深度强化学习_AlphaGo 王树森课程笔记
AlphaGo
- 一、 游戏规则
- 二、 设计思路
- 三、 Training
-
- 1. 策略网络
-
- 1.1 State (of AlphaGo Zero)
- 1.2 Policy Network
- 1.3 Behavior Cloning
- 1.4 策略梯度
- 2. 价值网络
-
- 2.1 Policy Value Networks (AlphaGo Zero)
- 2.2 训练价值网络
- 四、 Execution:Monte Carlo Tree Search
-
- 1. 主要思想
- 2. MCTS步骤
-
- 2.1 Step1:Selection
- 2.2 Step2:Expansion
- 2.3 Step3:Evaluation
- 2.4 Step4:Backup
- 3. 决策
深度强化学习实例:围棋游戏
一、 游戏规则
棋盘:19x19
落子点:361个
State:黑白棋子以及空位的排列。
状态 s {\color{green}s} s:可以用由0和1组成的19x19x2的tensor来表示。
- 分别用两个19x19的矩阵来对应黑子和白子,若某位置有黑子(白子),矩阵对应元素为1,否则为0;
- AlphaGo实际使用19x19x48的tensor来记录其他信息。
Action:往棋盘的空白位置上放一个棋子。
- 动作空间 Action space: A ⊂ { 1 , 2 , 3 , … , 361 } \mathcal{A}\subset\{1,2,3,\dots,361\} A⊂{1,2,3,…,361}。
二、 设计思路
Training
- 用behavior cloning来初步学习策略网络(policy network):AlphaGo从16万局人类的游戏记录中学习一个策略网络;
a. behavior cloning:一种监督学习,本质是多分类,不是强化学习。 - 用策略梯度算法训练策略网络:AlphaGo用两个策略网络做自我博弈,拿胜负结果来训练策略网络;
- 用策略网络训练价值网络(value network)。(实质是在做回归)
a. 用的不是actor-critic方法,actor-critic方法要求同时训练策略网络和价值网络,而AlphaGo先训练策略网络后训练价值网络。
Execution
用策略网络和价值网络执行蒙特卡洛树搜索(Monte Carlo Tree Search, MCTS)
三、 Training
1. 策略网络
1.1 State (of AlphaGo Zero)
19x19x17的tensor:
- 19x19:对应黑子(白子),若某位置有黑子(白子),矩阵对应元素为1,否则为0;
- 17:把当前黑子的位置用一个矩阵表示,之前七步黑子的位置用另外七个矩阵表示,为了表示最近八步黑子和白子的位置需要用到8+8=16个矩阵;第17个矩阵:如果当前该下黑子,则为全1矩阵,若该下白子则为全0矩阵。

1.2 Policy Network
Policy Network of AlphaGo
状态:由19x19x48的tensor表示。
策略网络:都是卷积层,没有全连接层。
输出:19x19的矩阵,矩阵每一个元素对应一个放棋子的位置,即输出361个动作的概率。

Policy Network of AlphaGo Zero
状态:由19x19x17的tensor表示,作为输入。
输出:361维的向量,输出层的激活函数是softmax(输出的是概率分布)

1.3 Behavior Cloning
训练第一步:用Behavior Cloning初始化策略网络,从人的经验中学习一个初步的策略网络。
AlphaGo 2016用了Behavior Cloning,AlphaGo Zero没用到。
- 原因:开始时,策略网络的参数由随机初始化得到。(若直接让策略网络自我博弈,它们需要随机摸索很多次才能得出合理的动作,时间消耗太大)
- 训练数据:人类围棋游戏动作序列被记录下来。(KGS有160k局高级玩家游戏记录)
- Behavior Cloning:用监督学习的方法训练策略网络。
- 训练后的策略网络足以打败业余玩家,打不过职业玩家。
Behavior Cloning不是强化学习,而是一种模仿学习(Imitation learning),agent不需要奖励,只需要模仿人的动作就行。是一种多分类回归方法。
强化学习与模仿学习的本质区别:是否有奖励。
用Behavior Cloning训练策略网络
- 每一步观测到一个状态 s t {\color{green} s_t} st(用一个tensor表示棋盘格局),作为策略网络 π \pi π的输入;
- 策略网络给出预测(361维的向量) p t = [ π ( 1 ∣ s t , θ ) , … , π ( 361 ∣ s t , θ ) ] ∈ ( 0 , 1 ) 361 {\color{d44d37}p_t}=[\pi({\color{d44d37}1}|{\color{green}s_t},\bm\theta),\dots,\pi({\color{d44d37}361}|{\color{green}s_t},\bm\theta)]\in(0,1)^{361} pt=[π(1∣st,θ),…,π(361∣st,θ)]∈(0,1)361,表示361个动作的概率;
