基于HAL库STM32串口驱动不定长数据接收
STM32串口驱动不定长数据接收带环形缓冲区
- 最新框架代码
- 使用方法
- 源码
-
- 串口接口文件
- 环形缓冲区接口文件
- 移植图示
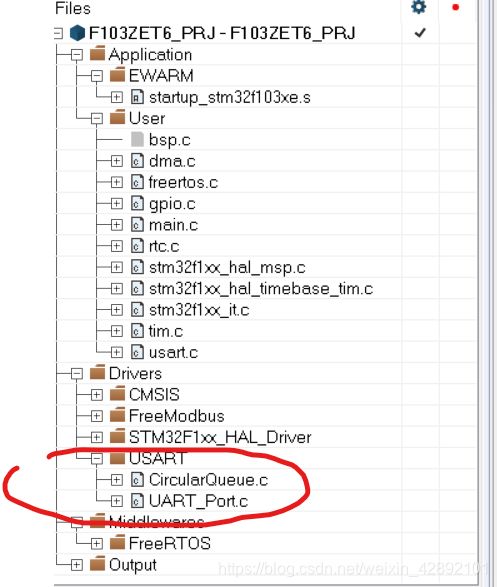
使用涉及4个文件, UART_Port.c UART_Port.h CircularQueue.h CircularQueue.c
最新框架代码
2022年10月25日更新:https://github.com/aron566/Serial_Port.git
使用方法
1、在配置串口中使能DMA传输 ,全局中断
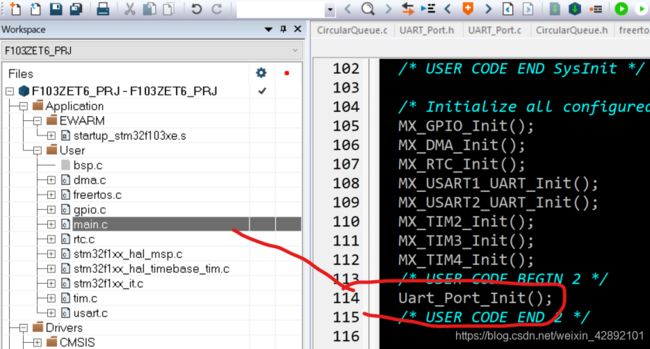
2、在串口初始化完成后调用Uart_Port_Init();
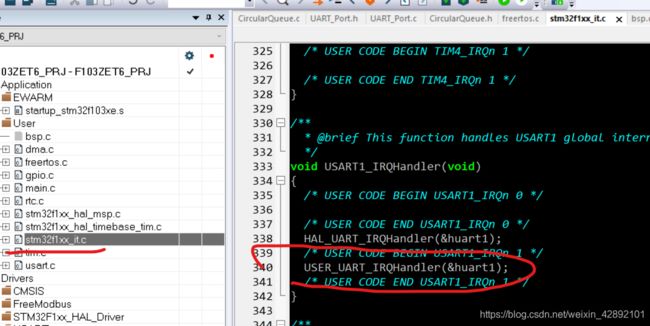
3、在串口中断服务函数中调用USER_UART_IRQHandler(UART_HandleTypeDef *huart);
4、获取数据接口,请查看CircularQueue.h提供的缓冲区提取数据接口
5、注意事项:malloc无法申请内存的需调整堆栈大小,或者调整缓冲区大小
源码
串口接口文件
PS:默认使用串口1作为调试回环打印接口
需调整宏定义DEBUG_UART USE_LOOPBACK
/*
* FILE: UART_Port.c
*
* Created on: 2020/2/22
*
* Author: aron66
*
* DESCRIPTION:--
*/
#ifdef __cplusplus //use C compiler
extern "C" {
#endif
#include "UART_Port.h"/*外部接口*/
#define USE_LOOPBACK 1
#define DEBUG_UART &huart1
/* External variables --------------------------------------------------------*/
extern UART_HandleTypeDef huart1;
extern UART_HandleTypeDef huart2;
extern UART_HandleTypeDef huart3;
extern UART_HandleTypeDef huart4;
extern UART_HandleTypeDef huart5;
extern UART_HandleTypeDef huart6;
extern DMA_HandleTypeDef hdma_usart1_rx;
extern DMA_HandleTypeDef hdma_usart1_tx;
extern DMA_HandleTypeDef hdma_usart2_rx;
extern DMA_HandleTypeDef hdma_usart2_tx;
extern DMA_HandleTypeDef hdma_usart3_rx;
extern DMA_HandleTypeDef hdma_usart3_tx;
extern DMA_HandleTypeDef hdma_usart4_rx;
extern DMA_HandleTypeDef hdma_usart4_tx;
extern DMA_HandleTypeDef hdma_usart5_rx;
extern DMA_HandleTypeDef hdma_usart5_tx;
extern DMA_HandleTypeDef hdma_usart6_rx;
extern DMA_HandleTypeDef hdma_usart6_tx;
static uint8_t get_uart_index(USART_TypeDef *Instance);
static Uart_Dev_info_t *Create_Uart_Dev(Uart_num_t uart_num ,UART_HandleTypeDef *huart ,DMA_HandleTypeDef *hdma_rx ,uint16_t rx_temp_size ,uint32_t rxsize ,int work_mode ,osSemaphoreId *pRX_Sem);
/*预定义串口设备信息*/
Uart_Dev_info_t *Uart_pDevice[UART_MAX_NUM+1];
/**
******************************************************************
* @brief 初始化串口设备信息
* @author aron66
* @version v1.0
* @date 2020/3/15
******************************************************************
*/
void Uart_Port_Init(void)
{
Uart_pDevice[UART_NUM_1] = Create_Uart_Dev(UART_NUM_1 ,&huart1 ,&hdma_usart1_rx ,128 ,128 ,0 ,NULL);
