- 生活中的鸡毛蒜皮-----心情琐碎记录
安家妈妈
陪孩子打预防针回来时的小发现今天天气特别的好,阳光灿烂,太阳晒得人暖融融的。可惜这么好的天气就不去郊游,而是去打预防针疫苗。孩子已经六岁了,这是最后的一次接种疫苗打针。昨天晚上接到电话,还有一点担心孩子会害怕,会不会紧张,来医院会不会怕到不敢进去。试想哪一个孩子听到打针会不紧张呢?结果过程居然顺利的不可思议,没有紧张也没有害怕,也没有反复的问。来到社区医院的大楼,还觉得非常有趣好玩的样子。为了让她
- 【嵌入式模块】步进电机使用总结
记录无知岁月
#嵌入式设备嵌入式硬件步进电机
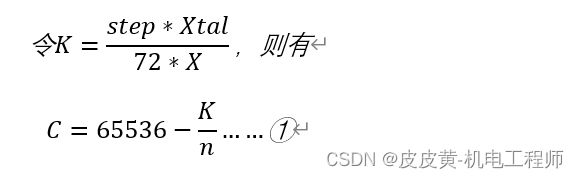
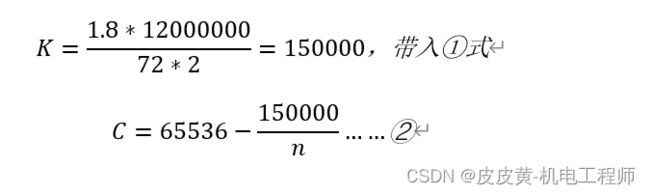
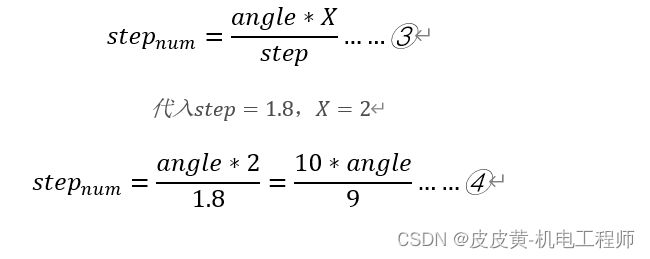
关于本博客 此前上了一门课《自动控制元件》,但是由于学时有限,讲到步进电机就不讲了,留下了一个小遗憾,导致需要使用步进电机时就有点懵,于是找了一篇博客,链接在这里,推荐具有电机知识(如直流电机,异步电机等)的朋友看,如果完全不懂,建议先啃书。
- 即使没有月亮,心中也是一片皎洁
沉酣一梦
【书摘】01.即使没有月亮,心中也是一片皎洁。——路遥《平凡的世界》02.其实我们每个人的生活都是一个世界,即使最平凡的人也要为他生活的那个世界而奋斗。——路遥《平凡的世界》03.人们宁愿去关心一个蹩脚电影演员的吃喝拉撒和鸡毛蒜皮,而不愿了解一个普通人波涛汹涌的内心世界……——路遥《平凡的世界》04.当然,普通并不等于庸俗。他也许一辈子就是一个普通人,但他要做一个不平庸的人。在许许多多平平常常的事
- 公谦学堂,之学堂生活(2)
殷琴
图片发自App这是我们学堂的定海神针,在皮的熊孩子,到了我们张老师这里,都变得乖乖的!哈哈哈!感恩我们的张老师每天辛苦的照料着我们的青青草原,这样我们的老师和孩子才能够吃得上一家院子结的蔬菜!图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App另外,我们的张老师,还有一个张妈妈的称呼。为啥。因为她像一个妈妈一样,照顾着我们每个孩子的生活!