- 人类玩家真实动作 a t ∗ = 281 {\color{d44d37}a_t^*=281} at∗=281,即把棋子下在第281号位置;
- 将动作 a t ∗ = 281 {\color{d44d37}a_t^*=281} at∗=281做one-hot encode,得到一个361维向量 y t ∈ { 0 , 1 } 361 {\color{d44d37}y_t} \in \{0,1\}^{361} yt∈{0,1}361(第281个元素是1,其余全零);
- Loss=CrossEntropy ( y t , p t ) ({\color{d44d37}y_t,p_t}) (yt,pt),用CrossEntropy作为损失函数,衡量人类玩家的动作 y t {\color{d44d37}y_t} yt与策略网络的预测 p t {\color{d44d37}p_t} pt之间的差异, y t {\color{d44d37}y_t} yt与 p t {\color{d44d37}p_t} pt越接近,CorssEntropy就越小;
- 求损失函数关于神经网络参数 θ \bm\theta θ的梯度,做梯度下降更新 θ \bm\theta θ。
Behavior Cloning本质是多分类
- 棋盘上有361个位置:361个类别;
- 策略网络的输出:每一个类别的概率;
- 人类玩家的动作:361个类别中的一个,看作是ground truth,即真实标签。
缺点
若状态 s t {\color{green} s_t} st没有出现在训练数据中,则策略网络做出的决策 a t {\color{d44d37}a_t} at就不会太好,导致出现下一个训练数据未包含的状态,从而使得策略网络生成更离谱的动作,随着错误累加,状态会越来越奇怪,策略网络做出更糟糕的动作,最后AI失败。
改进
在Behavior Cloning后用强化学习接着训练策略网络,让策略网络变得更强大。
1.4 策略梯度
用策略梯度算法进一步提高策略网络。
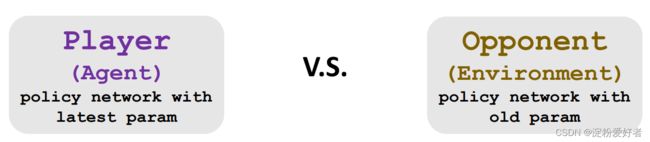
用强化学习训练策略网络——两个策略网络做博弈
- Player:即Agent,由策略网络控制,用的是策略网络最新的模型参数,每下完一局围棋,把胜负作为奖励,靠奖励更新Player参数。
- Opponent:即Environment,每当Player下一个棋子,Opponent也走一步,相当于随机状态转移,用策略网络控制,随机从旧的参数中选一个出来作为Opponent参数。
定义奖励:假设step T T T后一局游戏结束
奖励:
- r 1 = r 2 = ⋯ = r T − 1 = 0 {\color{337ea9}r_1}={\color{337ea9}r_2}=\dots={\color{337ea9}r_{T-1}}={\color{337ea9}0} r1=r2=⋯=rT−1=0(一局游戏没结束时奖励都为0);
- r T = + 1 {\color{337ea9}r_T}={\color{337ea9}+1} rT=+1(winner);
- r T = − 1 {\color{337ea9}r_T}={\color{337ea9}-1} rT=−1(loser)。
回报:
- u t = ∑ i = t T r i u_t=\sum^T_{i=t}{\color{337ea9}r_i} ut=∑i=tTri(不做折扣);
- Winner: u 1 = u 2 = ⋯ = u T = + 1 u_1=u_2=\dots=u_T=+1 u1=u2=⋯=uT=+1;Agent获胜,认为Agent所有动作都是好的;
- Loser: u 1 = u 2 = ⋯ = u T = − 1 u_1=u_2=\dots=u_T=-1 u1=u2=⋯=uT=−1;Agent失败,认为Agent每一步动作都是臭棋。
- 即无法区分具体哪一个动作的好坏,只能把每步都同等对待,用最终结果给所有动作相同的回报。
Policy Gradient
Policy Gradient:状态价值函数 V ( s ; θ ) V(s;\bm\theta) V(s;θ)关于策略网络参数 θ \bm\theta θ的梯度。
- 用策略梯度的无偏估计 ∂ log π ( a t ∣ s t ; θ ) ∂ θ ⋅ Q π ( s t , a t ) \frac{\partial\log\pi({\color{d44c47}{a_t}}|{\color{green}s_t};\bm\theta)}{\partial\bm\theta}\cdot Q_\pi({\color{green}s_t},{\color{d44c47}{a_t}}) ∂θ∂logπ(at∣st;θ)⋅Qπ(st,at)近似策略梯度;
