论文阅读<Contrastive Learning-based Robust Object Detection under Smoky Conditions>
论文链接:https://openaccess.thecvf.com/content/CVPR2022W/UG2/papers/Wu_Contrastive_Learning-Based_Robust_Object_Detection_Under_Smoky_Conditions_CVPRW_2022_paper.pdf
Abstract
目标检测是指有效地找出图像中感兴趣的目标,然后准确地确定它们的类别和位置。近年来,许多优秀的方法被开发出来,以提供强大的检测能力。然而,在恶劣天气如烟熏条件下,它们的性能可能会显著降低。在这篇论文基于对比下学习提出了一个鲁棒的烟雾图像目标检测算法。提出的算法由两个模块组成,对比学习模块(Contrast learning module)和目标的预测框(object bounding box prediction module)。第一个模块通过最大化同一烟雾图像的不同增强视图之间的一致性来学习表示向量,然后把这些特征送入第二个模块以生成bounding box。此外还提出了一个新颖的仿射数据增强方法。在A2I2 - Haze数据集上进行了大量的的实验,该数据集是第一个与航空和地面图像对齐的实时烟雾测量的真实雾霾数据集。该数据集也是CVPR 2022第5届UG2 +挑战赛中唯一用于训练和测试的数据集。与最先进的方法相比,评估结果表明了我们提出的目标检测器的优越性。
Intruduction
对比学习属于辨别性特征表示的范畴(discriminative representation learning),通过不同样本之间的比较学习来学习一种表示,这种对比通过在相似的图像对和不相似的图像对中实现。通过对它们的比较,可以有效地实现"相似"样本的表示在嵌入空间中被紧密地映射在一起,而"不相似"样本的表示在嵌入空间中被远离的对比学习目标。对比学习有一个明显的优势,它可以忽略输入的表面现象,同时能够学习和提取它们的内部一致性。
Method
提出的算法流程如下图所示,主要包括量模块,第一个是Constrast learning module,致力于捕获每个相同烟雾图像的不同增强版本之间的内在一致特征,从而能够学习到它们的一致表示。第二个模块是Object bounding box prediction module,把学习到的表示向量和原来的图像一起作为输入来预测每个目标的bounding box。
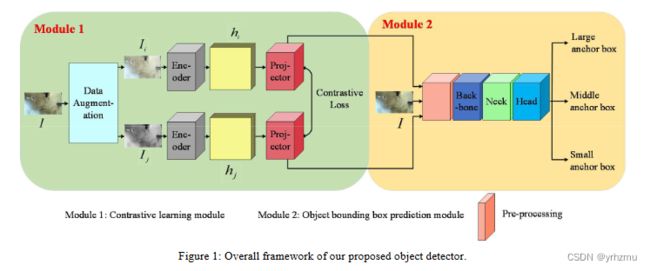
3.1 Constrast learning module
图2是对比学习模块的结构,该模块包含三个部分:Data Augmentation、Encoder Network、Projection Head(和SimCLR类似)。
在Data Augmentation中,对给定的烟雾图像,采用两种图像增强方法,分别是图像灰度化和随机亮度增强来生成其相关的增强视图,记为 和
和![]() ,记为一对正样本。在Encoder Network中,使用ResNet50提取特征获得
,记为一对正样本。在Encoder Network中,使用ResNet50提取特征获得 和
和 。 在Projection Head中,使用两个简单的MLP把和映射到更抽象的特征。
。 在Projection Head中,使用两个简单的MLP把和映射到更抽象的特征。
使用以下损失函数优化对比学习,其中一批 N 个示例被随机采样以构建 2N 个增强图像。 和
和 是增强后的图像,
是增强后的图像,![]() 表示L2归一化后的y和v的点乘,
表示L2归一化后的y和v的点乘, 表示一个温度参数。
表示一个温度参数。
![]()
![]()
3.2 Object boudning box prediction module
