自动驾驶的未来:BEV与Occupancy网络全景解析与实战揭秘!
自动驾驶领域中,什么是BEV?什么是Occupancy?
作者:小柠檬 | 来源:公众号「3DCV」
BEV是Bird’s Eye View 的缩写,意为鸟瞰视图。在自动驾驶领域,BEV 是指从车辆上方俯瞰的场景视图。BEV 图像可以提供车辆周围环境的完整视图,包括车辆前方、后方、两侧和顶部。
BEV 图像可以通过多种方式生成,包括:
使用激光雷达:激光雷达可以直接测量物体在三维空间中的位置,然后将这些数据转换为 BEV 图像。
使用摄像头:摄像头可以通过计算图像的透视投影来生成 BEV 图像。
使用混合传感器:可以使用激光雷达和摄像头的组合来生成 BEV 图像,以获得更精确和完整的视图。

Occupancy Network 是特斯拉在自动驾驶中使用的一种深度学习方法。它是一种3D语义占用感知方法,可以从多视图图像中生成车辆周围环境的三维占用网格。
Occupancy Network 的工作原理如下:
首先,Occupancy Network 将来自多视图图像的输入数据转换为一个三维特征空间。
然后,Occupancy Network 使用深度神经网络来学习这个特征空间中的占用概率。
最后,Occupancy Network 将占用概率转换为一个三维占用网格。

具体来说,Occupancy Network在自动驾驶系统中主要用于以下任务:
障碍物检测:Occupancy Network 可以用于检测车辆周围的障碍物,例如其他车辆、行人、骑自行车者等。
路径规划:Occupancy Network 可以用于生成车辆的路径,并避免障碍物。
车辆控制:Occupancy Network 可以用于控制车辆的速度和方向,以确保安全行驶。
在未来,随着自动驾驶技术的不断发展,Occupancy Network 将在自动驾驶系统中发挥更加重要的作用。
如何学习BEV和Occupancy工程?
第一是扎实的基础知识
学习 BEV 和 OCC 需要扎实的知识基础,包括:线性代数,微积分,概率论,深度学习,计算机视觉,ubuntu操作系统,C++,python,pytorch,矩阵论,阅读论文和博客得习惯。
第二是数据采集和处理能力
BEV和OCC需要大量的数据来训练和验证算法,因此数据采集和处理能力是必不可少的。数据采集可以通过激光雷达、摄像头、毫米波雷达等传感器来完成,数据处理需要对数据进行清洗、标注和增强等操作,以确保数据的质量和可用性。
在数据采集和处理方面,需要掌握以下技能:传感器原理,数据采集工作,数据集框架制定,数据增强等,开源数据集的通用性和适用性往往有限,因此我们需要根据自身工程需求进行定制化开发。
第三是算法开发能力
BEV和OCC的算法需要能够从数据中提取有效特征2D和3D特征,解耦特征头,多种数据的特征的融合,时序信息的处理,并进行有效的建模和推理。算法开发需要扎实的数学、统计和机器学习基础,以及一定的编程能力。
第四是模型扩展能力
这其实是最重要的一点,举一反三,结合现有的资料,参考前沿的方向,提出对自己具有挑战性的话题,结合车道线,时序信息,三维重建,slam定位等技术提升自己模型的性能。
以上如何同时学习呢?
3D视觉工坊联合自动驾驶资深专家推出的《BEV与Occupancy网络的全景解析与实战》线上课程。课程内容涉及到BEV(鸟瞰图)和Occupancy网络模型的训练与生成,旨在培养学员能够在现实环境中不仅仅是应用占据网络技术,还包括了解NeRF在Occupancy中的应用,车道线的应用,世界模型的应用等,以及数据的起源、融合、生成、标定和模型的优化。
课程的核心目标在于助力学员快速掌握Occupancy技术,从而能够更早地独立研究相关论文,并找到适合自己的项目实践路径。这不仅能显著提升个人的竞争力,还能深入理解哪些算法最适合实际应用——因为我们相信,只有能够真正落地的算法,才是优秀的算法。
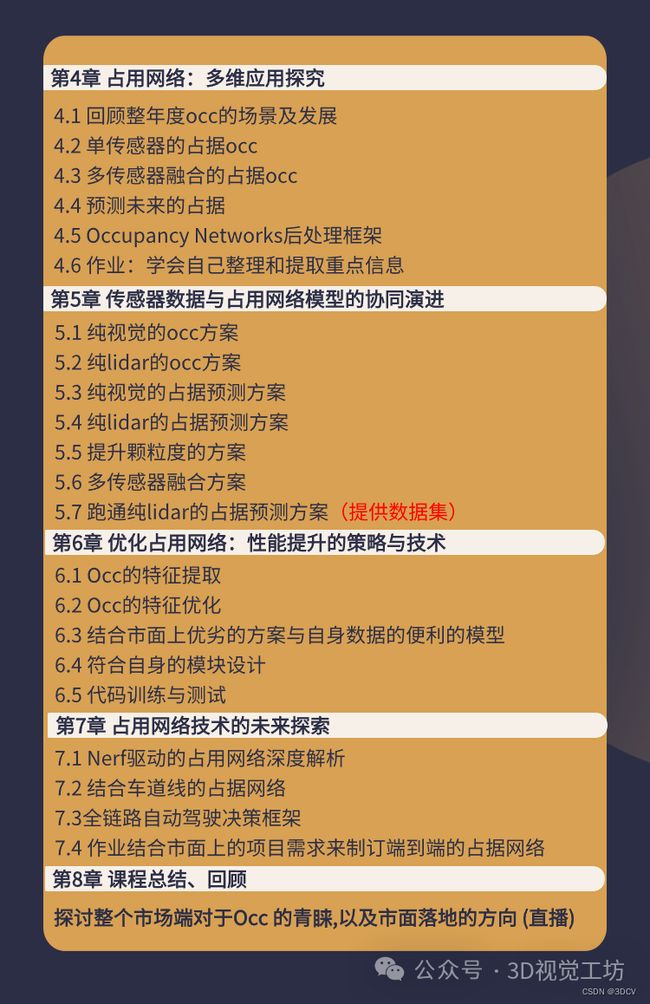
为了实现这一目标,我们精心设计了课程大纲,涵盖了占据网络技术的各个关键领域和最新进展,确保学员能够全面、深入地了解和掌握这一前沿技术。课程大纲如下:

