P U 运算时间 \frac{(I/O等待时间+CPU运算时间)\times 核心数}{CPU运算时间} CPU运算时间(I/O等待时间+CPU运算时间)×核心数
二、线程池的核心组件
首先,线程池是属于生产消费模型。因此,线程池运行环境构成:1)生产者线程:发布任务;2)消费者线程:取出任务,执行任务
其次,我们需要有一个任务队列,存储任务结点,其中包括异步执行任务的上下文、执行函数等,起到联系生产者线程和消费者线程的作用。
另外,生产者不一定时时刻刻都有任务,如果当生产者不发布任务时,消费者线程还在空转等待,那就特别浪费系统资源。因此,需要设计一个机制来调度消费者:
1)当有任务进来时,会唤醒消费者线程,取出并执行任务。
2)当没有任务时,让消费者线程进行休眠,让出执行权。
由于任务队列是生产者线程和消费者线程的桥梁,因此这个调度工作当仁不让安排给任务队列。
因此,就有了线程池的三个核心组件:
1)生产者线程:发布任务,通知一个消费者线程需要唤醒;
2)任务队列:存储任务结点,其中包括异步执行任务的上下文、执行函数等;调度线程池的状态(唤醒 or 休眠),通过锁的方式。
3)消费者线程:取出任务,执行任务。
线程池的运行流程
1)首先存在生产者线程。然后启动若干个消费者线程,交由线程池进行管理。一开始没有任务,消费者线程处于休眠状态。
2)出现一个耗时严重的任务,生产者将其加入到任务队列。
3)任务队列唤醒消费者线程,消费者线程从队列取出任务,并执行。
4)再次检查任务队列,有任务再次唤醒消费者线程取出执行。没有任务,就让消费者线程休眠。
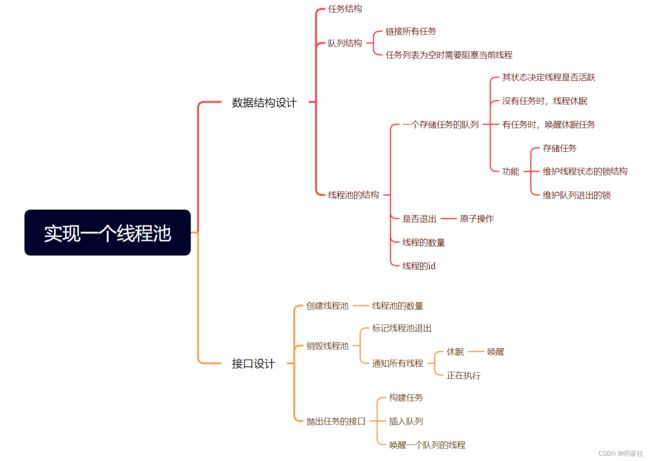
三、数据结构设计
1、任务队列
//任务队列的结点
typedef struct task_s {
task_t *next; //指向下一个任务的指针
handler_pt func; //任务的执行函数
void *arg; //任务的上下文
} task_t;
//任务队列
//默认是阻塞类型的队列,谁来取任务,如果此时队列为空,谁应该阻塞休眠
typedef struct task_queue_s {
void *head; //头指针
void **tail; //指向队尾的指针的指针
int block; //设置当前是否阻塞类型
spinlock_t lock;
pthread_mutex_t mutex;
pthread_cond_t cond;
} task_queue_t;
这边需要着重介绍一下**tail,先看下面两个
task_t *p : p用于存储指向 task_t 对象的地址,因此p占8个字节,*p占24个字节。
task_t **q:q用于存储指向 task_t* 类型指针的地址,task_t* 类型指针占8个字节.
也就是指向task_t结构体中前8个字节的区域,因此*q == task->next。
也就是说,p和q虽然都指向的是task_t,但是q是指针的指针,因此存储的是 task_t* 类型指针(task_t前8个字节的区域)的地址。

2、线程池
struct thrdpool_s {
task_queue_t *task_queue;
atomic_int quit; //标志是否让线程退出
int thrd_count; //线程的数量
pthread_t *thread;
};
四、接口设计
接口设计是暴露给用户使用的,但隐藏具体的实现细节。
接口设计的细节请看第五节代码thrd_pool.c部分的注释
1、创建线程池
thrdpool_t *thrdpool_create(int thrd_count);
2、销毁线程池
int thrdpool_post(thrdpool_t *pool, handler_pt func, void *arg);
3、抛出任务的接口
void thrdpool_terminate(thrdpool_t * pool);
void thrdpool_waitdone(thrdpool_t *pool);
五、实现一个线程池及测试
1、测试单生成者——多消费者
生成动态链接库
gcc -c -fPIC thrd_pool.c
gcc -shared thrd_pool.o -o libthrd_pool.so -I/. -lpthread
gcc -Wl,-rpath=./ main.c -o main -I./ -L./ -lthrd_pool -lpthread
./main

2、测试多生产者——多消费者
g++ -Wl,-rpath=./ thrdpool_test.cc -o thrdpool_test -I./ -L./ -lthrd_pool -lpthread
./thrdpool_test
![]()
3、thrd_pool.h
#ifndef _THREAD_POOL_H
#define _THREAD_POOL_H
typedef struct thrdpool_s thrdpool_t;
typedef void (*handler_pt)(void *);
#ifdef __cplusplus
extern "C"
{
#endif
// 对称处理
thrdpool_t *thrdpool_create(int thrd_count);
void thrdpool_terminate(thrdpool_t * pool);
int thrdpool_post(thrdpool_t *pool, handler_pt func, void *arg);
void thrdpool_waitdone(thrdpool_t *pool);
#ifdef __cplusplus
}
#endif
#endif
4、thrd_pool.c
#include 5、main.c
#include 6、thrdpool_test.cc
#include "thrd_pool.h"
#include