- 2019-11-17 返乡
行动是第一生产力
今天是2019年11月17日,星期日,我在老家黑山开往沈阳的绿皮火车上,-3到8度,外面下着初冬的雨,每一滴都有家乡特有的凉意。老妈刚刚大病初愈,精神倒是还在,讲起话来依旧滔滔不绝,偶尔会有一些疲倦,话语间缺少底气。好在老爸身体健康,吃饭、睡觉、家务活样样操持着,这么多年,无论风雨,老爸一直支撑着这个家的根基。回到家吃的依旧是羊肉饺子,每次爸妈都要买最贵的肉,给我包他们自己不舍得吃的饺子,临走也一
- 五千下车
Alice书吧
“给五千就下车”,太原长春街头,一女子赖在出租车上7小时,任由出租司机苦求半天不理会,还直接在车上解决3次小解。司机和女子从开始的平静沟通到后来互不理睬,再到两人的激烈争吵,从早上拉剧战到傍晚,围观者也越来越多,后来出租车司机求助媒体记者帮忙协助解决。司机对记者说主要责任在于自己,当时他拉乘客来到此处斑马线附近,乘客下车的时候没注意后方行人,车门把女子碰了,正骑着电动车的女子倒在地上,腿表面破了皮
- 亲身经历告诉我,真的不能喝这个东西!!
喵喵酱吖
我最近打算要减肥了,在朋友的建议下买了这个东西,经过几天的使用,让我内心复杂。。。。图片发自App这个就是我最近入手的大白饮,据说它有20多种功效,我上网查了一下,瘦身的主要成分是蔬果酵素和白藜芦醇。蔬果酵素能分解我们摄入的多余糖分,解决便秘和肠道问题,达到排除身体毒素并瘦身的目的。白藜芦醇能够抑制脂肪的形成,帮助咱们。快速减肥无副作用。并且有超强的美白功效。大白饮还含有鳕鱼胶原蛋白肽,能够恢复皮
- 小家伙身上的火气真大
宸铭说
最近孩子脸上,脚上都长了包,出脓水的那种。奶粉本就上火,断奶期间,慢慢的,喝奶粉的量也上来了。这是一个原因。再有就是小家伙对大人的吃食越来越感兴趣。那边,四婶给他吃了橙子,将皮剥掉,吃了些果肉,他对此很感兴趣。再后来,隔壁三奶奶又经常给他吃橘子。然后本就不是天天拉大便的他,更加不会主动拉了要么吃生菜或豌豆等蔬菜,要不就是香蕉等水果,吃了才拉便便。这不,今天的大便特别硬。脸上长的那个包包可吓人了,都
- 名声越来越臭的“京八件”
瓷然
武汉有热干面、长沙有臭豆腐、新疆有大盘鸡、河南有胡辣汤、陕西有肉夹馍、内蒙古有手把肉,而北京除了烤鸭、炸酱面外,就属“京八件”有代表性了。“京八件”又叫“大八件”,即是八种形状、口味不同的京味糕点。为明清宫廷糕点,后流传至民间,以枣泥、青梅、葡萄干、玫瑰、豆沙、白糖、香蕉、椒盐等八种原料为馅,用猪油、水和面做皮,以皮包馅,烘烤而成。随着“京八件”传统点心礼盒逐渐走红,五花八门的“京八件”层出不穷,
- 一家人国庆节想去北京玩5天旅游景点人多吗?