Uart_pDevice[UART_NUM_2] = Create_Uart_Dev(UART_NUM_2 ,&huart2 ,&hdma_usart2_rx ,128 ,128 ,0 ,NULL);
}
/**
******************************************************************
* @brief 建立串口设备,为其建立双缓冲区-->使能串口空闲中断
* @param 串口号 串口设备指针 dma操作地址 ,临时缓冲大小 接收队列大小 工作模式 二值信号量(适用于带FreeRTOS操作系统的工程)
* @author aron66
* @version v1.0
* @date 2020/3/15
******************************************************************
*/
static Uart_Dev_info_t *Create_Uart_Dev(Uart_num_t uart_num ,UART_HandleTypeDef *huart ,DMA_HandleTypeDef *hdma_rx ,uint16_t rx_temp_size ,uint32_t rxsize ,int work_mode ,osSemaphoreId *pRX_Sem)
{
Uart_Dev_info_t *pUart_Dev = (Uart_Dev_info_t *)malloc(sizeof(Uart_Dev_info_t));
pUart_Dev->phuart = huart;
pUart_Dev->phdma_rx = hdma_rx;
pUart_Dev->cb = cb_create(rxsize);
pUart_Dev->MAX_RX_Temp = rx_temp_size;
pUart_Dev->RX_Buff_Temp = (uint8_t *)malloc(sizeof(uint8_t)*rx_temp_size);
if(NULL == pUart_Dev->RX_Buff_Temp)
{
return NULL;
}
pUart_Dev->Is_Half_Duplex = work_mode;
pUart_Dev->pRX_Sem = pRX_Sem;
//打开空闲中断
__HAL_UART_ENABLE_IT(huart,UART_IT_IDLE);
//使能DMA接收
HAL_UART_Receive_DMA(huart, pUart_Dev->RX_Buff_Temp, pUart_Dev->MAX_RX_Temp);
return pUart_Dev;
}
/************************************************************
* @brief Rx Transfer IRQ
* @param huart UART handle.
* @return None
* @author aron66
* @date 2020/3/15
* @version v1.0
* @note @@
***********************************************************/
void USER_UART_IRQHandler(UART_HandleTypeDef *huart)
{
uint8_t index = get_uart_index(huart->Instance);
if(index != 0)
{
if((__HAL_UART_GET_FLAG(Uart_pDevice[index]->phuart ,UART_FLAG_IDLE) != RESET))
{
/*
首先停止DMA传输,
1.防止后面又有数据接收到,产生干扰,因为此时的数据还未处理。
2.DMA需要重新配置。
*/
HAL_UART_DMAStop(Uart_pDevice[index]->phuart);
/*清楚空闲中断标志,否则会一直不断进入中断*/
__HAL_UART_CLEAR_IDLEFLAG(Uart_pDevice[index]->phuart);
/*计算本次接收数据长度*/
uint32_t data_length = Uart_pDevice[index]->MAX_RX_Temp - __HAL_DMA_GET_COUNTER(Uart_pDevice[index]->phdma_rx);
/*将数据记录至环形区*/
CQ_putData(Uart_pDevice[index]->cb ,Uart_pDevice[index]->RX_Buff_Temp ,(uint32_t)data_length);
#if USE_LOOPBACK
HAL_UART_Transmit(DEBUG_UART, (uint8_t *)Uart_pDevice[index]->RX_Buff_Temp,(uint16_t)data_length,0xFFFF);
#endif
/*清空临时缓冲区*/
memset(Uart_pDevice[index]->RX_Buff_Temp ,0 ,data_length);
data_length = 0;
/*打开空闲中断*/