- 动作价值函数定义为随机变量 U t U_t Ut的条件期望: Q π ( s t , a t ) = E [ U t ∣ s t , a t ] Q_\pi({\color{green}s_t},{\color{d44c47}{a_t}})=\Bbb E[U_t|{\color{green}s_t},{\color{d44c47}{a_t}}] Qπ(st,at)=E[Ut∣st,at];
- 可以用 U t U_t Ut的观测值 u t u_t ut来近似 U t U_t Ut的期望,即用 u t u_t ut来近似 Q π ( s t , a t ) Q_\pi(s_t,{\color{d44c47}a_t}) Qπ(st,at);
- 近似策略梯度: ∂ log π ( a t ∣ s t ; θ ) ∂ θ ⋅ u t \frac{\partial\log\pi({\color{d44c47}{a_t}}|{\color{green}s_t};\bm\theta)}{\partial\bm\theta}\cdot u_t ∂θ∂logπ(at∣st;θ)⋅ut。
总体流程
- Player和Opponent博弈,每玩完一局可更新一次模型参数;
- 得到轨迹: s 1 , a 1 , … , s T , a T {\color{green}s_1},{\color{d33d47}a_1},\dots,{\color{green}s_T},{\color{d33d47}a_T} s1,a1,…,sT,aT;
- 得到轨迹和奖励后,更新Player的策略网络:
- Player回报: u 1 = u 2 = ⋯ = u T u_1=u_2=\dots=u_T u1=u2=⋯=uT(均为+1或-1);
- 计算近似策略梯度的累加和: g θ = ∑ t = 1 T ∂ log π ( a t ∣ s t ; θ ) ∂ θ ⋅ u t \textbf{g}_{\theta}=\sum^T_{t=1}\frac{\partial\log\pi({\color{d44c47}{a_t}}|{\color{green}s_t};\bm\theta)}{\partial\bm\theta}\cdot u_t gθ=∑t=1T∂θ∂logπ(at∣st;θ)⋅ut;
- 策略梯度上升,更新策略网络: θ ← θ + β ⋅ g θ \bm\theta\leftarrow\bm\theta+\beta\cdot\textbf{g}_\theta θ←θ+β⋅gθ。
2. 价值网络
此处的价值网络是对状态价值函数 V V V的近似,而不是对 Q ∗ Q^* Q∗的近似。
AlphaGo用价值网络 v ( s , w ) v({\color{green}s},\textbf w) v(s,w)近似价值函数 V π ( s ) V_\pi({\color{green}s}) Vπ(s),用价值网络评价当前状态的好坏。
- 状态价值函数: V π ( s ) = E [ U t ∣ S t = s ] V_\pi({\color{green}s})=\Bbb E[U_t|{\color{green}S_t=s}] Vπ(s)=E[Ut∣St=s],其中 U t U_t Ut为+1或-1。
- 给定策略函数 π \pi π,状态价值函数 V π V_\pi Vπ可以评价当前状态 s {\color{green}s} s的好坏,值越接近1,状态越好越接近胜利;值接近-1则代表快输了。
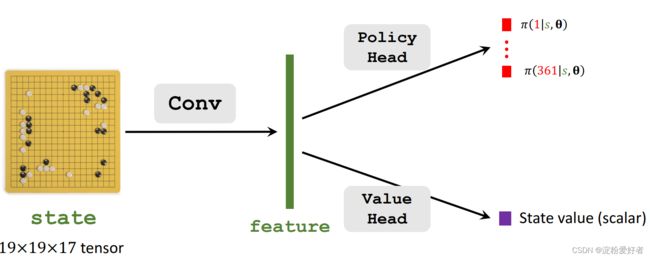
2.1 Policy Value Networks (AlphaGo Zero)
AlphaGo:策略网络和价值网络是分开的两个神经网络;
AlphaGo Zero:策略网络和价值网络共享一些卷积层:
输入:两个网络都需要将19x19x17的状态tensor作为输入;
卷积:底层卷积对输入提取特征,提取到的特征对两个网络都适用。
输出:
- 策略网络:输出361个概率值,每个值对应一个动作(即棋盘上的位置),说明了下一步该怎么走。
- 价值网络:输出一个标量,是对当前状态 s {\color{green}s} s的打分,反映出当前状态下的胜算有多大。
2.2 训练价值网络
AlphaGo先训练策略网络 π \pi π,然后在策略网络的帮助下训练价值网络 v v v。
-
让两个策略网络进行博弈,每下完一局更新一次价值网络,并得到回报 u t u_t ut;(用到策略网络)
Winner: u 1 = u 2 = ⋯ = u T = + 1 u_1=u_2=\dots=u_T=+1 u1=u2=⋯=uT=+1;
Loser: u 1 = u 2 = ⋯ = u T = − 1 u_1=u_2=\dots=u_T=-1 u1=u2=⋯=uT=−1;
-
Loss: L = ∑ t = 1 T 1 2 [ v ( s t , w ) − u t ] 2 L=\sum^T_{t=1}\frac{1}{2}[v({\color{green}s_t},\textbf w)-u_t]^2 L=∑t=1T21[v(st,w)−ut]2; L L L可以反映出价值网络 v v v的预测是否准确,预测越准值越小;
价值网络 v v v的学习可类比于回归问题:将真实观测到的 u t u_t ut作为target,希望价值网络的预测 v ( s t , w ) v({\color{green}s_t},\textbf w) v(st,w)与真实值 u t u_t ut接近。