旅游博主嘉尔
家人同游,国庆约——北京,热情之城秋风乍起,金色的阳光洒在大地上,我满怀期待地望着日历上的日期,心中燃起对旅游的热爱与向往。去年国庆假期,我的旅游目的地是充满历史底蕴和现代魅力的北京。娜娜:17680692154(长按复制、添加导游薇信、免费咨询)吃来到北京,怎能错过那些传统美食呢?首当其冲,我们品尝了烤鸭,那香嫩的鸭肉搭配薄脆的鸭皮,一口咬下去,满口的鲜香令人回味无穷。除了烤鸭,还有京酱肉丝、老
- 今日共勉
Onethree丶馒头
一个人能不能成就大事,就看他是否具备一种长久的积极的气场,是否愿意接受现实,并积极地寻求解决之道。——皮克·菲尔《气场》
- 未雨绸缪~母鸟筑巢喻周公
王娟儿童心理成长中心18004
本则成语源于《诗经,幽风》中一首《鸱(chi)鹗(xiao)》的诗(鸱鹗即猫头鹰,在民间传统观念中它是一种恶鸟)。诗中作者借一只母鸟失去小鸟后却仍努力筑巢,为了延续后代在悲痛中撑持着的哀怨情愫,描写自己的勤苦劳瘁。诗中有一段写着:“迨天之未阴雨,彻彼桑土,绸缪牖户。今女下民,或敢侮予!”意思是说:趁着老天还没有下雨,赶快用桑杜的皮,把巢室的空隙紧紧地缠缚着,只要巢室坚固了,还有谁敢来把我欺侮?根据
- 《模范出租车》告诉你:爽剧的正确打开方式
不加钙
这才是爽剧正确的打开方式太爽了吧窥探费脑怪物费手指文森佐费打火机模范出租车费好车李帝勋的脸很有辨识度别再说像潘玮柏了是有那么一丢丢像仔细看差别很大的身材管理的很好各有特点看到第三集两个地方炸出我的泪点女检察官看张代表过往视频和男学生网络搜索不痛苦死法配着bgm太好哭了想起世间种种不公人们的痛苦不尽相同都活着何其艰难大概心里有苦楚的才会共情希望后面每一集都保持高水准大发皮埃斯希望活着的人拥有生活的美
- 学员分享~
醉爱你的笑脸
北大博雅家师学习99群的朋友们,早上好![太阳]我是您的朋友黄朝华,也是第49期参加北大博雅卢老师家师课程的学员,大多朋友未曾谋面,今先闻声,缘份缘份[爱心],感恩[玫瑰][玫瑰],期待彼此相见。我拥有俩青春期活宝,与我家姐姐似知心朋友,也总会灰谐地让我叫她“爸爸”,我如是叫她“爸爸”,顺便示个弱,让她扛点儿事[偷笑];弟弟则是活泼型皮娃,无法静处,三天不抽皮痒,在我和先生的混合双打中成长[呲牙]
- 11-17
yummy0632
什么事没发生,我一个人夜里四点睡着的。早饭:一杯旺仔牛奶,一个枣夹核,俩豆沙粽子。粽子真甜嘤~午饭:葡萄。晚饭:一盒饼干,一个包子皮,两根香蕉,一盒纯牛奶,一块草莓糖,一碗9块钱麻辣烫。麻辣烫第二次吃到九块钱的,开心啊,要的少啊,吃的满足,不撑不饿。
- 天亮了,该睡了
樂岩
天还暗着所以不用睡默默的低头想着脚上还有被小白抓伤的痕迹哦小白是只猫不是很乖比橘子皮还皮的那种她怎么还没回我信息虽然是夏天但是我还是会冷穿了件黑色衬衣牛仔裤空调开到最低却还是冷对手脚冰凉的凉我喜欢她对只是单纯的喜欢第一次见到她是在我复读那年选择考美术生是我自己的意愿一个复读的理科生到一个全是一帮幼稚小屁孩的画室里是不会去搭理她们的至少当时我是这么想的齐耳短发圆圆的脸又很啰嗦画室老师随手一指她是我师
- 皮洛士的胜利——经济学典故
慧子的书屋
皮洛士是古希腊小国伊庇鲁斯的王子。他企图在地中海地区建立一个大国。图片发自App公元前281年,皮洛士率军攻打罗马。在阿普里亚境内的奥斯库伦城附近展开激战。皮洛士赢得了胜利,但损失极其惨重。战斗结束后,大家向他表示祝贺,而皮洛士叹息说:要是再来一次这样的胜利,我也就彻底垮了。图片发自网络这就是著名的“皮洛士的胜利”的典故。在经济学上可以引申为成本太高而收益过少。
- 《带娃逃荒,特种娇娘不好惹》关岚秦荆(独家小说)精彩阅读
海边书楼
