【雕爷学编程】MicroPython手册之 ESP32-C3 通用控制 machine

MicroPython是为了在嵌入式系统中运行Python 3编程语言而设计的轻量级版本解释器。与常规Python相比,MicroPython解释器体积小(仅100KB左右),通过编译成二进制Executable文件运行,执行效率较高。它使用了轻量级的垃圾回收机制并移除了大部分Python标准库,以适应资源限制的微控制器。
MicroPython主要特点包括:
1、语法和功能与标准Python兼容,易学易用。支持Python大多数核心语法。
2、对硬件直接访问和控制,像Arduino一样控制GPIO、I2C、SPI等。
3、强大的模块系统,提供文件系统、网络、图形界面等功能。
4、支持交叉编译生成高效的原生代码,速度比解释器快10-100倍。
5、代码量少,内存占用小,适合运行在MCU和内存小的开发板上。
6、开源许可,免费使用。Shell交互环境为开发测试提供便利。
7、内置I/O驱动支持大量微控制器平台,如ESP8266、ESP32、STM32、micro:bit、掌控板和PyBoard等。有活跃的社区。
MicroPython的应用场景包括:
1、为嵌入式产品快速构建原型和用户交互。
2、制作一些小型的可 programmable 硬件项目。
3、作为教育工具,帮助初学者学习Python和物联网编程。
4、构建智能设备固件,实现高级控制和云连接。
5、各种微控制器应用如物联网、嵌入式智能、机器人等。
使用MicroPython需要注意:
1、内存和Flash空间有限。
2、解释执行效率不如C语言。
3、部分库函数与标准版有差异。
4、针对平台优化语法,订正与标准Python的差异。
5、合理使用内存资源,避免频繁分配大内存块。
6、利用原生代码提升速度关键部位的性能。
7、适当使用抽象来封装底层硬件操作。
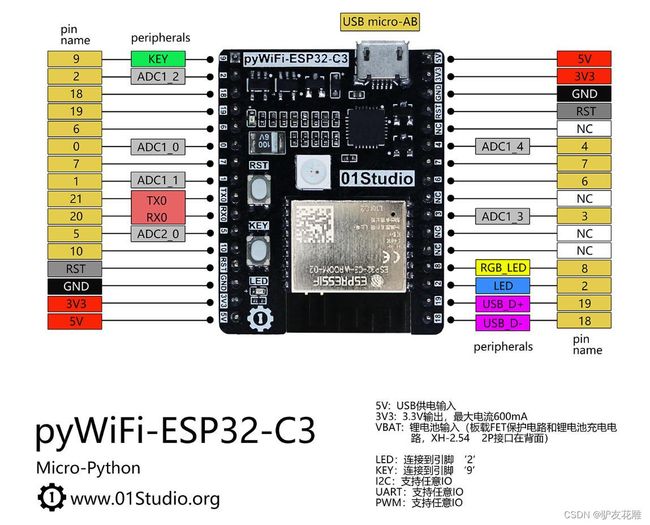
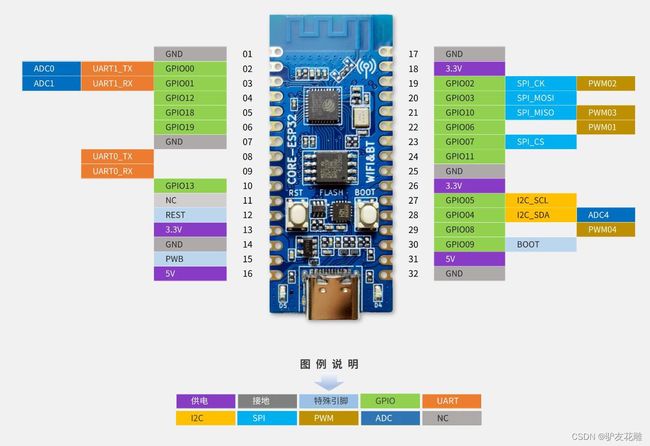
ESP32-C3是一款由乐鑫科技开发的物联网芯片,它具有以下主要特性:
搭载 RISC-V 32 位单核处理器,时钟频率高达 160 MHz,支持 2.4 GHz Wi-Fi 和 Bluetooth 5 (LE)。
内置 400 KB SRAM,384 KB ROM,支持最大 16 MB 的外置 Flash。
集成了天线开关、射频巴伦、功率放大器、接收低噪声放大器、滤波器、电源管理模块等功能,仅需要 20 余个外围元件。
具有 22 个可编程 GPIO 管脚,支持 ADC、SPI、UART、I2C、I2S、RMT、TWAI 和 PWM。
具有完善的安全机制,包括安全启动、Flash 加密、数字签名和 HMAC 外设、世界控制器模块等。
沿用乐鑫成熟的物联网开发框架 ESP-IDF,支持 Arduino 和 MicroPython 等开源平台。
MicroPython的ESP32-C3通用控制模块machine是MicroPython中的一个重要模块,提供了对ESP32-C3硬件的底层控制和访问接口。以下是对其主要特点、应用场景和需要注意的事项的详细解释。
主要特点:
硬件控制:machine模块提供了对ESP32-C3芯片上各种硬件资源的控制接口,包括GPIO引脚、ADC/DAC模块、定时器、PWM输出、SPI和I2C总线等。通过这些接口,开发人员可以直接控制和访问硬件资源。
低级别访问:machine模块提供了对底层硬件的低级别访问接口,使得开发人员可以更加精细地控制硬件操作和配置。例如,可以设置GPIO引脚的工作模式、读取模拟输入、配置定时器的时钟和触发方式等。
节能模式:ESP32-C3芯片具有低功耗特性,在使用machine模块时,可以利用其提供的接口进入节能模式,从而降低功耗并延长电池寿命。例如,可以配置GPIO引脚的睡眠模式、控制定时器的唤醒和休眠等。
应用场景:
嵌入式系统开发:machine模块为嵌入式系统开发提供了底层硬件控制的能力。开发人员可以利用这些接口实现各种功能,如传感器数据采集、外设控制和通信模块驱动等。
物联网(IoT)应用:ESP32-C3作为一款Wi-Fi和蓝牙支持的芯片,结合machine模块,可以用于物联网应用的开发。开发人员可以通过控制GPIO引脚、访问传感器数据等实现智能设备的控制和数据采集。
自动化控制系统:machine模块的底层硬件控制能力使其非常适合用于自动化控制系统的开发。例如,可以利用GPIO控制继电器、使用定时器实现定时任务、通过SPI或I2C总线与外部设备通信等。
需要注意的事项:
