GNN框架优化GNNAdvisor: An Adaptive and Efficient Runtime System for GNN Acceleration on GPUs
OSDI’21
Abstract
GNNAdvisor
- 从GNN模型和输入图中寻找与性能相关的特征,作为优化点
- 实现为GNN计算定制的2D工作负载管理,提升GPU利用率和性能
- 利用GPU内存结构,根据GPU内存结构和GNN工作负载的特点协调GNN的执行
- 为了实现自动优化,继承了一个轻量级的分析模型进行参数搜索
1. Introduction
目前,支持GNN训练和推理的工作可以分为两类:
- 图处理系统,融合神经操作
- 神经网络框架,扩展支持基于向量的图操作
但都是初步的、不完善的,有三个方面的缺陷:
- 没有利用GNN的输入信息:GNN模型有不同的层序列、聚合函数的类型、特征向量的维度,输入的图数据也有不同特征。现在的GNN框架(pyg, neugraph, dgl),采用的是一刀切的优化模式,无法最大化优化特定GNN应用
- 没有针对GNN的优化:更新阶段的NN操作是密集的、访存规律的,但聚合阶段的图操作是稀疏的、访存不规律的。当前的GNN框架的图操作来自图处理系统,针对的是标量属性,而GNN中每个节点都有一个embedding,因此应在embedding上积极利用并行。
- 对于不同输入,缺乏适应性的运行时支持:之前的GNN框架依赖python编程接口,使用编译器进行静态优化,但是GNN的一些特征在运行时才会显现出来(比如向量大小、节点度数),因此需要运行时优化。
提出GNNAdvisor
GNNAdvisor使用Pytorch作为前端,在底层是用CUDA写的,并用pytorch wrapper集成到pytorch里面。它可以被看作是具有kernel优化、运行时支持的operator
使用GNNAdvisor实现的两层GCN如下:
import GNNAdvisor as GNNA
import torch
# create a GCN class
class GCN(torch.nn.Module):
def __init__(self, inDim, hiDim, outDim, nLayers):
self.layers = torch.nn.ModuleList()
self.layers.append(GNNA.GCNConv(inDim, hiDim))
for i in range(nLayers - 2):
layer = GNNA.GCNConv(hiDim, hiDim)
self.layers.append(layer)
self.layers.append(GNNA.GCNConv(hiDim, outDim))
self.softmax = torch.nn.Softmax()
def forward(self, X, graph, param):
for i in range(len(self.layers)):
X = self.layers[i](X, graph, param)
X = self.ReLU(X)
X = self.softmax(X)
return X
# define a 2-layer GCN model
model = GCN(inDim=100, hiDim=16, outDim=10, nLayers=2)
# loading graph and extracting input properties
graphObj, inputInfo = GNNA.LoaderExtractor(graphFile, model)
# set runtime parameters automatically
X, graph, param = GNNA.Decider(graphObj, inputInfo)
# run model
predict_y = model(X, graph, param)
# compute loss and accuracy
# gradient backpropagation for training

贡献:
- 第一个提出了分析输入(模型、图数据)的特征
- 提出了具有参数的针对GNN的系统优化:2D工作负载管理、针对GNN的内存优化。并结合分析建模和参数自动选择,去简化搜索空间