《带娃逃荒,特种娇娘不好惹》关岚秦荆(独家小说)精彩阅读主角:关岚秦荆简介:特种兵关岚一朝穿越,居然成了一个新丧夫的寡妇和两个孩子的继母!关岚有点方。生逢乱世要逃荒、儿女双全喜当娘,好在关岚还有一个坑爹空间,和一帮心怀叵测的亲戚们。反派极品手牵手,草根树皮向前走,别问逃荒路上苦不苦?能活着就不错了,要啥自行车!至于千顷良田和那貌美如花的郎君,别急,都会有的!秦大糙汉荆:什么?貌美?还如花?关岚:你
- 2019-04-18【世界没那么大,只有眼前的一片】
Arthur亚瑟
法国圣母堂烧了,台湾圣母显灵了,今天下午出了大地震!让我想起电影「男儿当自强」片头小女孩一手提着灯笼,一面慢步一面唱着:「天上换玉皇,地下换阎王,心中有白莲,还我好家园!」接着在一片「白莲下凡、万民翻身」的吶喊声中,电影开始。。。可,那是戏!在一个「鬼附与精神病」的座谈中,主讲人开始先问了大家一个问题:「假如说我在要来讲"鬼附与精神病"的会场时,果在上楼的楼梯间,踩到了莫明出现的香蕉皮而滑倒,请问
- 空气炸锅自制蛋挞,金黄酥脆
陈大仙儿
自己在家用空气炸锅做的蛋挞,制作简单,做出来的蛋挞金黄酥脆。食材表:鸡蛋1个、白糖15g、纯牛奶80g制作方法:1、碗中磕入一个鸡蛋,加入白糖、纯牛奶,搅拌均匀2、用滤网把蛋液过筛入杯中,这样口感吃起来更加细腻3、从冰箱取出蛋挞皮,不需要解冻,将蛋液倒入蛋挞皮中,倒8分满就可以了4、空气炸锅180度提前预热,然后将蛋挞放入空气炸锅中,180度烤十分钟就可以了
- 爱心账户之存钱日记9.7
静_d595
还没下班小妞就给我发信息说今天想吃凉皮。一般小妞要吃的,我都是毫不犹豫的答应。于是我让她在我下班的时候下楼和我一起去地铁口那家店去。等到下班又有点犹豫,今天要写公众号文章,娃娃这个点又吃了晚饭,不如在美团外卖看看。同事推荐一家不错的凉皮店,一般情况就直接下单,在同事们的领导下知道先去领券再下单。领了一张满20减4的券,虽然不多,但也把它存下来,4元存进爱心账户!
- 吃西瓜
栀子花开1234
今天中午妈妈给我买了我最喜欢的西瓜。西瓜又大又红。妈妈用刀一碰它的皮叉叉他就开了。妈妈把一半西瓜给我们切成块那一半儿西瓜给我们榨了果汁。吃起来好甜呀。这是我吃过世界上最甜的西瓜。
- 意外之伤
一道光0828
打破一只碗,碎碗片割破大挴指,血流如注.....整个过程三十秒完成,似乎不象真实的发生。叫了一声“我手割破了”用左手拼命压住伤口,尽量止住鲜红的血。娃在客厅,跑过来,帮我找止血的云南白药和消毒水,拿棉签帮我擦了一下伤口,根本止不住,然后倒出半瓶云南白药给我整半个指头,然后我继续压着。“小,你别管了,去睡吧。”小小说:“妈,我小时候,腿伤了,你给我涂的什么可以马上止血的。我再找一找”“你那时一点点皮
- 贾富贵和杰福瑞最终还是去做生意了,官宣开店简直“黑”死人
贵圈儿探姐
如果有这样一群小哥哥,和你年龄相仿、颜值爆表。和你一起在黄金海岸开一家餐厅,完成一场未知之旅↓在研究新型美食时,有心机的喂你“试毒”↓也不忘苦中作乐,在后厨忙着刷盘子也要来一段freestyle,分分钟把厨房当迪厅↓虽然他们有时候很皮,但是会把厨艺安排的妥妥当当(冰箱里的食材瑟瑟发抖ing…)↓好了,不用问我想不想体验我只想说——这么帅的的小哥哥不用一打,给我一个就好,我愿意用十顿饭来换!!!“用
- 老皮:失散的风声
老皮大叔
图片发自App老皮诗集:守望一片海(149)·失散的风声穿过我想念的一场雨夜鸟在暗处咳嗽过去和未来的事物总是低于风暴来临之前的寂静黎明终究守不住故乡那片铁青的天空已被一把红尘掩埋在租来的梦里来来往往的,总是淡淡的空我却目睹着自己把前世的债,背负到现在当失散的风声再度纠结必定大于孤独本身人间的喧嚣,以及我的颓废也将被另一种空阔覆盖——————————作者简介:老皮:福建漳州人,1964年出生。福建省
- 为什么优秀的人,都把闹钟定在早晨5:57 ?