硬件资源冲突:在使用machine模块控制硬件资源时,需要注意资源冲突的问题。例如,同时使用相同的GPIO引脚作为输入和输出,可能会导致意外的结果或损坏硬件。
电源管理:在开发应用时,需要合理管理电源以确保稳定和高效的运行。特别是在使用节能模式时,需要注意正确配置唤醒源和休眠条件,以避免意外唤醒或电源消耗过高的情况。
硬件兼容性:ESP32-C3支持的硬件功能可能会因具体的硬件版本而有所不同。在使用machine模块的功能时,需要确保其与芯片的硬件版本兼容,并查阅相关文档和资料以了解具体的功能和限制。
综上所述,MicroPython的ESP32-C3通用控制模块machine提供了对ESP32-C3芯片底层硬件的控制和访问接口。其主要特点包括硬件控制、低级别访问和节能模式。它适用于嵌入式系统开发、物联网应用和自动化控制系统。在使用时,需要注意硬件资源冲突、电源管理和硬件兼容性等方面的事项。
案例一:使用MicroPython的GPIO模块控制LED灯闪烁
from machine import Pin
import time
# 初始化LED引脚为输出模式
led_pin = Pin(2, Pin.OUT)
while True:
# 点亮LED灯
led_pin.on()
time.sleep(1)
# 熄灭LED灯
led_pin.off()
time.sleep(1)
要点解读:
导入machine模块中的Pin类。
初始化LED引脚为输出模式。
使用一个无限循环,每次循环中先点亮LED灯,等待1秒后熄灭LED灯,再等待1秒。
案例二:使用MicroPython的ADC模块读取模拟电压值
from machine import ADC, Pin
# 初始化ADC模块和模拟输入引脚
adc = ADC(Pin(34))
while True:
# 读取模拟电压值
voltage = adc.read() / 4096 * 3.3
print('模拟电压值:', voltage)
time.sleep(1)
要点解读:
导入machine模块中的ADC和Pin类。
初始化ADC模块和模拟输入引脚。
使用一个无限循环,每次循环中读取模拟电压值,并将其转换为实际电压值(单位:V),然后打印出来。
案例三:使用MicroPython的I2C模块与传感器通信
from machine import I2C, Pin
import dht11
# 初始化I2C接口和DHT11传感器引脚
i2c = I2C(scl=Pin(5), sda=Pin(4))
dht = dht11.DHT11(Pin(17))
while True:
# 读取温度和湿度值
temperature, humidity = dht.read()
print('温度:', temperature, '℃')
print('湿度:', humidity, '%')
time.sleep(1)
要点解读:
导入machine模块中的I2C和Pin类,以及dht11模块。
初始化I2C接口和DHT11传感器引脚。
使用一个无限循环,每次循环中读取温度和湿度值,并打印出来。
案例四:使用machine模块控制GPIO引脚
from machine import Pin
import utime
# 设置GPIO16为输出模式
led = Pin(16, Pin.OUT)
# 循环5次,每次间隔1秒,将LED灯打开和关闭
for i in range(5):
led.value(1) # 打开LED灯
utime.sleep(1) # 等待1秒
led.value(0) # 关闭LED灯
utime.sleep(1) # 等待1秒
要点解读:
从machine模块中导入Pin类。
使用Pin类创建一个GPIO对象,将GPIO16设置为输出模式,并将其赋值给led变量。
在一个for循环中,通过led.value()函数控制LED灯的打开和关闭状态,并使用utime.sleep()函数等待指定的时间。
案例五:使用machine模块控制PWM输出
from machine import PWM, Pin
import utime
# 设置GPIO17为PWM输出模式,频率为1KHz,占空比为50%
pwm = PWM(Pin(17), freq=1000, duty=500)
# 等待2秒
utime.sleep(2)
# 关闭PWM输出
pwm.deinit()
要点解读:
从machine模块中导入PWM类和Pin类。
使用PWM类创建一个PWM对象,将GPIO17设置为PWM输出模式,设置频率为1KHz,占空比为50%,并将其赋值给pwm变量。
使用utime.sleep()函数等待2秒钟,使PWM信号稳定输出。