- DGL 3.02X NeuGraph 4.36X
2. Background and Related Work
2.1 Graph Neural Network
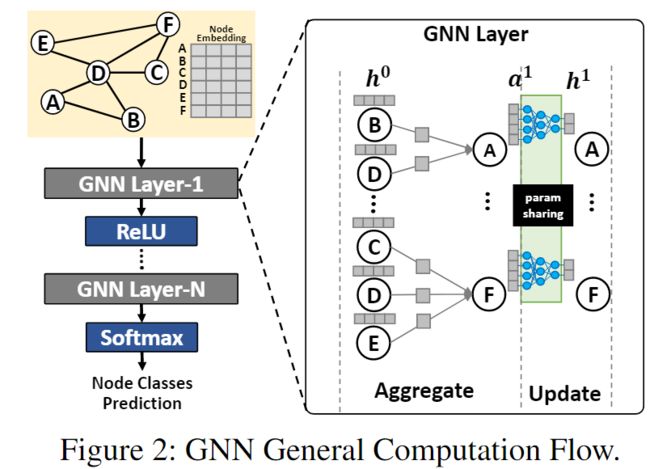
GNN计算节点v在第k+1层的embedding的公式如下:
a v k + 1 = A g g r e g a t e ( k + 1 ) ( h u k ∣ u ∈ N ( v ) ∪ h v k ) h v k + 1 = U p d a t e ( k + 1 ) ( a v k + 1 ) a_v^{k+1}=Aggregate^{(k+1)}(h_u^k|u\in{N(v)\cup{h_v^k}}) \\ h_v^{k+1}=Update^{(k+1)}(a_v^{k+1}) avk+1=Aggregate(k+1)(huk∣u∈N(v)∪hvk)hvk+1=Update(k+1)(avk+1)
其中, a v k + 1 a_v^{k+1} avk+1表示聚合了邻居信息(比如邻居的embedding)之后的结果, h u k h_u^k huk表示节点u在第k层的embedding, N ( v ) N(v) N(v)表示节点v的邻居节点
Aggregate: 图操作,聚合邻居的信息(比如邻居节点的embedding)
Update: NN操作,比如全连接层、MLP,将aggregate得到的结果:乘w、加b(w和b都是可学习的参数)
经过多次Aggregate和Update迭代之后(也就是多个GNN层之后),得到输出embedding,可以用来执行下游任务(比如节点分类、链接预测等)
注意:初始的embedding,可以是从图数据中得到的、也可以是通过embedding生成算法得到的,并不包含在GNN的执行过程中
2.2 Graph Processing Systems
有三点原因,不以传统的图处理系统为基础,拓展GNNAdvisor的工作:
- 图处理系统的图算法优化不适合GNN
- 图处理系统没有考虑GNN的embedding并行(传统的图处理系统一般是节点并行,而GNN的每个节点都有维度很大的embedding,这又是一个并行)
- 图处理系统没有NN操作
2.3 Deep Learning Frameworks
Pytorch、TensorFlow,内置了许多NN operator,针对欧几里得数据做了很多优化,但是对于图这样的非欧几里得数据,面临一些挑战:
- PyG、DGL关注多模型上的编程性、通用性,但是缺乏后端支持来实现高性能。比如:PyG使用CUDA实现的torch-scatter库作为自己的图聚合操作的主要构成部分,但是torch-scatter在处理大规模稀疏图和高维节点embedding时性能不佳,问题在于其kernel采用了高开销的原子操作来执行节点embedding传播,这种方法借鉴了图处理系统的设计原则,但在面临大规模稀疏图与高维节点embedding时性能不佳;DGL采用现成的SPMM(比如cuSparse库的csrmm2)来进行sum-reduced aggregation,同时利用自己的cuda kernel处理带有边属性的聚合。
- PyG、DGL的kernel是硬编码的,无法根据输入图数据的特性、模型的特性、GPU硬件的特性等进行自适应的改变。(用户无法自己改变)
3. Input Analysis of GNN Applications
3.1 GNN Model Information
GNN的update较为固定,但是aggregation变化较多,主流的aggregation方法有两种:
- 只聚合邻居节点的embedding(比如GCN)。实践中,一般先更新降低embedding的维度(embedding矩阵和权重矩阵相乘),然后再聚合,以降低聚合时的数据移动。此时,提升内存局部性很有利(比如将embedding放到快速内存,如GPU的L1 cache)
- 聚合时,涉及到边的特征,需要将边的权重应用到邻居节点上(比如GIN)。此时,不能先执行更新以降维了,因为聚合时需要完整的embedding来计算边的特征。只能先聚合再更新。此时,内存局部性不好利用,因为快速内存可能无法满足完整的embedding的内存需求。但是,可以利用并行计算,比如沿着embedding的维度划分工作负载,利用多个并发线程执行并行计算。