拒绝贩卖焦虑
1提前上班让我发现一个秘密话说多年前,我在某知名的纸媒上夜班,每天下午3点上班,晚上11-12点下班。工作很嗨皮,同事很奈斯,就是太辛苦,每到晚上10点,别人准备睡觉,却刚好是我们这些夜班狗最紧张的时刻,办公室里东奔西跑,电脑敲得劈啪作响。子夜时分,别人已进入梦乡,我们却带着满脸油和大把脱落的头发刚刚到家。那时我常在深夜的出租车里暗自垂叹:这种日子何时是个头啊。直到有一天,发生了意外。那是个周末,
- 2023-08-22
默默无闻的小小
只有对任何人不抱希望才能不失望结婚怀孕后,我的心态早就变了,从前的我乐观积极又向上,现在的我斤斤计较,满腹怨气!是从什么时候开始改变?好像是从怀孕开始,又或者是那些没人帮村的无数个夜晚开始,这么多的原因不如说是从“他”开始吧,婚姻里全是鸡毛蒜皮话越来越少同样的问题沟通多次可没有一次改善彼此都觉得没意思弄得别人不开心也显得自己不大度。认识5年结婚,说有感情吧,感觉好笑,说没感情吧,又结婚怀孕了,说他
- 吴彦祖、史派西主演,这部中国版《搏击俱乐部》你看懂了吗?
杰森娱乐
一部电影,一个平行世界的故事来自:石墨社(smshe189)1999年上映过两部电影,后来都成了经典。一部是爱德华·诺顿和布拉德·皮特主演的《搏击俱乐部》,豆瓣评分9.0。还有一部是凯文·史派西主演的《美国丽人》,豆瓣评分8.5。这两部作品没有什么必然联系,前者讲的是一个精神病患者的奇遇,用幻想中的自己,无意间造就了一个影响全国的组织。而后者,更多的是用一种文艺唯美的手法,对一个中年男人的内心世界
- 论语2022-09-14
重启出发
今日内容:0028.《八佾篇》每事问:不懂就问,这是礼貌0029.《八佾篇》射不主皮:靠蛮力竞争的时代,已经过去了今日朗读语句:3.13:王孙贾问曰:“与其媚于奥,宁媚于灶,何谓也?”子曰:“不然。获罪于天,无所祷也。”3.14:子曰:“周监(jian四声)于二代,郁郁乎文哉!吾从周。”3.15:子入大(tai四声)庙,每事问。或曰:“孰谓郰(zou一声)人之子知礼乎?入大庙,每事问。”子闻之,曰
- 水果沙拉
胡沫
今天吃完了面条,妈妈就开始给我做起来水果沙拉。先拿一个火龙果和两根香蕉。走到厨房里,剥开他们的皮,一块儿一块儿切的放进网里我吃的是火龙果,妈妈吃的是香蕉。猜猜这两种水果上面倒入酸奶,这样就美味极了。妈妈叫我去冰箱里来瓶酸奶,我以为只要拿一瓶,所以拆开盒子,只拿了一瓶地给妈妈,妈妈便说:“一瓶不够再拿一瓶!”“哦,好的。”我回应妈妈。我便又去边冰箱那里拿了一瓶酸奶递给妈妈。妈妈递过酸奶。打开包装袋,
- Spring4.1新特性——Spring MVC增强
jinnianshilongnian
spring 4.1
目录
Spring4.1新特性——综述
Spring4.1新特性——Spring核心部分及其他
Spring4.1新特性——Spring缓存框架增强
Spring4.1新特性——异步调用和事件机制的异常处理
Spring4.1新特性——数据库集成测试脚本初始化
Spring4.1新特性——Spring MVC增强
Spring4.1新特性——页面自动化测试框架Spring MVC T
- mysql 性能查询优化
annan211
javasql优化mysql应用服务器
1 时间到底花在哪了?