-
做梯度下降更新模型参数: w ← w − α ⋅ ∂ L ∂ w \textbf w\leftarrow\textbf w-\alpha\cdot\frac{\partial L}{\partial \textbf w} w←w−α⋅∂w∂L。
四、 Execution:Monte Carlo Tree Search
下棋时需要向前看n步,模拟未来情况,从而挑选出当前最优动作,穷举出的情况越多胜算越大。
1. 主要思想
-
随机抽取动作 a {\color{d44d37}a} a:按照动作的好坏程度,以不同的概率选择;排除掉不好的动作,只搜索好的动作;
用策略函数排除掉不好的动作:策略函数可以算出每个动作的概率值,概率值非常低的都是不好的动作,都要排除掉。
-
用策略网络做自我博弈直至游戏结束,看胜负结果,并根据胜负情况和价值函数来给动作 a {\color{d44d37}a} a打分;
-
重复2多次,每个动作都有很多分数,分数反映动作好坏;
-
AlphaGo执行总分最高的动作。
2. MCTS步骤
蒙特卡洛树搜索每轮模拟分四步(AlphaGo每下一步棋子都要把这四步模拟重复多次):
- Selection:按照动作的分数选出一个动作 a {\color{d44d37}a} a(该动作为假象动作,AlphaGo并不真正执行)进行模拟,看看这个动作好不好;
- Expansion:假象对手根据策略网络 π \pi π随机走一步(同样为模拟),并更新状态;
- Evaluation:给本次选出的动作 a {\color{d44d37}a} a打分;价值网络给当前状态打分为 v v v,策略网络做自我博弈直到游戏结束得到奖励 r r r。动作 a {\color{d44d37}a} a的分数为 v + r 2 \frac{v+r}{2} 2v+r;
- Backup:用计算出的数值 v + r 2 \frac{v+r}{2} 2v+r更新动作的分数。
2.1 Step1:Selection
【问题】观测到棋盘状态 s t {\color{green} s_t} st,应该探索哪一个动作?
【策略】应该优先探索好的动作,可以忽略掉不好的动作。
-
首先给所有动作 a {\color{d44d37}a} a打分: score ( a ) = Q ( a ) + η ⋅ π ( a ∣ s t ; θ ) 1 + N ( a ) \text{score}({\color{d44d37}a})=Q({\color{d44d37}a})+\eta\cdot \frac{\pi({\color{d44d37}a}|{\color{green}s_t};\bm\theta)}{1+N({\color{d44d37}a})} score(a)=Q(a)+η⋅1+N(a)π(a∣st;θ);反映动作的好坏程度,好的动作分数高。
初始化时,所有 Q ( a ) Q({\color{d44d37}a}) Q(a)都为0,完全由策略网络 π \pi π决定探索哪个动作;多次搜索后, N ( a ) N({\color{d44d37}a}) N(a)变大,第二项值变小,策略网络变得无关紧要,此时探索哪一个动作几乎完全由 Q ( a ) Q({\color{d44d37}a}) Q(a)来决定。
- Q ( a ) Q({\color{d44d37}a}) Q(a):动作价值(一张表,记录了361个动作的分数),由MCTS计算得到;
- η \eta η:超参数,需手动调整;
- π ( a ∣ s t ; θ ) \pi({\color{d44d37}a}|{\color{green}s_t};\bm\theta) π(a∣st;θ):策略网络;
- N ( a ) N({\color{d44d37}a}) N(a):给定状态 s t {\color{green}s_t} st,动作 a {\color{d44d37}a} a被选中的次数;
- π ( a ∣ s t ; θ ) 1 + N ( a ) \frac{\pi({\color{d44d37}a}|{\color{green}s_t};\bm\theta)}{1+N({\color{d44d37}a})} 1+N(a)π(a∣st;θ):动作越好,策略网络 π \pi π给 a {\color{d44d37}a} a打的分数就会越高,分子 π ( a ∣ s t ; θ ) \pi({\color{d44d37}a}|{\color{green}s_t};\bm\theta) π(a∣st;θ)越大;但若动作 a {\color{d44d37}a} a已经被多次探索,分母中的 N ( a ) N({\color{d44d37}a}) N(a)就会变大,降低动作 a {\color{d44d37}a} a的分数,如此可避免重复探索同一个动作太多次;
-
选择分数最高的动作进行探索,并更新该动作的分数。
2.2 Step2:Expansion
【问题】假如AlphaGo执行上步选中的动作 a t {\color{d44d37}a_t} at后,对手会做什么动作?