举例来说,输入embedding维度是128,隐藏维度是16。GCN先更新,embedding维度从128降到16,然后以16的embedding维度进行聚合;GIN先以128的embedding维度进行聚合,再更新。因此对于GCN来说,更倾向于内存优化(把embedding放到cache里面);对于GIN来说,更倾向于并行计算上的优化(将较大的embedding维度进行划分)
3.2 Graph Information
Node Degree & Embedding Dimensionality
现实世界的图的节点度数大多遵循幂律分布,这会带来负载不均衡的问题(如果划分节点的话),在GNN上,负载不均衡的问题更严重(相对传统的图处理系统来说,他们的节点带的是标量),因为每个节点都带有一个更高维度的embedding。
节点embedding使得某些传统图处理系统上的cache优化失效,因为embedding维度更高,而cache的内存相对较小,存不下太多embedding。比如,对于节点带有标量属性的传统图处理系统,64KB的L1 cache可以存放 16 × 1 0 3 16\times{10^3} 16×103个node,而对于embedding维度为64的GNN来说,只能存放 256 256 256个node。
根据节点度数和embedding维度,可以估计节点的负载。如果负载取决于节点度数,那么从节点的邻居上并行,同时执行更多的邻居;如果负载取决于embedding维度,那么从embedding的维度上并行。
Graph Community
图社区是现实世界图的一个关键特征,一小小组节点,组内保持强连接(即很多边连接),组间保持弱连接(即较少的边连接)。
图处理系统以节点为中心的聚合方式中,每个节点独立地load自己的邻居节点(每个节点带有标量属性)(如Fig. 3(b)),会重复加载,但是由于是并行load,因此并行带来的优势与重复加载引入的冗余相抵消。但对于GNN来说,每个节点都带有高维的embedding,此时,重复加载带来的额外成本显著提高。若采用图社区的特点,则可减少冗余加载(如Fig. 3©)。

4. 2D Workload Management
GNNAdvisor包含了由输入驱动的带参数的2D Workload Management,包含三种技术:coarse-grained neighbor partitioning, fine-grained dimension partitioning, warp-based thread alignment
4.1 Coarse-grained Neighbor Partitioning
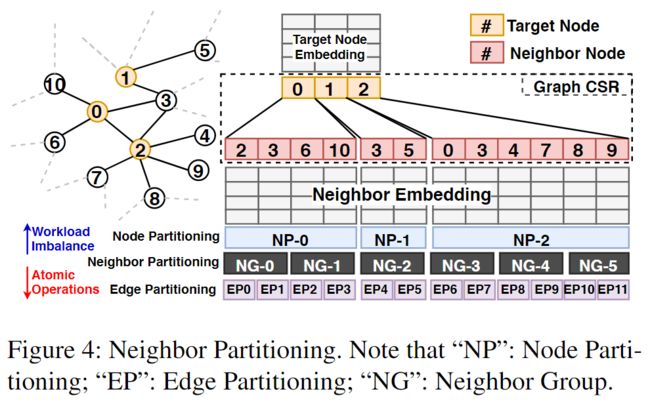
将邻居节点划分为大小相等的neighbor group(NG),并将NG作为调度的基本单元。
如Fig. 4所示,NG的大小取为2(这是一个可调的参数),节点0有四个邻居2 3 6 10,划分到NG-0和NG-1中,注意:一个NG中只放同一节点的邻居(便于调度、同步),当邻居节点的数量不能被NG的大小整除时,会带来不平衡,可以通过改变NG的大小来缓解。
为了支持neighbor group,引入neighbor-partitioning module和neighbor-partitioning graph store,neighbor-partitioning建立在graph loader上,将图上的邻居节点划分为一个个NG;neighbor-partitioning graph store存储关于分组的元信息,包括分组id、源节点、邻居节点的起始位置。
划分邻居进行聚合有三个好处:
- 和粒度更粗的以节点为中心的划分相比,减小了负载不均衡
- 和粒度更细的以边为中心的划分(比如PyG)相比,避免了管理许多小型单元带来的调度、同步开销
- 引入了一个与性能相关的的参数:neighbor-group size(ngs),可以用来设计参数、性能调优
划分邻居,可以缓解低维embedding的负载不均衡问题,对于高维embedding,还需要进一步的操作:Fine-grained Dimension Partitioning
4.2 Fine-grained Dimension Partitioning