mysql在执行查询的时候需要执行一系列的子任务,这些子任务包含了整个查询周期最重要的阶段,这其中包含了大量为了
检索数据列到存储引擎的调用以及调用后的数据处理,包括排序、分组等。在完成这些任务的时候,查询需要在不同的地方
花费时间,包括网络、cpu计算、生成统计信息和执行计划、锁等待等。尤其是向底层存储引擎检索数据的调用操作。这些调用需要在内存操
- windows系统配置
cherishLC
windows
删除Hiberfil.sys :使用命令powercfg -h off 关闭休眠功能即可:
http://jingyan.baidu.com/article/f3ad7d0fc0992e09c2345b51.html
类似的还有pagefile.sys
msconfig 配置启动项
shutdown 定时关机
ipconfig 查看网络配置
ipconfig /flushdns
- 人体的排毒时间
Array_06
工作
========================
|| 人体的排毒时间是什么时候?||
========================
转载于:
http://zhidao.baidu.com/link?url=ibaGlicVslAQhVdWWVevU4TMjhiKaNBWCpZ1NS6igCQ78EkNJZFsEjCjl3T5EdXU9SaPg04bh8MbY1bR
- ZooKeeper
cugfy
zookeeper
Zookeeper是一个高性能,分布式的,开源分布式应用协调服务。它提供了简单原始的功能,分布式应用可以基于它实现更高级的服务,比如同步, 配置管理,集群管理,名空间。它被设计为易于编程,使用文件系统目录树作为数据模型。服务端跑在java上,提供java和C的客户端API。 Zookeeper是Google的Chubby一个开源的实现,是高有效和可靠的协同工作系统,Zookeeper能够用来lea
- 网络爬虫的乱码处理
随意而生
爬虫网络
下边简单总结下关于网络爬虫的乱码处理。注意,这里不仅是中文乱码,还包括一些如日文、韩文 、俄文、藏文之类的乱码处理,因为他们的解决方式 是一致的,故在此统一说明。 网络爬虫,有两种选择,一是选择nutch、hetriex,二是自写爬虫,两者在处理乱码时,原理是一致的,但前者处理乱码时,要看懂源码后进行修改才可以,所以要废劲一些;而后者更自由方便,可以在编码处理
- Xcode常用快捷键
张亚雄
xcode
一、总结的常用命令:
隐藏xcode command+h
退出xcode command+q
关闭窗口 command+w
关闭所有窗口 command+option+w
关闭当前
- mongoDB索引操作
adminjun
mongodb索引
一、索引基础: MongoDB的索引几乎与传统的关系型数据库一模一样,这其中也包括一些基本的优化技巧。下面是创建索引的命令: > db.test.ensureIndex({"username":1}) 可以通过下面的名称查看索引是否已经成功建立: &nbs
- 成都软件园实习那些话
aijuans
成都 软件园 实习
无聊之中,翻了一下日志,发现上一篇经历是很久以前的事了,悔过~~
断断续续离开了学校快一年了,习惯了那里一天天的幼稚、成长的环境,到这里有点与世隔绝的感觉。不过还好,那是刚到这里时的想法,现在感觉在这挺好,不管怎么样,最要感谢的还是老师能给这么好的一次催化成长的机会,在这里确实看到了好多好多能想到或想不到的东西。
都说在外面和学校相比最明显的差距就是与人相处比较困难,因为在外面每个人都
- Linux下FTP服务器安装及配置
ayaoxinchao
linuxFTP服务器vsftp
检测是否安装了FTP
[root@localhost ~]# rpm -q vsftpd
如果未安装:package vsftpd is not installed 安装了则显示:vsftpd-2.0.5-28.el5累死的版本信息
安装FTP
运行yum install vsftpd命令,如[root@localhost ~]# yum install vsf
- 使用mongo-java-driver获取文档id和查找文档
BigBird2012
driver
注:本文所有代码都使用的mongo-java-driver实现。
在MongoDB中,一个集合(collection)在概念上就类似我们SQL数据库中的表(Table),这个集合包含了一系列文档(document)。一个DBObject对象表示我们想添加到集合(collection)中的一个文档(document),MongoDB会自动为我们创建的每个文档添加一个id,这个id在
- JSONObject以及json串
bijian1013