使用pwm.deinit()函数关闭PWM输出。
案例六:使用machine模块读取传感器数据
from machine import Pin
import utime
# 设置传感器接口为输入模式
sensor = Pin(2, Pin.IN)
# 循环读取传感器数据,并打印到串口输出
while True:
data = sensor.value() # 读取传感器数据
print("Sensor value: %d" % data) # 打印传感器数据到串口输出
utime.sleep(0.1) # 等待0.1秒,降低读取频率,避免频繁读取导致CPU负载过高
要点解读:
从machine模块中导入Pin类。
将传感器接口设置为输入模式,并将其赋值给sensor变量。这里假设传感器连接到GPIO2引脚。
进入一个无限循环,不断读取传感器数据,并通过串口输出打印出来。
使用utime.sleep()函数等待0.1秒钟,降低读取频率,避免频繁读取导致CPU负载过高。
案例七:控制蜂鸣器
import machine
import time
# 初始化蜂鸣器引脚
buzzer = machine.Pin(2, machine.Pin.OUT)
# 控制蜂鸣器发声
buzzer.on()
time.sleep(1)
buzzer.off()
要点解读:
导入machine模块和time模块。
使用machine.Pin()函数初始化一个引脚对象,用于连接蜂鸣器。
将引脚对象设置为输出模式,通过Pin.OUT参数。
使用on()方法使蜂鸣器发声。
使用off()方法停止蜂鸣器发声。
案例八:控制舵机
import machine
import time
# 初始化舵机引脚
servo = machine.Pin(2, machine.Pin.OUT)
pwm = machine.PWM(servo)
# 控制舵机转动到指定角度
pwm.freq(50)
pwm.duty(40)
time.sleep(2)
pwm.duty(115)
time.sleep(2)
pwm.duty(75)
time.sleep(2)
pwm.deinit()
要点解读:
导入machine模块和time模块。
使用machine.Pin()函数初始化一个引脚对象,用于连接舵机。
将引脚对象设置为输出模式,通过Pin.OUT参数。
使用machine.PWM()函数创建一个PWM对象,传入舵机引脚对象。
使用freq()方法设置PWM信号的频率,单位为赫兹。
使用duty()方法设置PWM信号的占空比,范围为0-1023,对应舵机的角度范围。
通过设置不同的占空比,控制舵机转动到指定角度。
使用time.sleep()函数控制舵机在不同角度停留的时间。
使用deinit()方法释放PWM资源。
案例九:控制步进电机
import machine
import time
# 初始化步进电机引脚
step_pin = machine.Pin(2, machine.Pin.OUT)
dir_pin = machine.Pin(3, machine.Pin.OUT)
# 控制步进电机转动
dir_pin.on()
for _ in range(200):
step_pin.on()
time.sleep_us(500)
step_pin.off()
time.sleep_us(500)
要点解读:
导入machine模块和time模块。
使用machine.Pin()函数初始化引脚对象,其中step_pin用于控制步进电机的脉冲信号,dir_pin用于控制步进电机的转向信号。
将引脚对象设置为输出模式,通过Pin.OUT参数。
使用on()方法使引脚输出高电平,控制步进电机转动。
使用off()方法使引脚输出低电平,控制步进电机停止转动。
使用time.sleep_us()函数控制脉冲信号的持续时间和间隔时间。
以上是几个在ESP32-C3上使用MicroPython的通用控制machine模块的实际应用程序参考代码案例。这些案例涵盖了控制蜂鸣器、控制舵机和控制步进电机等常见应用场景。你可以根据这些案例代码,结合具体的硬件和需求进行修改和扩展,实现更多功能和应用。
请注意,以上案例只是为了拓展思路,可能存在错误或不适用的情况。不同的硬件平台、使用场景和MicroPython版本可能会导致不同的使用方法。在实际编程中,您需要根据您的硬件配置和具体需求进行调整,并进行多次实际测试。需要正确连接硬件并了解所使用的传感器和设备的规范和特性非常重要。对于涉及到硬件操作的代码,请确保在使用之前充分了解和确认所使用的引脚和电平等参数的正确性和安全性。