沿embedding划分一个NG的负载,如Fig. 5所示,原始的NG的负载被分配给了11个连续的线程,每个线程负责embedding的一个维度的聚合(如果ngs=2,那么一个线程管理两个embedding的一个维度上的聚合),如果维数大于线程数,就迭代。

使用维度划分有两个原因:
- 可以处理更大范围的embedding大小,可以增加线程的数量、或进行多次迭代,来应对维度变化
- 引入了另一个与性能相关的参数:dimension-worker(dw),工作线程的数量,这个值可以帮助平衡线程级并行和每个线程的计算负载
4.3 Warp-based Thread Alignment
4.1、4.2在逻辑上描述了如何平衡负载,但是没有回答如何将负载映射到GPU硬件的层面上。
一种直观的想法是:将连续的线程分配给不同的ng(一个warp对应多个ng),同时处理多个ng(如Fig. 6(a)),但是不同的线程可能具有不同的行为(计算、访存),而warp内部是SIMT,因此,会有部分线程处于等待状态,导致线程发散。(如Fig. 6(a))
因此,让一个warp管理一个ng。可以很好的并行化,减少线程发散。(如Fig. 6(b))

有三个好处:
- 最小化线程间的同步(比如原子操作),减少访存冲突。(**个人理解:**Fig. 6(a)这样的方法,一个warp管理三个ng,三个ng可能包含了相同的节点,因此warp内的不同线程可能会访问同一块内存,此时会导致同步操作或原子操作。而Fig. 6(b)这样的方法,就没有这一问题,因为每个线程都是访问不同的数据,不会冲突)
- 分配的warp数量更多了,可以提高整体并行性、提高SM利用率、隐藏访存延迟。(**个人理解:**每个warp都要访问全局内存,在访存的时候,warp scheduler切换到别的warp执行计算,以隐藏访存延迟,warp数量越多,隐藏延迟的机会越多)
- 合并内存访问。(**个人理解:**现在是连续的线程访问连续的内存空间(同一embedding的不同位置),是合并的。而Fig. 6(a)这种方法,连续的线程,访问来自三个ng的embedding,不是连续的内存空间,因此不是合并的内存访问)
5. Specialized Memory Optimization
为了进一步利用2D负载,引入了针对GNN的内存优化,Community-aware Node Renumbering和Warp-aware Memory Customization
5.1 Community-aware Node Renumbering
为了利用图社区的性质,引入lightweight node renumbering,重排节点id,以提高GNN聚合时的时空局部性。由代码可知:重排是在load之后进行的。
idea:将节点id的邻近性映射到GPU计算单元上。在GNNAdvisor中,2D workload management将节点id连续的节点的邻居分组分配给连续的warp(如果两个节点的id是连续的,那么它们的邻居分组会被分配给连续的warp)。因此,它们更有可能被分配到同一个SM上,来提高加载的共同邻居的数据局部性。
When to apply ? (不是什么时间使用,而是在什么时候,也就是针对什么图使用)
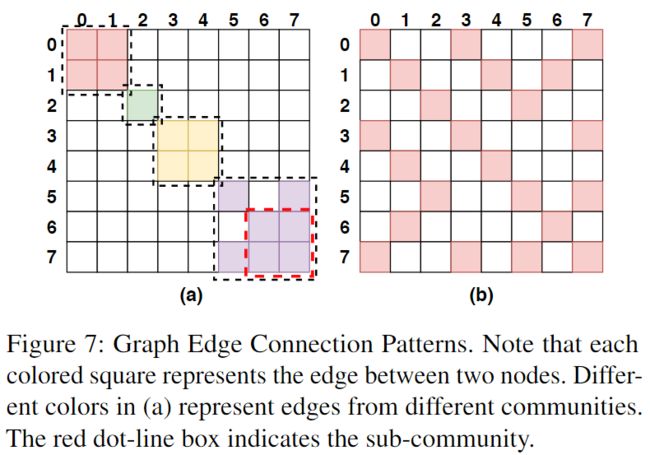
首先要回答一个问题,什么样的图更能从node renumbering中获利,作者的答案是,如Fig. 7(a)这样的、邻接矩阵近似对角模式的图,很难获利,因为这样的图的社区内部的节点id已经是连续的了;而像Fig. 7(b)这样的、形状很不规则的图,更容易从node renumbering中获利。因此提出一个metric—***Averaged Edge Span(AES)***来决定执行重排是否是有利的。

其中,E是图的边集,#E是边数, s r c i d src_{id} srcid和 t r g i d trg_{id} trgid是每条边源节点、目标节点的id。在加载图的时候,计算AES,作者在大型图上的分析表明:当 A E S > ⌊ N 100 ⌋ \sqrt{AES}>\lfloor{\frac{\sqrt{N}}{100}}\rfloor AES>⌊100N⌋时,更有可能提升性能(注意,N前面有个#,typora公式内部不让打#,所以没打上去)
How to apply ?