jsonJSONObject
一.JAR包简介
要使程序可以运行必须引入JSON-lib包,JSON-lib包同时依赖于以下的JAR包:
1.commons-lang-2.0.jar
2.commons-beanutils-1.7.0.jar
3.commons-collections-3.1.jar
&n
- [Zookeeper学习笔记之三]Zookeeper实例创建和会话建立的异步特性
bit1129
zookeeper
为了说明问题,看个简单的代码,
import org.apache.zookeeper.*;
import java.io.IOException;
import java.util.concurrent.CountDownLatch;
import java.util.concurrent.ThreadLocal
- 【Scala十二】Scala核心六:Trait
bit1129
scala
Traits are a fundamental unit of code reuse in Scala. A trait encapsulates method and field definitions, which can then be reused by mixing them into classes. Unlike class inheritance, in which each c
- weblogic version 10.3破解
ronin47
weblogic
版本:WebLogic Server 10.3
说明:%DOMAIN_HOME%:指WebLogic Server 域(Domain)目录
例如我的做测试的域的根目录 DOMAIN_HOME=D:/Weblogic/Middleware/user_projects/domains/base_domain
1.为了保证操作安全,备份%DOMAIN_HOME%/security/Defa
- 求第n个斐波那契数
BrokenDreams
今天看到群友发的一个问题:写一个小程序打印第n个斐波那契数。
自己试了下,搞了好久。。。基础要加强了。
&nbs
- 读《研磨设计模式》-代码笔记-访问者模式-Visitor
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
import java.util.ArrayList;
import java.util.List;
interface IVisitor {
//第二次分派,Visitor调用Element
void visitConcret
- MatConvNet的excise 3改为网络配置文件形式
cherishLC
matlab
MatConvNet为vlFeat作者写的matlab下的卷积神经网络工具包,可以使用GPU。
主页:
http://www.vlfeat.org/matconvnet/
教程:
http://www.robots.ox.ac.uk/~vgg/practicals/cnn/index.html
注意:需要下载新版的MatConvNet替换掉教程中工具包中的matconvnet:
http
- ZK Timeout再讨论
chenchao051
zookeepertimeouthbase
http://crazyjvm.iteye.com/blog/1693757 文中提到相关超时问题,但是又出现了一个问题,我把min和max都设置成了180000,但是仍然出现了以下的异常信息:
Client session timed out, have not heard from server in 154339ms for sessionid 0x13a3f7732340003
- CASE WHEN 用法介绍
daizj
sqlgroup bycase when
CASE WHEN 用法介绍
1. CASE WHEN 表达式有两种形式
--简单Case函数
CASE sex
WHEN '1' THEN '男'
WHEN '2' THEN '女'
ELSE '其他' END
--Case搜索函数
CASE
WHEN sex = '1' THEN
- PHP技巧汇总:提高PHP性能的53个技巧
dcj3sjt126com
PHP
PHP技巧汇总:提高PHP性能的53个技巧 用单引号代替双引号来包含字符串,这样做会更快一些。因为PHP会在双引号包围的字符串中搜寻变量, 单引号则不会,注意:只有echo能这么做,它是一种可以把多个字符串当作参数的函数译注: PHP手册中说echo是语言结构,不是真正的函数,故把函数加上了双引号)。 1、如果能将类的方法定义成static,就尽量定义成static,它的速度会提升将近4倍