__HAL_UART_ENABLE_IT(Uart_pDevice[index]->phuart ,UART_IT_IDLE);
/*重启开始DMA传输*/
HAL_UART_Receive_DMA(Uart_pDevice[index]->phuart ,Uart_pDevice[index]->RX_Buff_Temp, Uart_pDevice[index]->MAX_RX_Temp);
}
}
}
/*获得当前串口信息索引*/
static uint8_t get_uart_index(USART_TypeDef *Instance)
{
uint8_t index = 0;
for(;index < UART_MAX_NUM+1;index++)
{
if(Uart_pDevice[index]->phuart->Instance == Instance)
{
return index;
}
}
return 0;
}
#if (USE_NEW_REDIRECT == 0)
#include "stdio.h"
/*************************************************
* 函数功能: 重定向c库函数printf到HAL_UART_Transmit
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(DEBUG_UART, (uint8_t *)&ch, 1, 10);//原来使用阻塞式传输
return ch;
}
/**
* 函数功能: 重定向c库函数getchar,scanf
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fgetc(FILE * f)
{
uint8_t ch = 0;
while(HAL_UART_Receive(DEBUG_UART,&ch, 1, 0xffff)!=HAL_OK);
return ch;
}
#else
/*新式重定向*/
#include "stdio.h"
int __io_putchar(int ch)
{
HAL_UART_Transmit(DEBUG_UART ,()uint8_t)&ch ,1 ,0xFFFF);
return ch;
}
int __write(int file, char *ptr, int len)
{
int DataIdx;
for(DataIdx = 0; DataIdx < len; DataIdx++)
{
__io_putchar(*ptr++);
}
return len;
}
#endif
#ifdef __cplusplus //end extern c
}
#endif
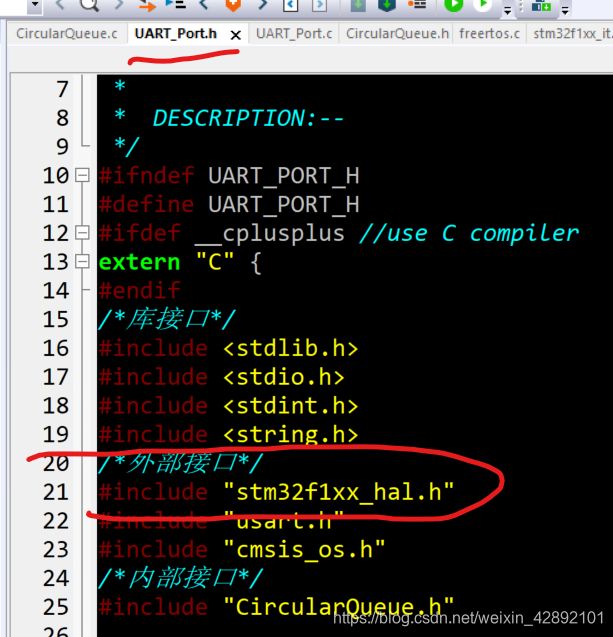
UART_Port.h文件
/*
* FILE: UART_Port.h
*
* Created on: 2020/2/22
*
* Author: aron566
*
* DESCRIPTION:--
*/
#ifndef UART_PORT_H
#define UART_PORT_H
#ifdef __cplusplus //use C compiler
extern "C" {
#endif
/*库接口*/
#include 环形缓冲区接口文件
CircularQueue.c文件
/**
* @file CircularQueue.c
*
* @date 2020/6/25
*
* @author aron566
*
* @copyright None
*
* @brief None
*
* @details None
*
* @version v1.1
*/
#ifdef __cplusplus ///
extern "C" {
#endif
/** Includes -----------------------------------------------------------------*/
/* Private includes ----------------------------------------------------------*/
#include "CircularQueue.h"
#if USE_LINUX_SYSTEM
#include CircularQueue.h文件
/**
* @file CircularQueue.h
*
* @date 2020/6/25
*
* @author aron566
*
* @brief None
*
* @version v1.1
*/
#ifndef CIRCULARQUEUE_H_
#define CIRCULARQUEUE_H_
#ifdef __cplusplus ///
extern "C" {
#endif
/** Includes -----------------------------------------------------------------*/
#include 移植图示
1、加入接口代码文件至工程
2、确定自己的平台库文件
3、加入串口中断服务接口处理方法
4、main.c初始化代码加入
5、测试结果

参考博客:https://blog.csdn.net/jiejiemcu/article/details/82743945