视觉SLAM十四讲-高翔 第4讲 李群和李代数
李群和李代数
- 1. 李群李代数基础
-
- 1.1 群
- 1.2 李代数的定义
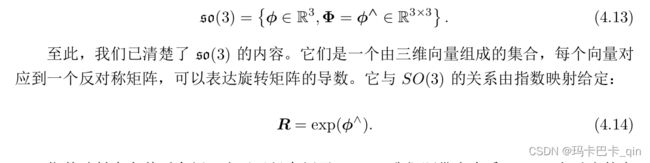
- 1.3 李代数 s o ( 3 ) \mathfrak{so}(3) so(3)
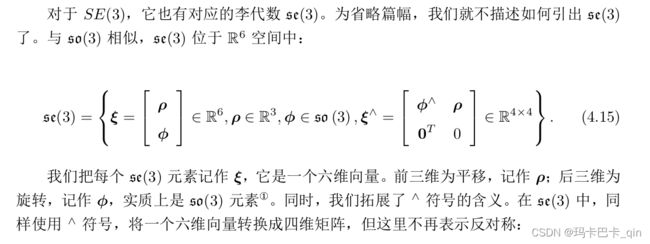
- 1.4 李代数 s e ( 3 ) \mathfrak{se}(3) se(3)
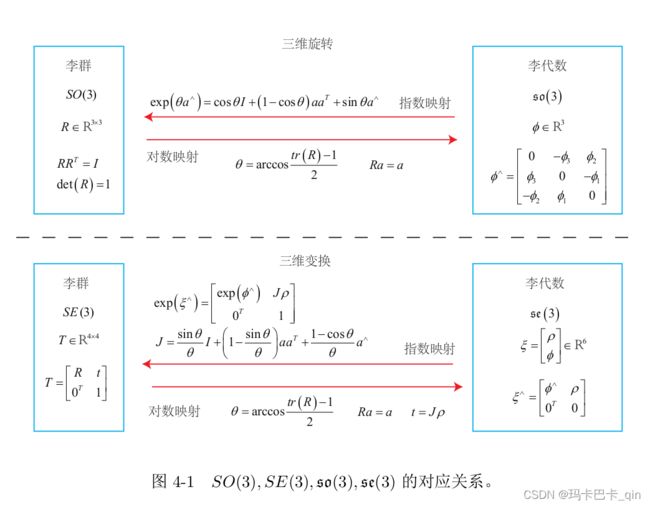
- 2. 指数和对数映射
-
- 2.1 S O ( 3 ) SO(3) SO(3)上的指数映射
- 2.2 S E ( 3 ) SE(3) SE(3)上的指数映射
- 3. 李代数求导与扰动模型
-
- 3.1 BCH 公式与近似形式
- 3.2 李代数求导
- 4. SOPHUS库的使用
-
- 4.1 SOPHUS库的安装
- 4.2 SOPHUS库的使用
1. 李群李代数基础
因为在 SLAM 中位姿是未知的,而我们需要解决什么样的相机位姿最符合当前观测数据这样的问题。一种典型的方式是把它构建成一个优化问题,求解最优的 R, t,使得误差最小化。
S O ( 3 ) SO(3) SO(3)和 S E ( 3 ) SE(3) SE(3)对加法不封闭,关于乘法封闭。我们知道乘法对应着旋转或变换的复合——两个旋转矩阵相乘表示做了两次旋转。对于这种只有一个运算的集合,我们把它叫做群。
1.1 群
群(Group)是一种集合加上一种运算的代数结构。我们把集合记作 A A A,运算记作 ⋅ \cdot ⋅,那么群可以记作 G = ( A , ⋅ ) G = (A, ·) G=(A,⋅)。群要求这个运算满足以下几个条件:
 矩阵中常见的群:
矩阵中常见的群:
 李群是指具有连续(光滑)性质的群。像整数群 Z 那样离散的群没有连续性质,所以不是李群。而 SO(n) 和 SE(n),它们在实数空间上是连续的。我们能够直观地想象一个刚体能够连续地在空间中运动,所以它们都是李群。
李群是指具有连续(光滑)性质的群。像整数群 Z 那样离散的群没有连续性质,所以不是李群。而 SO(n) 和 SE(n),它们在实数空间上是连续的。我们能够直观地想象一个刚体能够连续地在空间中运动,所以它们都是李群。
1.2 李代数的定义
每个李群都有与之对应的李代数。李代数描述了李群的局部性质。

其中二元运算被称为李括号,三维向量 R 3 \mathbb{R}^3 R3上定义的叉积 × × × 是一种李括号,因此 g = ( R 3 , R , × ) \bm{\mathfrak{g}} = (\mathbb{R}^3 , \mathbb{R}, ×) g=(R3,R,×) 构成了一个李代数。
1.3 李代数 s o ( 3 ) \mathfrak{so}(3) so(3)
1.4 李代数 s e ( 3 ) \mathfrak{se}(3) se(3)

2. 指数和对数映射
2.1 S O ( 3 ) SO(3) SO(3)上的指数映射


2.2 S E ( 3 ) SE(3) SE(3)上的指数映射

3. 李代数求导与扰动模型
3.1 BCH 公式与近似形式

3.2 李代数求导
使用李代数解决求导问题的思路分为两种:
- 用李代数表示姿态,然后对根据李代数加法来对李代数求导。
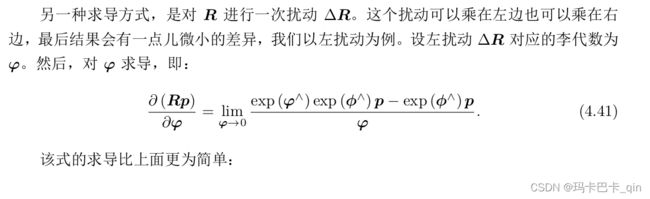
- 对李群左乘或右乘微小扰动,然后对该扰动求导,称为左扰动和右扰动模型。
第一种方式对应到李代数的求导模型,而第二种则对应到扰动模型。下面我们来讨论这两种思路的异同。



4. SOPHUS库的使用
4.1 SOPHUS库的安装
参考链接:
Ubuntu20安装Sophus库
4.2 SOPHUS库的使用
创建 useSophus.cpp
#include 对应的CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(useSophus)
# 为使用 sophus ,需要使用 find_package 命令找到它
find_package( Sophus REQUIRED )
include_directories( ${Sophus_INCLUDE_DIRS} )
add_executable( useSophus useSophus.cpp )
target_link_libraries( useSophus ${Sophus_LIBRARIES} )