利用了Rabbit Reordering,这是一种完全并行且成本低廉的图重排序技术。具体而言,它首先通过分层合并边和聚类节点来最大化图的模块化程度。然后通过深度优先搜索(DFS)遍历为每个聚类生成节点顺序。
更重要的是,Rabbit Reordering可以层次化地捕获图社区(即,一组较小的子社区包含在一个更大的社区中,如Fig. 7(a)所示)。不同粒度的这些社区可以很好地匹配GPU缓存层次结构,较小的子社区(占用一个 SM)可以从L1缓存中获得数据局部性的好处,而较大的社区(占用多个 SM)则可以从更大的L2缓存中获得数据局部性。
5.2 Warp-aware Memory Customization
PyG、Gunrock在读写embedding和聚合时,使用了大量的全局内存访问和原子操作,带来了巨大的开销,并未充分利用shared memory。
作者提出了一种以warp为中心的共享内存优化技术。
为每个邻居组(warp)的目标节点保留一个共享内存空间(每个目标节点对应一块空间),这样来自warp的线程可以将规约的中间结果缓存到共享内存中。随后,在线程块内部,我们仅为每个目标节点指定一个warp(称为leader),以将中间结果从共享内存复制到全局内存。具体而言,每个warp(维护在warpPtr中)有三个属性:nodeSharedAddr(邻居分组聚合结果的共享内存地址)、nodeID(目标节点的ID)和leader(一个布尔标志,指示当前warp是否是用于将结果从共享内存更新到全局内存的leader warp)。

6. Design Optimization
GNNAdvisor的Decider中的分析模型和自动参数选择功能。
Analytical Modeling
GNNAdvisor的性能分析模型有两个变量:WPT是workload per thread,SMEM是shared memory usage per block

其中,ngs是一个邻居分组中的节点数量,Dim是embedding的维度,dw是4.2中负责聚合的线程数,tpb是thread per block,tpw是thread per warp,FloatS在GPU上是4字节。tpb是用户自己选择的,tpw在GPU上是32。
Parameter Auto Selection
为了确定ngs和dw的值,作者设计了以下两个步骤:
- 根据tpw和Dim决定dw的值,如果Dim >= tpw,dw = tpw;如果Dim < tpw,dw = tpw / 2。
- 根据dw和用户自己选择的tpb的值,来决定ngs的值。约束条件包括使WPT约等于1024,以及SMEM ≤ SMEMperBlock(现代 GPU 上的 SMEMperBlock 为48KB到96KB)。在不同的 GPU 上,即使CUDA核心数量和全局内存带宽不同,单线程的工作负载容量(由 WPT 衡量)保持相似。tpb通常选择为2的幂,但小于或等于1024。我们基于微基准测试和先前的文献的见解显示,较小的块(1到4个warp,即32 ≤ tpb ≤ 128)可以提高warp调度的灵活性,避免尾部效应,从而提高GPU的占用率和吞吐量。(知道了WPT、Dim、dw,根据上面的公式,可以求出ngs)
7. Evaluation
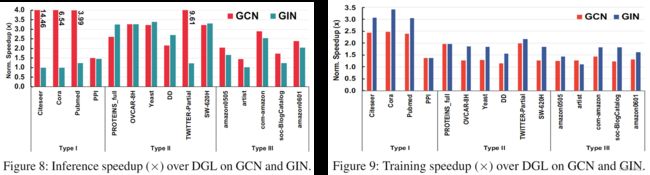
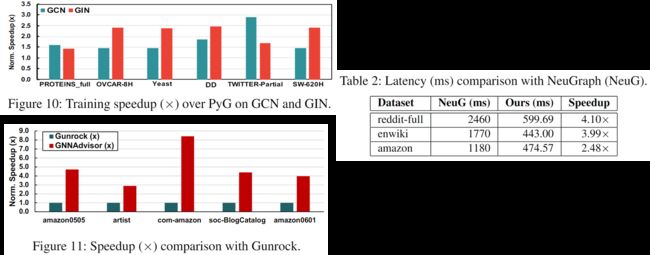
注意:DGL是最优秀的baseline,因此,选择在所有数据集上与DGL相比。而只在PyG、NeuGraph、Gunrock擅长的数据集上对比,其中Gunrock没法做GNN,因此使用SpMM来比较。
我的总结
这篇论文主要关注点在于如何利用model dataset的特点,来针对性地做优化,发挥在给定model dataset上的最大性能。
第三章,讲述了作者设计第四章、第五章优化策略所根据的性质。
第四章,考虑的主要是节点度数和embedding维度,对于节点度数大的而言,节点上的并行(邻居划分 4.1)更有帮助,而对于embedding维度大的而言,embedding上的并行(维度划分 4.2)更有帮助。4.3讲了如何在硬件层面上实现4.1 4.2提到的策略。
第五章,考虑的主要是图社区这一性质,将图数据经过节点重排(5.1)组织成图社区性质较强的形式,可以减少聚合阶段的重复load。5.2设计了一个算法来利用shared memory缓存归约的中间结果。
第六章,是如何自动选择第四章第五章的策略中涉及到的调优参数(ngs dw)。