这个模块包括四个部分:pre-processing,backbone,neck和head。在pre-processing部分,使用Transposed convolution改变输入特征和为 和
和 ,然后和输入图像I一起输入到YOLOV5s
,然后和输入图像I一起输入到YOLOV5s

3.3 Data Augmentation
在本文中,考虑到拍摄图像中存在无人机视角变化,我们还提出了一种新颖的仿射数据增强方法。首先,我们拍摄一些内容相似但拍摄角度不同、拍摄距离不同的照片。然后,利用透视变换计算每对相似图像之间的单应矩阵。之后,我们对测试数据集的每个图像执行这些单应矩阵,创建新的转换图像。最后,这些变换后的图像与原始训练数据一起用于网络的训练。
Experiments
4.1 Baselines
对CenterNet、YOLOv5和参与CVPR2022挑战的12种优秀方法进行对比。用于训练和测试的数据集是 A2I2-Haze [32],它是 CVPR 2022 第五届 UG2+ 挑战赛 Haze 中目标检测赛道中采用的唯一数据集。A2I2Haze 是第一个具有原位烟雾测量的真实雾霾数据集与空中和地面图像对齐。该数据集不仅包含从 12 个视频剪辑而来的总共 177 个配对的模糊/干净帧图像,还包含从相同来源收集的用于训练的 240 个带注释的干净图像,以及用于测试的 60 个其他烟雾图像。此外,我们还采用了所提出的数据增强方法。对这些测试图像进行仿射变换,产生384张不同角度、不同距离的变换图像,作为训练数据的补充
4.2 Implementation details
我们首先使用训练数据单独更新对比学习模块的权重。完成此训练过程后,构建的表示向量与原始图像一起用作对象边界框预测模块的输入来训练其网络。完成所有这些任务后,我们提出的目标检测器的训练就真正完成了。
所提出的目标检测器在 NVIDIA GeForce RTX3080 GPU 上进行训练和测试。在对比学习模块的训练过程中,batch size和patch size分别设置为8和512×512,采用随机梯度下降(SGD)优化器,学习率初始化为0.05并降低90总共 300 个 epoch 中的 150、200 和 250 个 epoch 的百分比。此外,为了训练对象边界框预测模块,我们将批量大小和补丁大小分别设置为32和512×512。热身是在训练前进行的。学习率初始化为0.01,然后在总共500个epoch的训练中采用Cosine学习率下降策略。
4.3 Quantitative evaluation
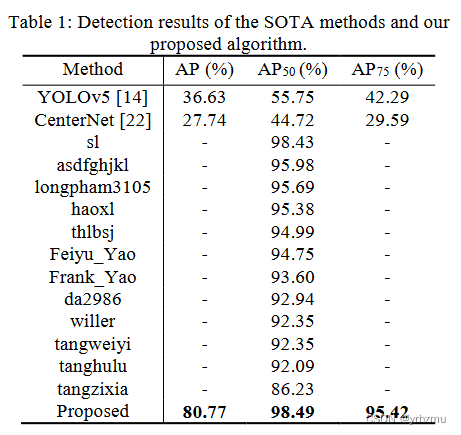
表 1 给出了 SOTA 方法和我们提出的检测器产生的物体检测的数值结果。对于那些挑战者,CVPR 2022只公布了他们的AP50结果,如表1所示。从表中的结果可以看出,由于YOLOv5和CenterNet都没有采取适应烟雾条件的措施,所以它们的性能都较差。尽管 12 名挑战参与者中的每一位都在 AP50 中获得了高分,但我们提出的算法仍然在所有评估方法中获得了针对目标检测的最佳平均预测结果。
4.4 Quanlitative evaluation
图4是定性分析的结果,提出的方法是最接近于Ground Truth的。
 4.5 Ablation Study
4.5 Ablation Study
通过直接从图 1 的框架中删除模块 1,在目标检测中使用对比学习机制。此外,还通过避免在训练中使用那些转换后的数据来评估所提出的数据增强的有效性。为了阐明它们的效果,我们将我们提出的方法与以下两个基线进行比较:1)基线1:我们仅使用增强训练数据训练模块2。 2)基线2:我们仅使用原始训练数据来训练我们提出的方法。表 2 比较了他们在消融研究中的物体检测结果。从表2的结果可以看出,对比学习可以学习物体的内部一致性,从而进一步准确地确定目标位置。此外,我们提出的数据增强方法很大程度上改善了目标检测的 AP 结果。