- Yii框架中CGridView的使用方法以及详细示例
dcj3sjt126com
yii
CGridView显示一个数据项的列表中的一个表。
表中的每一行代表一个数据项的数据,和一个列通常代表一个属性的物品(一些列可能对应于复杂的表达式的属性或静态文本)。 CGridView既支持排序和分页的数据项。排序和分页可以在AJAX模式或正常的页面请求。使用CGridView的一个好处是,当用户浏览器禁用JavaScript,排序和分页自动退化普通页面请求和仍然正常运行。
实例代码如下:
- Maven项目打包成可执行Jar文件
dyy_gusi
assembly
Maven项目打包成可执行Jar文件
在使用Maven完成项目以后,如果是需要打包成可执行的Jar文件,我们通过eclipse的导出很麻烦,还得指定入口文件的位置,还得说明依赖的jar包,既然都使用Maven了,很重要的一个目的就是让这些繁琐的操作简单。我们可以通过插件完成这项工作,使用assembly插件。具体使用方式如下:
1、在项目中加入插件的依赖:
<plugin>
- php常见错误
geeksun
PHP
1. kevent() reported that connect() failed (61: Connection refused) while connecting to upstream, client: 127.0.0.1, server: localhost, request: "GET / HTTP/1.1", upstream: "fastc
- 修改linux的用户名
hongtoushizi
linuxchange password
Change Linux Username
更改Linux用户名,需要修改4个系统的文件:
/etc/passwd
/etc/shadow
/etc/group
/etc/gshadow
古老/传统的方法是使用vi去直接修改,但是这有安全隐患(具体可自己搜一下),所以后来改成使用这些命令去代替:
vipw
vipw -s
vigr
vigr -s
具体的操作顺
- 第五章 常用Lua开发库1-redis、mysql、http客户端
jinnianshilongnian
nginxlua
对于开发来说需要有好的生态开发库来辅助我们快速开发,而Lua中也有大多数我们需要的第三方开发库如Redis、Memcached、Mysql、Http客户端、JSON、模板引擎等。
一些常见的Lua库可以在github上搜索,https://github.com/search?utf8=%E2%9C%93&q=lua+resty。
Redis客户端
lua-resty-r
- zkClient 监控机制实现
liyonghui160com
zkClient 监控机制实现
直接使用zk的api实现业务功能比较繁琐。因为要处理session loss,session expire等异常,在发生这些异常后进行重连。又因为ZK的watcher是一次性的,如果要基于wather实现发布/订阅模式,还要自己包装一下,将一次性订阅包装成持久订阅。另外如果要使用抽象级别更高的功能,比如分布式锁,leader选举
- 在Mysql 众多表中查找一个表名或者字段名的 SQL 语句
pda158
mysql
在Mysql 众多表中查找一个表名或者字段名的 SQL 语句:
方法一:SELECT table_name, column_name from information_schema.columns WHERE column_name LIKE 'Name';
方法二:SELECT column_name from information_schema.colum
- 程序员对英语的依赖
Smile.zeng
英语程序猿
1、程序员最基本的技能,至少要能写得出代码,当我们还在为建立类的时候思考用什么单词发牢骚的时候,英语与别人的差距就直接表现出来咯。
2、程序员最起码能认识开发工具里的英语单词,不然怎么知道使用这些开发工具。
3、进阶一点,就是能读懂别人的代码,有利于我们学习人家的思路和技术。
4、写的程序至少能有一定的可读性,至少要人别人能懂吧...
以上一些问题,充分说明了英语对程序猿的重要性。骚年
- Oracle学习笔记(8) 使用PLSQL编写触发器
vipbooks
oraclesql编程活动Access
时间过得真快啊,转眼就到了Oracle学习笔记的最后个章节了,通过前面七章的学习大家应该对Oracle编程有了一定了了解了吧,这东东如果一段时间不用很快就会忘记了,所以我会把自己学习过的东西做好详细的笔记,用到的时候可以随时查找,马上上手!希望这些笔记能对大家有些帮助!
这是第八章的学习笔记,学习完第七章的子程序和包之后