需要什么配置?
硬件配置要求:为了顺利进行本课程的学习和实践,建议配备多显卡的计算系统,以应对复杂的数据处理和模型训练需求。
对于暂时无法准备此类设备的学员,我们建议租用云端服务器,以获得必要的计算资源。本课程还建议使用基于Ubuntu操作系统的环境,以确保软件兼容性和高效的工作流程。
此外,实际的数据采集设备,如相机和激光雷达(Lidar),将大幅增强实践体验,让你更深入地理解数据采集和处理的过程。
如果你无法获取这些设备,不必担心——我们将提供必要的数据集,确保所有学员都能充分参与课程的实践环节,无论你的硬件条件如何。
课程特色
实战导向:本课程专注于实践操作,引导你从数据采集阶段起步,深入探索BEV和Occupancy的实际应用。
全面的学习材料:每个章节都配备了详细的讲义和代码实例,确保你能够全面理解BEV和Occupancy的核心概念和应用技巧。
深度递进式课程框架:本课程采用创新的深度递进教学法,它类似于构建一个“知识金字塔”。起初,我们将重点放在数据的收集和解析上,确保学生掌握坚实的基础。
随后,我们将深入探讨BEV和Occupancy的高级技术和调整策略,确保学生不仅理解理论,还能灵活应用。
最后,课程将引导学生将视野拓展至宏观层面,运用所学知识在自动驾驶及其他创新领域进行独立思考和应用,实现从基础到高级,再到创新应用的完整知识结构搭建。一起探索BEV和Occupancy的世界,不仅学习理论,更获得实战经验,拓宽你在自动驾驶及其他领域的应用视野。
适合谁听
学术探索者:无论你是致力于计算机视觉和自动驾驶感知领域的本科生、硕士生还是博士生,这门课程将为你的研究提供深刻见解和实用技能。
行业专业人士:如果你是从事计算机视觉与自动驾驶2D/3D感知领域的算法工程师,这门课程将帮助你深化专业技能,掌握行业最前沿的技术。
前瞻性实践者:对于那些在量产和预研领域工作,寻求应用于L2至L4级自动驾驶技术的同学们,本课程将是你理想的技术提升平台。
热情初学者:即使你只是对计算机视觉有一定了解,但对自动驾驶行业的最新算法抱有极大热情,这里也有你的一席之地,一起探索和成长。
不论你的专业背景或经验水平,一同探索自动驾驶的奇妙世界,深入学习行业前沿技术,共同迈向未来技术的潮流前端。
学后收获
占用网络的深度掌握:通过本课程,你将对占用网络有一个全面的理解,从理论基础到编程实践,深入了解这个领域的发展历程、应用场景、优化策略,以及未来的发展趋势。
实践与应用的高效转化:课程内容旨在帮助你快速将所学知识应用于科研和实际的量产项目中,大幅节省时间成本,加速从理论到实践的转换过程。
行业竞争力的显著提升:完成本课程后,你将在自动驾驶领域拥有明显的竞争优势。同时,课程也为你提供了与众多行业专业人士和学习伙伴建立联系和合作的机会。
快速达到专业水平:经过系统学习,你将在短时间内达到相当于2年经验的感知算法工程师水平,成为在占用网络领域的早期研究者和工程师。
不仅提升你的专业技能,还将为你在自动驾驶领域的职业生涯打下坚实的基础,助你成为行业内的佼佼者。
开课时间
2024年1月20日晚上8点(周六),每周更新一章节。
课程答疑
本课程答疑主要在本课程对应的鹅圈子中答疑,学员学习过程中,有任何问题,可以随时在鹅圈子中提问。
作者:小柠檬 | 来源:公众号「3DCV」