-
假设AlphaGo执行选定动作 a t {\color{d44d37}a_t} at,用策略网络模拟对手:根据策略网络随机抽样一个动作 a t ′ ∼ π ( ⋅ ∣ s t ′ ; θ ) {\color{d44d37}a_t'}\sim\pi({\color{d44d37}\cdot}|{\color{green}s_t'};\bm\theta) at′∼π(⋅∣st′;θ),并假设对手执行该动作;
s t ′ {\color{green}s_t'} st′:站在对手角度观测到的棋盘状态;
-
对手执行动作 a t ′ {\color{d44d37}a_t'} at′后,产生新的状态 s t + 1 {\color{green}s_{t+1}} st+1。
- 对手相当于环境,对手的策略相当于状态转移函数 p ( s t + 1 ∣ s t , a t ) p({\color{green}s_{t+1}}|{\color{green}s_t},{\color{d44d37}a_t}) p(st+1∣st,at),即对手的动作会产生新的状态 s t + 1 {\color{green}s_{t+1}} st+1;
- 状态转移函数未知,可以拿策略函数 π \pi π代替。
2.3 Step3:Evaluation
- Fast Rollout:从状态 s t + 1 {\color{green}s_{t+1}} st+1开始,让策略网络做自我博弈,直到分出胜负为止;
- 一局结束后得到奖励 r T {\color{337ea9}r_T} rT,用来评价状态 s t + 1 {\color{green}s_{t+1}} st+1的好坏,赢了便增加 s t + 1 {\color{green}s_{t+1}} st+1的评分,若输了便减少 s t + 1 {\color{green}s_{t+1}} st+1的评分;
- 用价值网络 v v v评价 s t + 1 {\color{green}s_{t+1}} st+1:直接把 s t + 1 {\color{green}s_{t+1}} st+1输入价值网络得到分数 v ( s t + 1 ; w ) v({\color{green}s_{t+1}};\textbf w) v(st+1;w);
- 计算出状态 s t + 1 {\color{green}s_{t+1}} st+1的分数: V ( s t + 1 ) = 1 2 v ( s t + 1 ; w ) + 1 2 r T V({\color{green}s_{t+1}})=\frac{1}{2}v({\color{green}s_{t+1}};\textbf w)+\frac{1}{2}{\color{337ea9}r_T} V(st+1)=21v(st+1;w)+21rT,反映出状态 s t + 1 {\color{green}s_{t+1}} st+1的好坏。
2.4 Step4:Backup
- MCTS会重复很多次,每个状态下都会有多条记录,每个动作 a t {\color{d44d37}a_t} at都有很多个子节点 V ( s t + 1 ) V({\color{green}s_{t+1}}) V(st+1);
- 将 a t {\color{d44d37}a_t} at下的所有记录做平均作为 a t {\color{d44d37}a_t} at新的价值 Q ( a t ) Q({\color{d44d37}a_t}) Q(at),是对动作 a t {\color{d44d37}a_t} at好坏的评价;
- Q Q Q在第一步Selection被用到:初始化时所有 Q Q Q都为0,每当一个动作被搜索一次就会留下一条记录, Q Q Q值是所有记录 V V V值的平均。
3. 决策
- N ( a ) N({\color{d44d37}a}) N(a)可以反映出动作的好坏:一个动作越好,被选中的次数就越多,即一个动作 a {\color{d44d37}a} a的 Q Q Q值和 π \pi π值越大, N ( a ) N({\color{d44d37}a}) N(a)就越大。
- MCTS后做出决策:选中 N N N值最大的动作并执行,即 a t = argmax a N ( a ) {\color{d44d37}a_t}=\mathop\text {argmax}\limits_{{\color{d44d37}a}}N({\color{d44d37}a}) at=aargmaxN(a)。